����
����Ӝy���I(l��ng)���У��l�ʜy���ľ��_������ߵģ����_(d��)10��10

��(sh��)��������ˣ������a(ch��n)�^�����S��������������ضȡ�������������Һλ��PHֵ����ӡ�λ�ơ��ٶȡ����ٶȣ��������N���w�İٷֱȳɷֵȾ��Â������D(zhu��n)�Q����̖�l�ʣ�Ȼ���Ô�(sh��)���l��Ӌ(j��)��y��������߾��_�ȡ�
���H�ϔ�(sh��)���l��Ӌ(j��)�ķ�ܶࡣ�����ܷ����Ӌ(j��)��(sh��)ʽ�l��Ӌ(j��)�Ĝy�����ܺܶ࣬��;�V�����Ը���(j��)�x�����еĹ��ܣ����Ӌ(j��)��(sh��)����ͨ�ú͌���֮�֡�һ��ͨ����Ӌ(j��)��(sh��)����ͨ����Ӌ(j��)��(sh��)����һ�N���ж�N�y�����ܡ���N��;���f��Ӌ(j��)��(sh��)�������ɜy���l�ʡ����ڡ�������ƽ��ֵ���r(sh��)�g�g�����ۼ�Ӌ(j��)��(sh��)��Ӌ(j��)�r(sh��)�ȣ�����������(y��ng)������Ϳɜy��λ��늉�����������ʡ���������������m��(d��ng)?sh��)Ă�������߀���M(j��n)���L�ȡ��������������ضȡ��ٶȵȷ�����Ĝy������������Ӌ(j��)��(sh��)��������Ӌ(j��)��(sh��)��ָ���T�Á�y��ij�N��һ���ܵ�Ӌ(j��)��(sh��)�������l��Ӌ(j��)��(sh��)����ֻ�܌��T�Á�y�����l�����l�ʣ��r(sh��)�gӋ(j��)��(sh��)�������Ԝy���r(sh��)�g����A(ch��)��Ӌ(j��)��(sh��)������y�r(sh��)�ֱ����͜�(zh��n)�_�Ⱥܸߣ����_(d��)ns��(sh��)�������طNӋ(j��)��(sh��)�����������طN���ܣ������Ӌ(j��)��(sh��)�����ֵӋ(j��)��(sh��)������ֵӋ(j��)��(sh��)��������(sh��)Ӌ(j��)��(sh��)���ȣ����ڹ��I(y��)���Կؼ��g(sh��)�ȷ��档��(sh��)���l��Ӌ(j��)���l�η���ٵ���Ӌ(j��)��(sh��)�������Ӌ(j��)��(sh��)�l�ʣ�10MHz��������Ӌ(j��)��(sh��)�������Ӌ(j��)��(sh��)�l��10��100MHz���۸���Ӌ(j��)��(sh��)�������Ӌ(j��)��(sh��)�l�ʣ�100MHz�������l��Ӌ(j��)��(sh��)�����y�l����1��80GHz����ߡ�
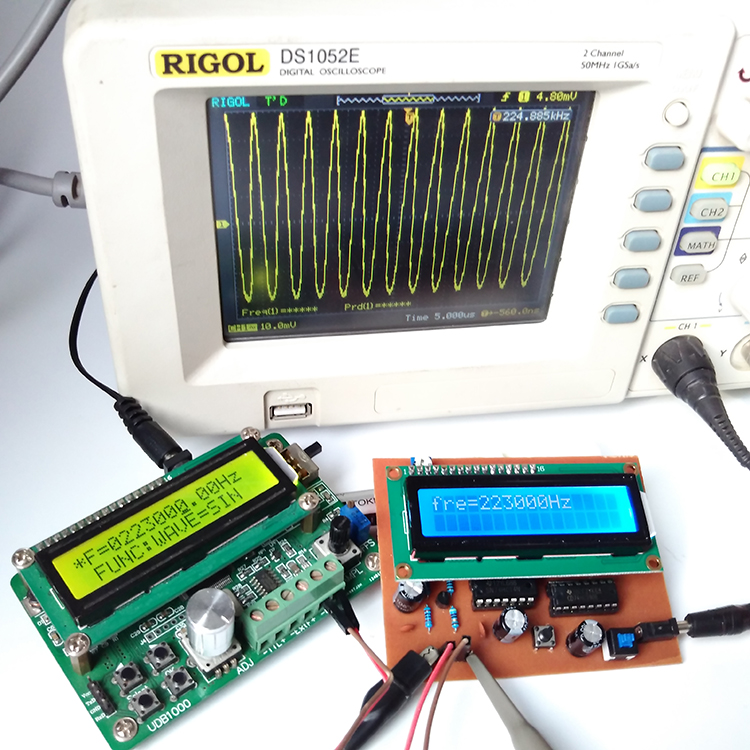
���ڴ�Ҏ(gu��)ģ�ͳ���Ҏ(gu��)ģ��(sh��)�ּ����·���g(sh��)����(sh��)��(j��)ͨ�ż��g(sh��)�c��Ƭ�C(j��)���g(sh��)�ĽY(ji��)�ϣ���(sh��)���l��Ӌ(j��)�l(f��)չ�M(j��n)�������ܻ����ͻ������A�Ρ��书���M(j��n)һ���U(ku��)���˜y���l�ʡ��l�ʱȡ����ڡ��r(sh��)�g����λ����λ��Ȼ��������⣬߀�����ԓ졢��У�����\�ࡢ��(sh��)���y(t��ng)Ӌ(j��)��Ӌ(j��)�㷽����ֵ����(sh��)��(j��)�惦�͔�(sh��)��(j��)ͨ�ŵȹ��ܡ���Ҋ���l��Ӌ(j��)�Ǻ��й��I(y��)�r(ji��)ֵ�ġ�����Ʒ����һ��(g��)���چ�Ƭ�C(j��)�Ĕ�(sh��)���l��Ӌ(j��)����ͨ�^74HC390оƬ�M(j��n)�з��l���˷��ˆ�Ƭ�C(j��)�y��̎�����l��̖�����y����ʹ��LCD1602Һ���@ʾ�M(j��n)��ݔ�������_�Ȟ�20�f��֮һ��
1 �·���ܡ�Ӳ���cԭ��
�˴���������O(sh��)Ӌ(j��)�c������(sh��)Ӗ(x��n)��С�M���}Ŀ�顰��(sh��)���l��Ӌ(j��)���O(sh��)Ӌ(j��)�������м�(x��)�о����}ĿҪ��ͨ�^С�M��(n��i)���e�O��(x��)�µ�ӑՓ֮�Q����Ʒ���õĹ��ܷ������£����ܜy�����Ҳ������Dz����Ȳ��ε��l�ʡ����l�ʵĜy��������1Hz��20MHz�����ܙz�y������Сֵ��1Vpp����̖����ͨ�^LCD1602Һ���@ʾ���@ʾ�z�y���ļ��r(sh��)�l�ʔ�(sh��)ֵ(���8λ��(sh��)����λ��Hz)��ֵ��һ����ǣ���(d��ng)ݔ���l�ʴ���20KHz����̖�r(sh��)�����ڲ�����100���l�ɘӣ��@ʾ�Y(ji��)�������`���ݔ�����y���l��20MHz����̖�r(sh��)��LCD1602Һ���@ʾ�����@ʾ�Ĝy���Y(ji��)����19998900HZ���`����^ʮ�f��֮һ���ڿɽ��ܷ���֮��(n��i)��
�����Դ��yݔ����̖����?y��n)�����B�·�и���(g��)����ģ�K��
1.1�·��Ҫģ�K
1.1.1��̖�ɼ�ģ�K
�D1.1 �������O�ܹ���Ŵ��·����̖�ɼ�ģ�K
������Ч��ֹ����̖�^С����ɵęz�y�ϵK������̖ݔ��̎���������O�ܹ���Ŵ��·����D1.1��ʾ����(sh��)�H�����У��҂���횽�Q�Ŵ��·�c��̖Դ���Ŵ��·�cؓ(f��)�d֮�g����φ��}��һ����Ҫ������·�܉��ݔ������ݔ���ݔ����̖����ݔ�^���е���̖�p�ıM����С����һ������Ҫ����̖Դ���Ŵ��·��ؓ(f��)�d֮�g��ֱ��������B(t��i)���a(b��)Ӱ푣����С���ֱ�����ã��·��C1��C7�ͺܺõĽ�Q���@��(g��)���}���̶�ƫ�ù���O�Ŵ�������늘O늉�ͨ�^���Oƫ�����R2ʹ���w��Je��ƫ��ͬ�r(sh��)���^R3ʹJc��ƫ���Ķ���(sh��)�F(xi��n)��̖Դ�Ŵ�
1.1.2�}�_�a(ch��n)��ģ�K
�D1.2 74HC14���_�D���܈D
�}�_�a(ch��n)��ģ�K����74HC14��(sh��)�F(xi��n)������ʩ�����|�l(f��)�����࣬�ĈD1.2���Կ�����������̖�ɼ�ģ�K�Ľ�(j��ng)�^�Ŵ����̖��74HC14��1�_�M(j��n)�룬��(j��ng)�^1A��1Y��2A��2Y��3A��3Y����ʩ�����|�l(f��)��������K������׃����ݔ����̖�D(zhu��n)�Q���������o���ӵ���̖��6�_ݔ����
���w��ÿһ��(g��)ʩ�����|�l(f��)���������f�����D(zhu��n)�����Ժ�ݔ��ݔ�������P(gu��n)ϵ��D1.3��ʾ��
�D1.3 74HC14��(g��)ʩ�����|�l(f��)���D(zhu��n)�����Ժ�ݔ��ݔ������
ͨ�^Proteus������ͬ�r(sh��)�^�쵽����̖ݔ��r(sh��)74HC14��1�_��2�_��4�_��6�_�ϵIJ��η��档
�D1.4 ݔ����̖ͨ�^74HC14�D(zhu��n)�Q���}�_
1.1.3���lģ�K
�D1.5 �����p4λʮ�M(j��n)�Ʋ��yӋ(j��)��(sh��)��74HC390�ķ��lģ�K
74HC390�����а˂�(g��)�����|�l(f��)�������T�Ԙ�(g��u)�Ƀɂ�(g��)��(d��)����4λӋ(j��)��(sh��)��������ÿ��(g��)Ӌ(j��)��(sh��)�������ɂ�(g��)���֣�����2Ӌ(j��)��(sh��)���֡��͡���5Ӌ(j��)��(sh��)���֡���ÿ��(g��)Ӌ(j��)��(sh��)������һ��(g��)���ݔ���һ��(g��)�r(sh��)�ݔ�롣�����Ԍ�(sh��)�F(xi��n)����2 ���l��5 ���l����100 ���l���κ��ۼӱ���(sh��)�������L�ȣ��ҿ����B��ʮ�M(j��n)��Ӌ(j��)��(sh��)�����-���M(j��n)��Ӌ(j��)��(sh��)���Էքe��(sh��)�F(xi��n)�ɷN�M(j��n)�ƵĔ�(sh��)ֵݔ��������ÿ��(g��)Ӌ(j��)��(sh��)�����в���ݔ��������ϵ�y(t��ng)���r(sh��)��̖���ԫ@��ݔ��Ӌ(j��)��(sh��)�l�ʵ��κ����ӡ�
74HC390�����������c(di��n)��
��A��B�|�l(f��)�����Ъ�(d��)���ĕr(sh��)�
��ÿ��(g��)Ӌ(j��)��(sh��)������ֱ�����
����Ч���ϵ�y(t��ng)�ܶ�
�ܾ��_ݔ���pС��늘O�D(zhu��n)�Q�Ŀ�����
�D1.6 74HC390��(g��)Ӌ(j��)��(sh��)�����܈D
��74HC390�Ć�(g��)Ӌ(j��)��(sh��)�����܈D�п��Կ��������nCP0ݔ���l�ʞ�f�ĕr(sh��)���̖���t����nQ0�õ��l�ʞ�f/2����̖�����nCP1ݔ��r(sh��)���̖���t����nQ1��nQ2��nQ3�õ�����1׃���ĽM����̖��
��1 �r(sh��)���̖��nCP1ݔ��r(sh��)Q2:Q1:Q0��ֵ��
�ɴ�չ�_�O(sh��)�룺���چ�Ƭ�C(j��)�ɲ����l�����ޣ���ݔ����̖�l���^��t��Ƭ�C(j��)�o���ɹ���(sh��)�F(xi��n)�}�_Ӌ(j��)��(sh��)�������Ҫʹ��74HC390�M(j��n)�з��l����100���l����(���w��200KHz������̖��ȡ100���l���ٙz�y��200KHz��������̖�t�z�yδ��(j��ng)100���l��ԭʼ��̖)����ȡ�ķ����飺�ı�1�п��Կ��������nCP1ݔ���l�ʞ�f�ĕr(sh��)���̖���t����nQ2̎ݔ���l�ʞ�f/5���}�_��̖����˿��M(j��n)����D1.5��ʾ���B��������1CP1--1Q2��2CP1--2Q2��1CP0--1Q0��2CP0--2Q0�����С���������оƬ�ⲿ늚��B�ӣ���--������оƬ��(n��i)�������B�ӣ��Ķ��õ�5��5��2��2=100���l�������1CP1ݔ��һ��(g��)�l�ʞ�f����̖���t����2Q0ݔ��һ��(g��)�l�ʞ�f/100�ķ��l��̖��

1.1.4��оƬ
�D1.7 ��оƬ89S52
����89S52��Ƭ�C(j��)�Ĺ������ñ��ğo��٘�ԣ��ڴ�ֻ�f���c����Ʒ���P(gu��n)�IJ��֣�δ��(j��ng)100���l�Ĵ��y��̖�����Ƭ�C(j��)�Ķ��r(sh��)/Ӌ(j��)��(sh��)��0(P3.4),100���l��Ĵ��y��̖�����Ƭ�C(j��)�Ķ��r(sh��)/Ӌ(j��)��(sh��)��1(P3.5)����Ƭ�C(j��)��P1.0��P1.1��P1.2�քe��1602LCDҺ���@ʾģ�K��Ƭ�x���ơ��x�����ƺ�ʹ�ܿ��ƣ���P0.0-P0.7�t����1602оƬ�Ĕ�(sh��)��(j��)���_D0-D7������ֵ��һ����ǣ��˞�52��Ƭ�C(j��)���䶨�r(sh��)��2����16λ�Ԅ����b�d�Д�ܣ����顰interrupt 5���Дʽ��
1.1.5Һ���@ʾݔ��ģ�K
�D1.8 1602Һ����(sh��)��D
�D1.9 1602Һ�����_���к����_�����f��
����ƪ��������ᘌ�1602Һ���@ʾоƬ�Ĺ��������H�����c����Ʒ���P(gu��n)���֡�
�����f��1602Һ���@ʾоƬ�ڱ���Ʒ������ɵĹ��ܣ��ٛ]����̖ݔ��r(sh��)Һ���@ʾ��fre= Hz��������̖ݔ��r(sh��)Һ���@ʾ��Ƭ�C(j��)RAM�е�ȫ��׃����fre���ļ��r(sh��)��(sh��)ֵ������@ʾ8λ,���@ʾ�oЧ�ġ�0��������fre=123���tҺ���@ʾ��fre=123Hz������
�����Y(ji��)�Ͼ��w���������1602Һ���@ʾģ�K�ڱ���Ʒ�Ќ�(sh��)�F(xi��n)�Ĺ��ܣ�
�ٳ����^�ļ�
unsigned long int fre;
unsigned char time;
unsigned int count;
unsigned int count1;
sbit LCD_RS=P1^0; //Ƭ�x��̖
sbit LCD_RW=P1^1; //�x����̖
sbit LCD_E=P1^2; //ʹ����̖
#define LCD_DB P0 //��(sh��)��(j��)��̖
unsigned char character[10]={0};//����Ļ���@ʾ���ַ���
unsigned char character_1[]={"fre= Hz"};
unsigned char FLAG = 0;
void LCD_init(void);//��ʼ������(sh��)
void LCD_write_command(unsigned char command);//��ָ���(sh��)
void LCD_write_data(unsigned char dat);//����(sh��)��(j��)����(sh��)
void LCD_disp_char(unsigned char x,unsigned char y,unsigned char dat);//��ij��(g��)��Ļλ�����@ʾһ��(g��)�ַ�,X��0-15),y(1-2)
void delay_n40us(unsigned int n);//�ӕr(sh��)����(sh��)
void timer_init(); //�Д��ʼ������(sh��)
�ں���(sh��)�O(sh��)��
void LCD_write_command(unsigned char dat) //�������(sh��)
{
LCD_DB=dat;
LCD_RS=0;//ָ��
LCD_RW=0;//����
LCD_E=1; //ʹ��
LCD_E=0;
delay_n40us(1);//�������ӕr(sh��)
}
void LCD_write_data(unsigned char dat) //����(sh��)��(j��)����(sh��)
{
LCD_DB=dat;
LCD_RS=1;//��(sh��)��(j��)
LCD_RW=0;//����
LCD_E=1;//ʹ��
LCD_E=0;
delay_n40us(1); //����(sh��)��(j��)�ӕr(sh��)
}
1602оƬ��4̖���_��RS(��(sh��)��(j��)/�����x��ˣ�1��(sh��)��(j��)�Ĵ�����0ָ��Ĵ���)��5̖���_��RW(�x���x��ˣ�1�x��0��)��6̖���_��EN(ʹ�ܶˣ�1���S�x����0��ֹ�x��)������{(di��o)��LCD_write_command����(sh��)�r(sh��)��׃��dat������ָ����̖ݔ�������1602оƬ���{(di��o)��LCD_write_data����(sh��)�r(sh��)��׃��dat�����锵(sh��)��(j��)��̖ݔ��1602оƬ��
void LCD_init(void) //Һ����ʼ������(sh��)
{
LCD_write_command(0x38);//�O(sh��)��8λ��ʽ��2�У�5x7
LCD_write_command(0x38);//�O(sh��)��8λ��ʽ��2�У�5x7
LCD_write_command(0x38);//�O(sh��)��8λ��ʽ��2�У�5x7
LCD_write_command(0x0c);//���w�@ʾ���P(gu��n)���(bi��o)�����W�q
LCD_write_command(0x06);//�O(sh��)��ݔ�뷽ʽ����������λ
LCD_write_command(0x01);//�����Ļ�@ʾ
delay_n40us(100);//�����ӕr(sh��)
}
������Ҫ�f�����ǣ���(zh��)������LCD_write_command(0x38)��Ŀ��������1602оƬ�����ݡ�
�M(j��n)�й����O(sh��)���r(sh��)��ָ���ʽ���£�001 DL N F 00��DL=1�r(sh��)����(sh��)��(j��)�L�Ȟ�8λ��DL=0�r(sh��)����(sh��)��(j��)�L�Ȟ�4λ��N=1�r(sh��)�@ʾ�p���֣�N=0�r(sh��)�@ʾ�����֣�F=1�r(sh��)�@ʾ5��10���Σ�F(xi��n)=0�r(sh��)�@ʾ5��7���Ρ�����Ʒ�в���8λ��(sh��)��(j��)��ʽ��2���@ʾ��5x7�ַ��@ʾ���ʈ�(zh��)��0011 1000B(0x38)ָ�
�M(j��n)���@ʾ���_�P(gu��n)�O(sh��)���r(sh��)��ָ���ʽ���£�0000 1DCB��D=1�r(sh��)�����w�@ʾ��C=1�r(sh��)���_�����(bi��o)��B=1�r(sh��)�����(bi��o)����λ�ù��(bi��o)�W�q������Ʒ�в����P(gu��n)�]�@ʾ���P(gu��n)���(bi��o)�����W�q���ʈ�(zh��)��0000 1100B(0x0c)ָ�
�M(j��n)���M(j��n)��ģʽ�O(sh��)���r(sh��)��ָ���ʽ���£�0000 01 I/D S��I/D=1�r(sh��)���f��, I/D=0�r(sh��)���f�p��S=1�r(sh��)���_���@ʾ��������(g��)���Ƅӣ�S=0�r(sh��)����Ļ���Ƅӡ�����Ʒ�в�����������λ���ʈ�(zh��)��0000 0110B(0x06)ָ�
����ָ���0000 0001B(0x01)��
void LCD_disp_char(unsigned char x,unsigned char y,unsigned char dat)//�@ʾһ��(g��)�ַ�
{
unsigned char address;
if(y==1)
address=0x80+x; //�@ʾ�ڵ�һ�ŵĕr(sh��)���x�ĵ�ַ
else
address=0xc0+x; //�@ʾ�ڵڶ��ŵĕr(sh��)���x�ĵ�ַ
LCD_write_command(address); //ݔ���ַ
LCD_write_data(dat); //ݔ�딵(sh��)��(j��)
}
void LCD_disp_num(unsigned char x,unsigned char y,unsigned char dat)//�@ʾһ��(g��)��(sh��)��
{
unsigned char address;
if(y==1)
address=0x80+x; //�@ʾ�ڵ�һ�ŵĕr(sh��)���x�ĵ�ַ
else
address=0xc0+x; //�@ʾ�ڵڶ��ŵĕr(sh��)���x�ĵ�ַ
LCD_write_command(address); //ݔ���ַ
LCD_write_data(dat+48); //ݔ�딵(sh��)��(j��)
}
��2 1602Һ���@ʾ��ַ(16�С�02��)
����(j��)��2�����˽1602Һ����һ�е�һ���@ʾλ�ĵ�ַ��0x80���ڶ��е�һ���@ʾλ�ĵ�ַ��0xC0�����LCD_disp_char��LCD_disp_num�еą���(sh��)y��1�r(sh��)ݔ����ַ���(sh��)���@ʾ�ڵ�һ�У�����(sh��)y��0�r(sh��)ݔ����ַ���(sh��)���@ʾ�ڵڶ��У����F(xi��n)����һ�Єt�Ʌ���(sh��)x�Q����
�D1.10 1602Һ����(bi��o)��(zh��n)�ַ���
��D1.10��ʾ��1602Һ�����@ʾ��ÿһ��(g��)�ַ�����һ��(g��)Ψһ�Ĵ��a�����С�A��̎��0100 0001B(ʮ�M(j��n)��65)λ�ã���a��̎��0110 0001B(ʮ�M(j��n)��97)λ�ã���0��̎��0011 0000B(ʮ�M(j��n)��48)λ�ã��҂�֪����A������a���� ��0����ASCII�a�քe��65��97��48�����ֻҪ�څ���(sh��)datֱ̎��ݔ����ĸ��(sh��)�ֵ�ASCII�a���ɣ���ĸ��ASCII�a������ĸ��������(sh��)�ֵ�ASCII�a�t��48+��(sh��)�֡�
void dis_num(void)
{
unsigned char i=0,j=0,k=0;
LCD_write_command(0x01);//�����Ļ�@ʾ
character[0] = fre/10000000;
character[1] = fre/1000000%10;
character[2] = fre/100000%10;
character[3] = fre/10000%10;
character[4] = fre/1000%10;
character[5] = fre/100%10;
character[6] = fre/10%10;
character[7] = fre%10;
character[8] = 'H';
character[9] = 'z';
for(i = 0;i<4;i++) //�@ʾfre=
{
LCD_disp_char(i+0,1,character_1[ i]);
}
for(i = 0;i<10;i++) //�Д��һ��(g��)����0�Ĕ�(sh��)
{
if(character[ i]!=0)
break;
}
k = 8-i;
for(j = 0;j<k;j++) �@ʾ���еĔ�(sh��)��[="" align] for(i = 5;i<7;i++) //�@ʾHz
{
LCD_disp_char(j+4,1,character_1[ i]);
j++;
}
}
�˞錍(sh��)�F(xi��n)�����ᵽ��1602Һ��оƬ�ڱ���Ʒ��Ҫ�l(f��)�]�Ĺ��ܢڵĺ���(sh��)������ʹ��һ��(g��)��Ҏ(gu��)�����ַ���ȫ��׃��fre�е�8λ��(sh��)�ַքe�xֵ�o��(sh��)�Mcharacter[0]- character[7]��character[8]:character[9]�t�̶��顰Hz�����ڌ���(sh��)�Mcharacter_1[]�е��ַ�����fre=���@ʾ��1602Һ����һ�е�ǰ���е�ͬ�r(sh��)������̓�M���(bi��o)�ľֲ�׃��i��ֵ׃?y��u)?��������ͨ�^��λ�z���ų���i��λ��fre�ĵ�һ��(g��)������Ĕ�(sh��)λ�ϣ��˕r(sh��)8-i�Ĕ�(sh��)ֵ����fre����Ч��(sh��)�ւ�(g��)��(sh��)����Ч��(sh��)�ּ�Ҫ�@ʾ��1602Һ���ϵĔ�(sh��)�֣��t���ַ���=������һλ��Ox84�_ʼ��λ��������Ч��(sh��)���@ʾ��Һ���ϣ�����a(b��)���ַ�����Hz����
�D1.21 LCD1602Һ���@ʾоƬ
�����1602Һ���@ʾоƬ�ĽӾ�ԭ��D����Ҫ�f�����ǣ���ͨ�^�{(di��o)��(ji��)�λ��R6�{(di��o)��1602Һ���@ʾ�Č��ȶȡ�
1.2���w�·ԭ��
�D1.22 �·ԭ��D
ԭ���f�����£�
�ٴ��y��̖��P1(��):P4(ؓ(f��))ݔ�롣
��ͨ�^2SC3355���O���M(j��n)����̖�Ŵ�
��ʹ��74HC14ʩ�����|�l(f��)�������M(j��n)�ж�N�������}�_���ε��D(zhu��n)�Q������(y��u)����
���}�_�����M(j��n)��74HC390���yӋ(j��)��(sh��)���M(j��n)��100���l��
��δ���l�}�_��100���l�}�_�քe�M(j��n)���Ƭ�C(j��)�ăɂ�(g��)���r(sh��)/Ӌ(j��)��(sh��)������(j��ng)�^ܛ���㷨̎�����a(ch��n)�����y��̖�l�ʔ�(sh��)ֵ��
�ތ��˔�(sh��)ֵͨ�^LCD1602Һ���@ʾģ�K�M(j��n)��ݔ����
2 ܛ���㷨��(sh��)�F(xi��n)
���������f�����·ԭ���У���δ���l�}�_��100���l�}�_�քe�M(j��n)���Ƭ�C(j��)�ăɂ�(g��)���r(sh��)/Ӌ(j��)��(sh��)������(j��ng)�^ܛ���㷨̎�����a(ch��n)�����y��̖�l�ʔ�(sh��)ֵ�����o�Ɇ������P(gu��n)�I�ĭh(hu��n)��(ji��)���ڴˌ���Ԕ��(x��)�f����
�ٶ��r(sh��)����ʼ������(sh��)
void timer_init(void) //���r(sh��)/Ӌ(j��)��(sh��)����ʼ��
{
TMOD=0x66; //Ӌ(j��)��(sh��)��0��Ӌ(j��)��(sh��)��1����������ʽ2���Ԅ����b��ֵ
TH0=0; //Ӌ(j��)��(sh��)����ֵ��0
TL0=0;
TR0=1; //Ӌ(j��)��(sh��)���_ʼӋ(j��)��(sh��)
ET0=1; //���_Ӌ(j��)��(sh��)��0�Д�
TH1=0; //Ӌ(j��)��(sh��)����ֵ��0
TL1=0;
TR1=1; //Ӌ(j��)��(sh��)���_ʼӋ(j��)��(sh��)
ET1=1; //���_Ӌ(j��)��(sh��)��1�Д�
RCAP2H=(65536-62500)/256; //�ڳ����ʼ���ĕr(sh��)��oRCAP2L��RCAP2H�xֵ��
RCAP2L=(65536-62500)%256; //TH2��TL2�������Д�a(ch��n)���r(sh��)�Ԅ�ʹTH2=RCAP2H,TL2=RCAP2L��
TH2=RCAP2H; //12M������ÿ���Д�62.5ms(1s=1000ms=62.5ms��16)
TL2=RCAP2L;
ET2=1; //���_���r(sh��)��2��
TR2=1; //���r(sh��)��2�_ʼӋ(j��)�r(sh��)
EA=1; //�_����
}
��3 TMOD�Ĵ���
�ɱ�3��֪��TMOD=0x66=0110 0110B����TR0(Ӌ(j��)��(sh��)��0)��TR1(Ӌ(j��)��(sh��)��1)���������ڷ�ʽ2�������Ԅ����b8λ��ֵ��
���⣬52��Ƭ�C(j��)���ж��r(sh��)��2�����Ĺ��ܱȶ��r(sh��)/Ӌ(j��)��(sh��)��0�Ͷ��r(sh��)/Ӌ(j��)��(sh��)��1Ҫ��(qi��ng)��ܶࡣ�������Ԅ����b16λ��ֵ�Ĺ��ܣ���ֵ�惦��16 λӋ(j��)��(sh��)�惦��RCAP2H (��8λ)��RCAP2L(��8λ)�У�ֻҪ�����ʼ���ĕr(sh��)��oRCAP2H��RCAP2L�xֵ�����Д�a(ch��n)���r(sh��)�����Ԅӈ�(zh��)��TH2=RCAP2H,TL2=RCAP2L���@��(g��)�Д������C�Z���б����Ş�52��Ƭ�C(j��)���еķ�ʽ5������interrupt 5����
ͨ�^Ӌ(j��)��õ���Ҫ�ھ����12MHz�ėl����ÿ62.5ms�M(j��n)��һ��Ӌ(j��)�r(sh��)�Д���Ҫ��RCAP2H: RCAP2L�b�d��ֵ62500���x��62.5ms��ԭ����62.5ms��16=1000ms=1s���@�Ӽȿ�ͨ�^��(zh��n)�_�y��Ӌ(j��)��16��(g��)Ӌ(j��)�r(sh��)�Д����ڃ�(n��i)��TR0��TR1�ϲ��@�ˎׂ�(g��)�}�_��Ϣ�������y��̖���l��ֵ��
���Дຯ��(sh��)
void timer2(void) interrupt 5 //���r(sh��)��2��(62.5ms)
{
time++;
TF2=0; //���r(sh��)��2���Д���(bi��o)־λTF2���܉���Ӳ�����㣬����Ҫ���Д����(w��)�����Ќ�������
if (time==16) //���r(sh��)1s�r(sh��)�g��
{
time=0; //Ӌ(j��)�r(sh��)��0
EA=0; //�P(gu��n)��
fre=(long)count1*256+TL1; //count*256��(qi��ng)���D(zhu��n)�Q��long�ͣ���t�����a(ch��n)���M(j��n)λ ���Д���l��(Ӌ(j��)��(sh��)��1)
FLAG = 0;
if(fre<2000)//�������200KHz�t�xȡ���lǰ(Ӌ(j��)��(sh��)��0)�l��(200K��100=2000)
{
fre = (long)count*256+TL0;
FLAG = 1;
}
if(!FLAG)
{
fre = fre *100;//100���l
}
TL0=0; //����Ӌ(j��)��(sh��)��0Ӌ(j��)��(sh��)
TH0=0;
TL1=0;
TH1=0;
count=0; //����Ӌ(j��)��(sh��)��0Ӌ(j��)��(sh��)
count1=0;
EA=1; //�_�Д�
}
}
//----------------------------------------------------------------
void timer0(void) interrupt 1 //Ӌ(j��)��(sh��)��0�Д�(100���lǰ)
{
count++;
}
//----------------------------------------------------------------
void timer1(void) interrupt 3 //Ӌ(j��)��(sh��)��1�Д�(100���l��)
{
count1++;
}
�������ĵķ�����ͨ�^׃��time���ƶ��r(sh��)��2ÿ16��(g��)62.5ms����1s�M(j��n)��һ���Дࡣ�M(j��n)���Д�������TR1���}�_Ӌ(j��)��(sh��)ֵ����fre = (long)count*256+TL1;���ĺ��x�ǣ�count��1sӋ(j��)�r(sh��)���r(sh��)�r(sh��)TL1�ڴ����ڃ�(n��i)���b��ֵ�ĴΔ�(sh��)����TR1���Д�Δ�(sh��)������ֵ����256�ټ��϶��r(sh��)��2�Д�˲�gTL1��ֵ��������ڃ�(n��i)TR1���@���}�_�Ĝ�(zh��n)�_��(sh��)������Ҫע����ǣ�fre��long���׃�������茢count��(qi��ng)���R�r(sh��)�D(zhu��n)�Q��long��ͣ���t�c256��˺�����8λ���ֹ�(ji��)׃��������e(cu��)�`��
����(j��ng)�^���������l(f��)�F(xi��n)fre�Ĕ�(sh��)ֵ����200KHz��100���lֵ��2000Hz���t����(j��)�M��Ҏ(gu��)�ܷ��l����`���ԭ�t���چ�Ƭ�C(j��)��̎�����l�ʷ�����(n��i)�M(j��n)�в�������ʹ��TR0�ϲ��@��1s��(n��i)δ���lԭʼ�}�_��̖���_(d��)�Ĕ�(sh��)����fre�M(j��n)���xֵ��������ע�����(xi��ng)ͬ�ϡ�
�������һ��TR0��TR1Ӌ(j��)��(sh��)ֵ�����´��_���Д࣬�ȴ����ڵ��l�ʔ�(sh��)ֵ׃���ij��F(xi��n)��
��������(sh��)
void main()
{
unsigned char i;
LCD_init();
timer_init(); //���r(sh��)/Ӌ(j��)��(sh��)����ʼ��
for(i = 0;i<4;i++)
{
LCD_disp_char(i+0,1,character_1[ i]);
}
while(1)
{
dis_num(); //�@ʾ
delay_1s();
}
}
������(sh��)����Ҫ�΄�(w��)�����M(j��n)�и��N��ʼ�����_���o��ѭ�h(hu��n)�z�yݔ����̖�l��ֵ��׃����ͨ�^��׃fre��ֵ��LCD1602�ϱ��F(xi��n)�������ڟo��̖ݔ�����r�£���ʼ������(sh��)��LCD1602���@ʾ���ַ��̶��顰fre= Hz������
3 �Y(ji��)Փ
��(sh��)Ӗ(x��n)����KĿ����ȫ����ߌW(xu��)�����I(y��)���|(zh��)����K�_(d��)���W(xu��)���M��͘I(y��)����I(y��)�M�����˵�Ŀ�ġ������Č�(sh��)Ӗ(x��n)��������(y��ng)ԓ�Ǵ�W(xu��)������һ��(g��)��Ҫ�M�ɲ��֡��@�εČ�(sh��)Ӗ(x��n)�c������ͬ������С�M���λ���M(j��n)�еģ���������һ��(g��)����Ŭ�����������˽M�T�Ď���������׃���Зl���˲��٣�����呟����҂��M�T֮�g�ąf(xi��)������������˂�(g��)�˵ĈF(tu��n)�(du��)�������R���҂��Ժ��挦һ��(g��)��I(y��)�ķՇ��r(sh��)���������^��ɡ�
�@�Ό�(sh��)Ӗ(x��n)�҂�ʹ�õ��dž�Ƭ�C(j��)ϵ�y(t��ng)�����ڮ�(d��ng)ǰ������Ӄx���ѽ�(j��ng)�ڮ�(d��ng)�������Пo̎���ڵ���r�£�������S��Ӌ(j��)��C(j��)�I(l��ng)���У��҂�����Ҫ����Ƭ�C(j��)�M(j��n)���M(j��n)һ�����˽�����գ���협�(y��ng)�r(sh��)���ij�������Ŀǰ���Ҳ��Ҫ�����ļ��g(sh��)���˲ţ����҂��@Щ��ʮһ���o(j��)�Ĵ�W(xu��)�������Ժ����M(j��n)�и����ؕ�I(xi��n)��
����@�εČ�(sh��)Ӗ(x��n)���҂��п��fǧ���Ĵ_�����x�}�����������{(di��o)ԇ��Փ�ģ�ÿһ��(g��)�h(hu��n)��(ji��)�������҂�Ŭ���ĺ�ˮ�������ǬF(xi��n)���Ǵ����@��(g��)�P(gu��n)�I�ĕr(sh��)�ڣ��҂��M�TҲ�����Լ�������Ҫæ�����еĿ��У��ҹ������ҹ������y���о���һ��ęC(j��)�������Ǻ��o�Ɇ����҂�?n��i)������������΄?w��)�������ЌW(xu��)��������Փ�Ϻ͞���̎���ϵ�֪�R�����҂��Ժ�İl(f��)չ�����ˌ��F�Ľ�(j��ng)�(y��n)��ͨ�^�@�Ό�(sh��)Ӗ(x��n)���҂������ˈF(tu��n)�(du��)����Ҫ�ԣ���һ����Փ���ڌ�(sh��)�`֮�У���������ˌ�(sh��)�`�����̈́���������
�x �o
��(sh��)Ӗ(x��n)�R���Y(ji��)���ˣ��ڶ̕��Č�(sh��)Ӗ(x��n)�^���еõ����ώ��ͺܶ�ͬ�W(xu��)�Ď������������ĸ��x�����A���w�l(f��)�ܺ����G����λ�ώ���Ϥ��ָ��(d��o)�͟�����������҂�С�M����^���нo�Դ����Ď������҂��W(xu��)�����S����(sh��)�`��֪�R���_����۽磬����(qi��ng)���҂��Č�(sh��)�`�����������Լ��҂��ĈF(tu��n)�(du��)��������ͬ�r(sh��)��߀Ҫ���xȫ��ͬ�W(xu��)���҂�С�M�Ĵ����������҂��ڶ��յĺ��L(f��ng)�����춼��M�˸Ʉţ�����]���������҂����܉���ɵ��@ô���������֮�⣬�҂�С�M�ĽM�T���зֹ���ͨ���������˴˻����f(xi��)���������ĵط����һ��ӑՓ���������y�r(sh��)���һ���Q�����������@�NС�M�ķՇ����҂����܉���K㡱M�ص�����@һ��(g��)��(sh��)Ӗ(x��n)�΄�(w��)�����^�����҂��r(sh��)�g��ˮƽ���ޣ�����Ʒ��Ȼ�кܶ�ȱ���Ͳ���ĵط�����Ո�ώ���ͬ�W(xu��)���uָ����
�����īI(xi��n)
[1] ���. ���܃x���O(sh��)Ӌ(j��)���A(ch��). ���A��W(xu��)�����磬2005.
[2] �̵¸����־�. ���܃x�����ڶ��棩. �C(j��)е���I(y��)�����磬2009.
[3] ���t�£��w����. ��Ƭ�C(j��)ԭ���c�ӿڼ��g(sh��)��(y��ng)�ý̳�. ���A��W(xu��)�����磬2010.
[4] �T�Ə�(qi��ng). C�Z�Գ����O(sh��)Ӌ(j��)�������棩. ���A��W(xu��)�����磬2005.
[5] ������. 8051��Ƭ�C(j��)C�Z�Գ����O(sh��)Ӌ(j��)�c��(sh��)������. ���A��W(xu��)�����磬2009.
�� �1
���鱾�·��PCB(Printed Circuit Board��ӡ���·��)��
�D.���PCB
���n�O(sh��)Փ�Č���(y��ng)�������O(sh��)Ӌ(j��)�Y�����d���������湤���ļ� Դ�a�ȣ���
http://m.raoushi.com/bbs/dpj-77186-1.html


 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664