|
ժҪ �S������İl(f��)չ���Ƽ�Ҳ�õ��M(j��n)���������ģ��˂������ĵ���ҪҲԽ��Խ��ҕ���҂��ĿƼ�����(w��)�����ĵĽǶȳ��l(f��)���O(sh��)Ӌ����POV-LED�@ʾϵ�y(t��ng)��ԓϵ�y(t��ng)ʹ��STC89C52RC������Ҫ���Ɔ�Ԫ�����õ���POV -LED��POV��persistence of visionҕ�Xͣ�������g(sh��)���������۵�ҕ�X����Ч����ͨ�^���D(zhu��n)LED���ķ�ʽ���@ʾ���N�D��ԭ����ͨ�^늄әC(j��)�����όӵ�LED���@늙C(j��)�������S�������D(zhu��n)��ͬ�r��Ƭ�C(j��)�ɼ���������������Ϣ�����Ƹ���LED�������D(zhu��n)ƽ�挦��(y��ng)��λ�����c������(g��u)��һ���cꇮ��������˵�ҕ�X����Ч�������J(r��n)��LED��ͬ�r�c���ģ��Ķ��@ʾ�D��
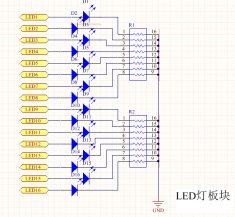
һ��ϵ�y(t��ng)�O(sh��)Ӌ���� 1.1�����w���� ���O(sh��)Ӌ�����p�Դ��늵ķ�ʽ��һ���ֹ��o�ӵ��c������һ���ֹ��o�όӵĆ�Ƭ�C(j��)�����D(zhu��n)���LED�@ʾ���ڸ������D(zhu��n)�r��ʹ��ͨ�^ܛ���ӕrʹ֮������(y��ng)�ĕr�����磬�˵�ҕ�X�����F(xi��n)�Ķ��γ������B�m(x��)�ĈD����ˌ����@ʾ������Բ��Æ�Ƭ�C(j��)����(j��)�侧���l�ʿ����ӕr�팍�F(xi��n)�����û����������ɼ���(sh��)��(j��)���z�y��(bi��o)־�U����(bi��o)־�U����F(xi��n)�������c���Ķ��õ���(w��n)�����@ʾ���档�ɪ������I�_�P(gu��n)���ГQ�����ܣ��Ķ��@ʾ��ͬ�Į��档 ϵ�y(t��ng)��D���£�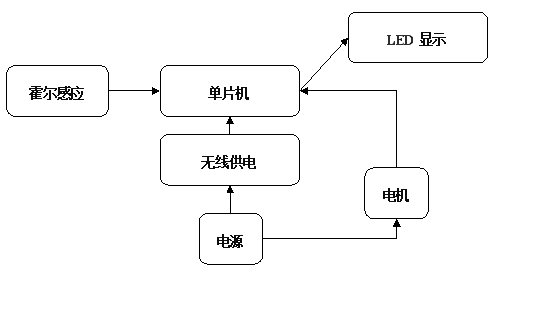 1.2ϵ�y(t��ng)�M�� �Դ���֣� ��늲�����Ҫ�Ƀ���4��(ji��)5̖늳�ͨ�^늳غй̶��B�ӽM�ɣ������^�L�r�g��(n��i)��(w��n)��ݔ��5v��ֱ��늉���늙C(j��)����Ƭ�C(j��)ʹ�á� ��Ƭ�C(j��)���֣���Ƭ�C(j��)���ֲ���STC89C52RCϵ�І�Ƭ�C(j��)оƬ��ԓϵ��оƬ��r������������(w��n)���� ���D(zhu��n)�@ʾ���֣����D(zhu��n)�@ʾ������Ҫ��16�w�NƬʽled�l(f��)����O�ܽM�ɡ� ���������֣����������ֲ��û����������� 2.1���ذ���x�� | | ����ARM��ϵ�y(t��ng)�Ŀ��ƺ��ģ���(y��u)�c�ǹ���(qi��ng)���ɶȶȸߣ�������\�з�(w��n)���ԣ�ϵ�y(t��ng)��̎���ٶȸߣ��m�������Ҏ(gu��)ģ��ϵ�y(t��ng)�Ŀ��ƺ��ġ�
| ����51��Ƭ�C(j��)����ϵ�y(t��ng)�Ŀ��ƺ��ġ������LED�����Ԍ��F(xi��n)�A(y��)�ڵ�����ָ��(bi��o)���ٿء�51��Ƭ�C(j��)�\�㹦��(qi��ng)��ܛ�������`����ɶȴ��ĵ͡��w�eС�����g(sh��)���죬�r������� |
���ڿ��]������̫�ߣ���ô��ϵ�y(t��ng)̎����Ϣ���ٶ�Ҫ��Ҳ�Ͳ���̫�ߡ��C�ϳɱ����]���҂��x����÷������� 2.2 �����ʽ�x�� LED���D(zhu��n)����늙C(j��)���D(zhu��n)�ķ�ʽ�������ǃɷN늙C(j��)�����Č��ȣ� | | ���Æ��Դ��늣�ͨ�^���Դͬ�r�o���ذ�͜p��ֱ��늙C(j��)�M(j��n)�й�늣�ԓ�����ă�(y��u)�c�ǣ��p�ٙC(j��)�����������������㡣��ȱ�c�ǣ�ʹ�Æ�Ƭ�C(j��)�IJ����^��Ӱ푆�Ƭ�C(j��)�Ĺ������ܣ���(w��n)���Ա��^���� | �����p�Դ��늣�ͨ�^�ɂ������Դ�քe����Ƭ�C(j��)�͜p��ֱ��늙C(j��)�M(j��n)�й�늣��˷����ă�(y��u)�c�ǣ��p����̖���ӣ���(w��n)���Ա��^�ã�С܇�\���^��(w��n)���� |
ͨ�^�����Ϸ����M�ı��^���σɷN���������˵õ�����(w��n)����Ч�����҂��xȡ��������
2.3 �(q��)��늙C(j��)�x�� | | ���Üp��ֱ��늙C(j��)����(y��u)�c���·���Ρ��D(zhu��n)�ٷ�(w��n)�����{(di��o)�ٺ��㣬�҃r���������������܇���\�У��܉�ܺõĿ��ơ� | ���ò��M(j��n)늙C(j��)�����M(j��n)늙C(j��)�nj���}�_��̖�D(zhu��n)׃?y��u)��λ�ƻ�λ�Ƶ��_�h(hu��n)����Ԫ���M(j��n)늙C(j��)�����������˂����A(y��)�����ٶ��{(di��o)�٣�����늙C(j��)�Ŀ����^���(f��)�s�� |
��1.1 늙C(j��)���܌���
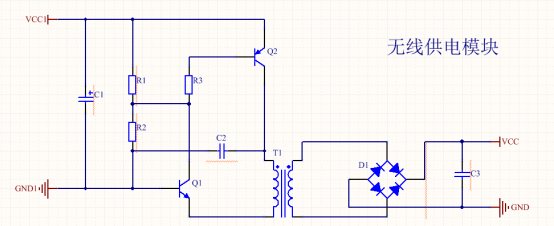
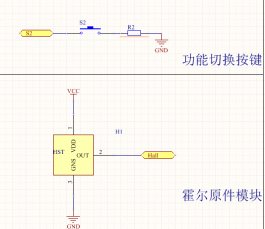
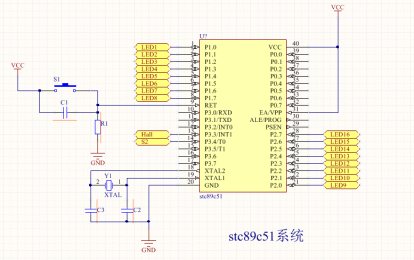
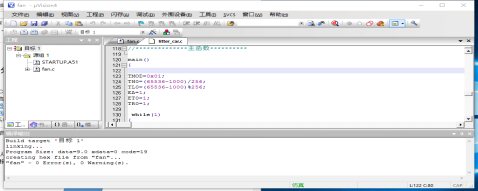
�C�Ͽ��]�����Üp��ֱ��늙C(j��)����LED���D(zhu��n)늙C(j��)�� 2.4��늷������x�� ԓ�b�õ��y�c֮һ���ڹ�늵����c��Ҫ��늵����D(zhu��n)�l(f��)�ⲿ�ֵ�늚��B�ӣ��b��Ҫ���ܽo���D(zhu��n)�l(f��)�ⲿ���ṩ��(w��n)����ֱ��늉���ͬ�r�����^С��Ӱ�늙C(j��)�������D(zhu��n)�ӡ� 1�ˢ�B�� ��(y��u)�c���ɱ������^�ͣ����ṩ��(w��n)��늉���ͬ�r�ˢ�����r���D(zhu��n)��һ�������^�ԣ������^�� ȱ�c�������p��������(w��n)�����^��דp�������|����^��늉��p���^��������ˇҪ��ߡ� 2���h(hu��n) ��(y��u)�c�����ṩ��(w��n)��늉������|���O��С��늉��p���^С��ռ���w�e�^С�������^С�� ȱ�c��Ԫ���r��ߡ� 3�o����� ��(y��u)�c�����ṩ��(w��n)��늉��������^С�� ȱ�c���·Ԫ����(sh��)���^�࣬ռ���w�e�^�� �C�Ͽ��]�҂����ßo����늷�ʽ�� 2.5���D(zhu��n)�@ʾ���ֵ��x�� �NƬʽLed�l(f��)����O�� ��(y��u)�c���w�e�^С�������^�p�� ȱ�c�������������m�������⏊(qi��ng)��h(hu��n)���� ֱ��ʽled�l(f��)����O�� ��(y��u)�c�������^�ߣ��@ʾЧ���á� ȱ�c��ռ���w�e�^�������^�� �C�Ͽ��]�҂������NƬʽLed�l(f��)����O�ܡ� 3���·�c�����O(sh��)Ӌ 3.1�o����� ��Ƭ�C(j��)ϵ�y(t��ng)��LED�����ֲ���늙C(j��)�ϣ���늙C(j��)���|���D(zhu��n)�����ֱ����늾���Ȼ�����g��һ��Ȼ�������ЈF(tu��n)��]�˃ɷN������1.�ˢ��늣�2.�o����늡��ڇLԇ��һ�N�ˢ�r������늙C(j��)�D(zhu��n)�ӕ��a(ch��n)����ӣ�ʹ���ˢ����(w��n)����(d��o)��Ƭ�C(j��)оƬһֱ̎�����à�B(t��i)�����Բ����˟o����늣��·�D���£� ԭֱ����Դ��늽�(j��ng)�^���l��ʎ�·�a(ch��n)����ʎ�����������ģ�K���Б�(y��ng)��Ȧ���øБ�(y��ng)��Ȧ����܂���늙C(j��)�ϵ��·�������˵���ǽ���늣���(j��ng)�^���������������V���a(ch��n)��һ����(w��n)����ֱ��늉��o��Ƭ�C(j��)��늡� 3.2��ʼλ��У��(zh��n) ����늙C(j��)�D(zhu��n)�ٵķ�(w��n)����ֱ�ӛQ�����@ʾ�Ƿ�����Ӱ��Ӱ��Ȼ����Ҫ����ȫ��׃�Dz����ܵġ����@�N��r�£��`����e�۶��γɸ�Ӱ�� �������ԣ�����ʼλ�õIJ���C�������ɷDz��M(j��n)늙C(j��)�������D(zhu��n)LED�@ʾ���ز����ٵļ��g(sh��)��ͨ�^�����������z�y���ڹ̶�λ�õ�С���F�����ඨλ��ʼλ�������e���`����b���Ю�(d��ng)����ԭ�����̶�С���Fλ�ã��͕�����?q��)�ͨ�a(ch��n)�����ƽ���|�l(f��)�ⲿ�Дࡣָᘰ�ÿ���D(zhu��n)һ�ܣ��͕��a(ch��n)���@��һ���Д���̖���@����̖���Q�顰�^����̖���� �ⲿ�Д���΄�(w��)�nj����D(zhu��n)�Ƕ����㣬�Դ������e���`� 3.3�����ГQ ͨ�^��(d��ng)��ס���I�r��STC89C51оƬIO�ڙz�y�����λ��Ȼ��ͨ�^�����O(sh��)Ӌ�팍�F(xi��n)�����ГQ�� 3.4��Сϵ�y(t��ng)�cLED��� һ���l���·���ϼ�����16���NƬ�Ͱl(f��)��LED�����LED��������LED���·���@��һ���S늄әC(j��)�D(zhu��n)�ӡ���STC89C51оƬIO�ڿ��ƣ���(d��ng)�D(zhu��n)�ӵ����m�ĽǶȕr������(y��ng)��IO��ݔ�����ƽ�c�����m��LED�Ϳ����@ʾ��Ҫ�@ʾ�ă�(n��i)�ݡ� 4 ܛ���O(sh��)Ӌ 4.1 ܛ��ƽ�_ ���飺Keil C51������Keil Software��˾��Ʒ��51ϵ�м��݆�Ƭ�C(j��)C�Z��ܛ���_�l(f��)ϵ�y(t��ng)���c�R����ȣ�C�Z���ڹ����ϡ��Y(ji��)��(g��u)�ԡ����x�ԡ��ɾS�o(h��)���������@�ă�(y��u)�ݣ�����W(xu��)���á�Keil�ṩ�˰���C���g������R����朽������������һ������(qi��ng)��ķ����{(di��o)ԇ�����ڃ�(n��i)�������_�l(f��)������ͨ�^һ�������_�l(f��)�h(hu��n)������Vision�����@Щ���ֽM����һ���\��Keilܛ����ҪWIN98��NT��WIN2000��WINXP�Ȳ���ϵ�y(t��ng)�������ʹ��C�Z�Ծ��̣���ôKeil��������IJ���֮�x����ʹ��ʹ��C�Z�Զ��H�ÅR���Z�Ծ��̣��䷽�����õļ��ɭh(hu��n)������(qi��ng)���ܛ�������{(di��o)ԇ����Ҳ�������°빦����[3]����������D4.4.1��
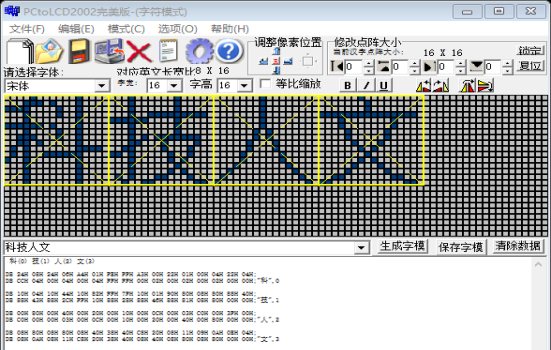
��һ���õ���ܛ����PCtoL2002,������Ч�p�ٳ����_�l(f��)���ڡ�����������D4.4.2
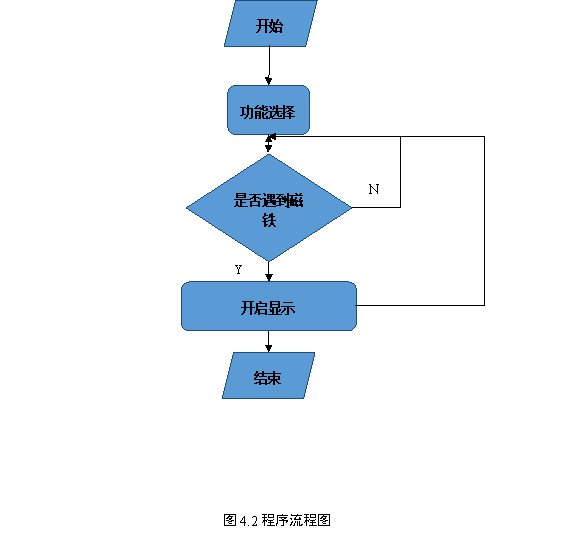
4.2���������O(sh��)Ӌ ԓP(y��ng)OV-LEDͨ�^���r�z�y����ģ�K��������ݔ���ƽ�����üt�⌦�ܙz�y�ھ����F(xi��n)���E,ͨ�^����?zh��n)��������F(xi��n)�͜�𣬏Ķ����F(xi��n)��ِ�Ļ���Ҫ����������̈D��D4.4��ʾ�� 5 �Y(ji��)���Z �Ŀ�O(sh��)Ӌ��STC89C52RC��Ƭ�C(j��)����ģ������˻����������������`����ԓ�C(j��)���˿��Ԍ��F(xi��n)�������ܣ� - ���r�z�y���I���ГQ������
- ��(w��n)���@ʾ�D��
6���
��Ƭ�C(j��)Դ��������:
- #include <reg52.h>
- #include<intrins.h>
- #define uint unsigned int
- #define uchar unsigned char
- //Led P1,P2
- sbit key=P3^3;//�����_�P(gu��n)
- sbit key_1=P3^4;//�����_�P(gu��n)
- voidtongxinyuan();
- voidhanzi();
- int s;
- s=0;
- uchar code table[]={
- 0x00,0x00,0x80,0x00,0x80,0x00,0x80,0x20,0x80,0x10,0x80,0x10,0x80,0x08,0x80,0x08,
- 0x80,0x0C,0x80,0x04,0x90,0x06,0x90,0x02,0x88,0x03,0xC8,0x01,0xD8,0xF9,0xF8,0xFF,
- 0xF4,0x7F,0x54,0x02,0x46,0x02,0x46,0x02,0x42,0x02,0x40,0x04,0x00,0x04,0x00,0x04,
- 0x00,0x04,0x40,0x04,0x40,0x04,0xC8,0x02,0x90,0x02,0x90,0x02,0x10,0x02,0x00,0x02,
- 0x01,0x02,0x03,0x02,0xFF,0xFF,0xFE,0xFF,0xFE,0x3F,0x00,0x02,0x00,0x02,0x00,0x02,
- 0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*"��",0*/
-
- 0x00,0x00,0x00,0x00,0x00,0x08,0x00,0x08,0x00,0x18,0x00,0x18,0x40,0x18,0x40,0x08,
- 0x40,0x08,0x40,0x44,0x40,0x84,0x40,0x84,0x40,0x86,0x43,0xE2,0xFF,0xFF,0xFE,0xFF,
- 0x22,0x01,0x20,0x01,0x20,0x00,0x20,0x80,0x00,0x80,0x00,0x80,0x00,0x86,0x20,0x86,
- 0x20,0x46,0x20,0x46,0x20,0x4A,0x20,0x4A,0x21,0x71,0xF3,0x31,0xFE,0x31,0x3E,0x31,
- 0x36,0x39,0x12,0x7F,0x10,0x6F,0x10,0x47,0x10,0xC1,0x10,0xC1,0x10,0xC0,0x10,0x80,
- 0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*"��",1*/
-
- 0x00,0x00,0x00,0x00,0x00,0x80,0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x20,0x00,0x20,
- 0x00,0x20,0x00,0x10,0x00,0x10,0x00,0x18,0x00,0x08,0x00,0x0C,0x00,0x06,0x00,0x06,
- 0x00,0x03,0x80,0x01,0xC0,0x01,0xE0,0x00,0x70,0x00,0x7C,0x00,0xBC,0x00,0x1C,0x01,
- 0x0C,0x01,0x04,0x03,0x00,0x02,0x00,0x06,0x00,0x04,0x00,0x0C,0x00,0x0C,0x00,0x18,
- 0x00,0x18,0x00,0x30,0x00,0x30,0x00,0x70,0x00,0x60,0x00,0x60,0x00,0x60,0x00,0x60,
- 0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x40,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*"��",2*/
-
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x00,0x80,0x00,0x40,0x00,0x40,
- 0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x41,0x40,0x21,0x40,0x21,0x40,0x21,
- 0x20,0x22,0x20,0x32,0x22,0x16,0x22,0x1C,0x22,0x1C,0x26,0x0E,0xE6,0x0F,0xE6,0x1F,
- 0xE4,0x11,0xE0,0x30,0x10,0x30,0x10,0x20,0x10,0x60,0x10,0x60,0x10,0x40,0x10,0xC0,
- 0x10,0xC0,0x10,0xC0,0x10,0xC0,0x10,0xC0,0x10,0xC0,0x00,0x80,0x00,0x80,0x00,0x80,
- 0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*"��",3*/
-
- };
-
- voiddelayms(uint z)
- {
- uinti,j;
- for(i=z;i>0;i--)
- for(j=110;j>0;j--);
-
- }
- /*****n��us���ӕr�ӳ���*****/
- voidDelayUs(uint N)
- {
- uint x;
- for(x=0; x<=N;x++);
- }
- /*****�I�P����*****/
- intkeyscan()
- {
- if(key_1==0)
- {
- delayms(10);
- if(key_1==0)
- {
- while(!key_1);
- if(++s==3)s=0;
- }
- }
- return s;
- }
-
- //****************ͬ�ĈA******************
- voidtongxinyuan()
- {
- int k;
- P1=0x01;
- for(k=0;k<8;k++)
- {
- delayms(500);
- P1=_crol_(P1,1);
- }
- P1=0x00;
- P2=0x01;
- for(k=0;k<8;k++)
- {
- delayms(500);
- P2=_crol_(P2,1);
- }
- P2=0x00;
- while(key_1);
- }
- //****************�h��******************
- voidhanzi()
- {
- inti;
- if(key==0)
- {
- for(i=0;i<512;i++)
- {
- P1=table[i];
- P2=table[++i];
- DelayUs(10);
- }
- P1=0x00;
- P2=0x00;
- }
- }
-
- //****************������(sh��)******************/
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ��51�����d������������
������Word��ʽ�O(sh��)Ӌ����ęn51�����d��ַ��
 ����STC89C52��POV.docx
(323.17 KB, ���d��(sh��): 218)
����STC89C52��POV.docx
(323.17 KB, ���d��(sh��): 218)
2017-10-31 12:27 �ς�
�c���ļ������d����
��� ���d�e��: �ڎ� -5
|




 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��