
1.結(jié)構(gòu)形式
直升機在巧妙使用總距控制和周期變距控制之前,四旋翼結(jié)構(gòu)被認(rèn)為是一種最簡單和最直觀的穩(wěn)定控制形式。但由于這種形式必須同時協(xié)調(diào)控制四個旋翼的狀態(tài)參數(shù),這對駕駛員認(rèn)為操縱來說是一件非常困難的事,所以該方案始終沒有真正在大型直升機設(shè)計中被采用。這里四旋翼飛行器重新考慮采用這種結(jié)構(gòu)形式,主要是因為總距控制和周期變距控制雖然設(shè)計精巧,控制靈活,但其復(fù)雜的機械結(jié)構(gòu)卻使它無法再小型四旋翼飛行器設(shè)計中應(yīng)用。另外,四旋翼飛行器的旋翼效率相對很低,從單個旋翼上增加拉力的空間是非常有限的,所以采用多旋翼結(jié)構(gòu)形式無疑是一種提高四旋翼飛行器負(fù)載能力的最有效手段之一。至于四旋翼結(jié)構(gòu)存在控制量較多的問題,則有望通過設(shè)計自動飛行控制系統(tǒng)來解決。四旋翼飛行器采用四個旋翼作為飛行的直接動力源,旋翼對稱分布在機體的前后、左右四個方向,四個旋翼處于同一高度平面,且四個旋翼的結(jié)構(gòu)和半徑都相同,旋翼1和旋翼3逆時針旋轉(zhuǎn),旋翼2和旋翼4順時針旋轉(zhuǎn),四個電機對稱的安裝在飛行器的支架端,支架中間空間安放飛行控制計算機和外部設(shè)備。四旋翼飛行器的結(jié)構(gòu)形式如圖1.1所示。
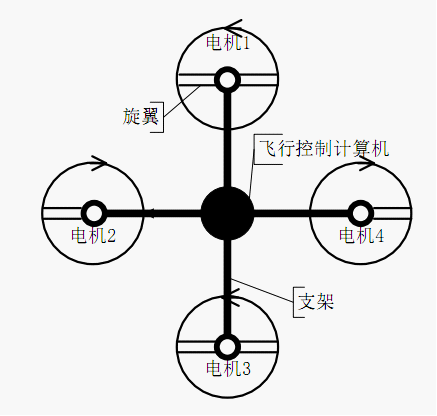
圖1.1四旋翼飛行器的結(jié)構(gòu)形式 2.工作原理典型的傳統(tǒng)直升機配備有一個主轉(zhuǎn)子和一個尾槳。他們是通過控制舵機來改變螺旋槳的槳距角,從而控制直升機的姿態(tài)和位置。四旋翼飛行器與此不同,是通過調(diào)節(jié)四個電機轉(zhuǎn)速來改變旋翼轉(zhuǎn)速,實現(xiàn)升力的變化,從而控制飛行器的姿態(tài)和位置。由于飛行器是通過改變旋翼轉(zhuǎn)速實現(xiàn)升力變化,這樣會導(dǎo)致其動力部穩(wěn)定,所以需要一種能夠長期保穩(wěn)定的控制方法。四旋翼飛行器是一種六自由度的垂直升降機,因此非常適合靜態(tài)和準(zhǔn)靜態(tài)條件下飛行。但是四旋翼飛行器只有四個輸入力,同時卻有六個狀態(tài)輸出,所以它又是一種欠驅(qū)動系統(tǒng)。
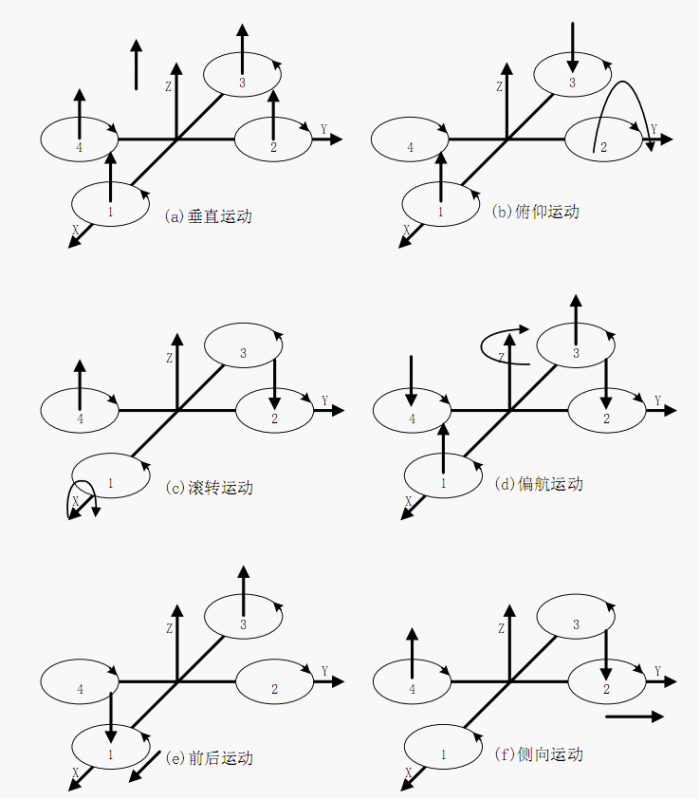
圖1.2四旋翼飛行器沿各自由度的運動 四旋翼飛行器結(jié)構(gòu)形式如圖所示,電機1和電機3逆時針旋轉(zhuǎn)的同時,電機2和電機4順時針旋轉(zhuǎn),因此當(dāng)飛行器平衡飛行時,陀螺效應(yīng)和空氣動力扭矩效應(yīng)均被抵消。與傳統(tǒng)的直升機相比,四旋翼飛行器有下列優(yōu)勢:各個旋翼對機身所施加的反扭矩與旋翼的旋轉(zhuǎn)方向相反,因此當(dāng)電機1和電機3逆時針旋轉(zhuǎn)的同時,電機2和電機4順時針旋轉(zhuǎn),可以平衡旋翼對機身的反扭矩。 四旋翼飛行器在空間共有6個自由度(分別沿3個坐標(biāo)軸作平移和旋轉(zhuǎn)動作),這6個自由度的控制都可以通過調(diào)節(jié)不同電機的轉(zhuǎn)速來實現(xiàn)。基本運動狀態(tài)分別是:(1)垂直運動;(2)俯仰運動;(3)滾轉(zhuǎn)運動;(4)偏航運動;(5)前后運動;(6)側(cè)向運動。在圖3.2中,電機1和電機3作逆時針旋轉(zhuǎn),電機2和電機4作順時針旋轉(zhuǎn),規(guī)定沿x軸正方向運動稱為向前運動,箭頭在旋翼的運動平面上方表示此電機轉(zhuǎn)速提高,在下方表示此電機轉(zhuǎn)速下降。 (1)垂直運動:垂直運動相對來說比較容易。在圖中,因有兩對電機轉(zhuǎn)向相反,可以平衡其對機身的反扭矩,當(dāng)同時增加四個電機的輸出功率,旋翼轉(zhuǎn)速增加使得總的拉力增大,當(dāng)總拉力足以克服整機的重量時,四旋翼飛行器便離地垂直上升;反之,同時減小四個電機的輸出功率,四旋翼飛行器則垂直下降,直至平衡落地,實現(xiàn)了沿z軸的垂直運動。當(dāng)外界擾動量為零時,在旋翼產(chǎn)生的升力等于飛行器的自重時,飛行器便保持懸停狀態(tài)。保證四個旋翼轉(zhuǎn)速同步增加或減小是垂直運動的關(guān)鍵。 (2)俯仰運動:在圖(b)中,電機1的轉(zhuǎn)速上升,電機3的轉(zhuǎn)速下降,電機2、電機4的轉(zhuǎn)速保持不變。為了不因為旋翼轉(zhuǎn)速的改變引起四旋翼飛行器整體扭矩及總拉力改變,旋翼1與旋翼3轉(zhuǎn)速該變量的大小應(yīng)相等。由于旋翼1的升力上升,旋翼3的升力下降,產(chǎn)生的不平衡力矩使機身繞y軸旋轉(zhuǎn)(方向如圖所示),同理,當(dāng)電機1的轉(zhuǎn)速下降,電機3的轉(zhuǎn)速上升,機身便繞y軸向另一個方向旋轉(zhuǎn),實現(xiàn)飛行器的俯仰運動。 (3)滾轉(zhuǎn)運動:與圖b的原理相同,在圖c中,改變電機2和電機4的轉(zhuǎn)速,保持電機1和電機3的轉(zhuǎn)速不變,則可使機身繞x軸旋轉(zhuǎn)(正向和反向),實現(xiàn)飛行器的滾轉(zhuǎn)運動。 (4)偏航運動:四旋翼飛行器偏航運動可以借助旋翼產(chǎn)生的反扭矩來實現(xiàn)。旋翼轉(zhuǎn)動過程中由于空氣阻力作用會形成與轉(zhuǎn)動方向相反的反扭矩,為了克服反扭矩影響,可使四個旋翼中的兩個正轉(zhuǎn),兩個反轉(zhuǎn),且對角線上的來年各個旋翼轉(zhuǎn)動方向相同。反扭矩的大小與旋翼轉(zhuǎn)速有關(guān),當(dāng)四個電機轉(zhuǎn)速相同時,四個旋翼產(chǎn)生的反扭矩相互平衡,四旋翼飛行器不發(fā)生轉(zhuǎn)動;當(dāng)四個電機轉(zhuǎn)速不完全相同時,不平衡的反扭矩會引起四旋翼飛行器轉(zhuǎn)動。在圖d中,當(dāng)電機1和電機3的轉(zhuǎn)速上升,電機2和電機4的轉(zhuǎn)速下降時,旋翼1和旋翼3對機身的反扭矩大于旋翼2和旋翼4對機身的反扭矩,機身便在富余反扭矩的作用下繞z軸轉(zhuǎn)動,實現(xiàn)飛行器的偏航運動,轉(zhuǎn)向與電機1、電機3的轉(zhuǎn)向相反。 (5)前后運動:要想實現(xiàn)飛行器在水平面內(nèi)前后、左右的運動,必須在水平面內(nèi)對飛行器施加一定的力。在圖e中,增加電機3轉(zhuǎn)速,使拉力增大,相應(yīng)減小電機1轉(zhuǎn)速,使拉力減小,同時保持其它兩個電機轉(zhuǎn)速不變,反扭矩仍然要保持平衡。按圖b的理論,飛行器首先發(fā)生一定程度的傾斜,從而使旋翼拉力產(chǎn)生水平分量,因此可以實現(xiàn)飛行器的前飛運動。向后飛行與向前飛行正好相反。當(dāng)然在圖b圖c中,飛行器在產(chǎn)生俯仰、翻滾運動的同時也會產(chǎn)生沿x、y軸的水平運動。 (6)傾向運動:在圖f中,由于結(jié)構(gòu)對稱,所以傾向飛行的工作原理與前后運動完全一樣。
| 



 [復(fù)制鏈接]
[復(fù)制鏈接]






 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

