|
|
想搞個如掃地機器人那樣的小剪草機,扔到果園里,讓它自己去剪草。
剪草路線就搞成從右近位依次剪到左遠(yuǎn)位。
小車已經(jīng)有樣機了,現(xiàn)在要搞控制板了。
遙控和攝像系統(tǒng)與控制板系統(tǒng)各自獨立,互不干涉。電機就用普通的電動三輪車的。
先搞控制板程序,接著要搞外圍接口電路,
開始寫程序才發(fā)現(xiàn),原來的需求有太多問題,先改了一下,還是不滿意,傳上來,希望大家?guī)托薷摹?br />

1300.jpg (30.74 KB, 下載次數(shù): 32)
下載附件
2019-2-14 18:26 上傳
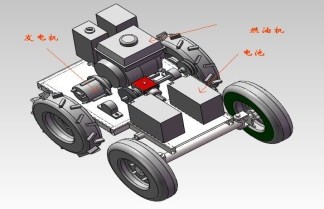
如圖,小車的兩個后輪安裝在差速器后橋上。后橋自帶一個24V500W直流電機,作為小車前進后退的動力。 兩個前輪由電推桿控制轉(zhuǎn)向。
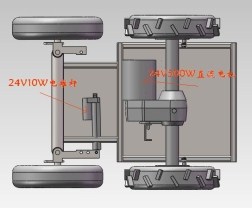
小車自帶燃油機負(fù)責(zé)剪草和發(fā)電機的動力。發(fā)電機給電池隨時供電。
整車外圍有一圈護欄,護欄上裝有接觸開關(guān)(障礙開關(guān))。
1.89C52單片機控制板。2.與控制板連接的外圍傳感開關(guān)及LED狀態(tài)顯示板。3.遙控系統(tǒng)。4.無線攝像頭。
三.關(guān)于89C52控制板的要求:
委托制作一塊89C52控制板,該控制板應(yīng)完成下面需求中提到的控制要求,并提供C語言編寫的程序代碼。(代碼可讀性強)
控制板要有七個獨立的輸入節(jié)點,用來接收外圍傳感器發(fā)來的低電平有效信號。要有七個獨立輸出節(jié)點,用來輸出低電平有效控制信號。
七個輸入節(jié)點名稱:
1電壓節(jié)點(voltage) 2油位節(jié)點(oil)
3電機過載節(jié)點(hot) 4中點節(jié)點(zero)
5刀片旋轉(zhuǎn)節(jié)點(rotate) 6前障礙節(jié)點(f_obstacle)
7后障礙節(jié)點(p_obstacle)
六個輸出控制信號名稱:
1熄火信號(stalling) 2前進信號(go)
3后退信號(back) 4 左轉(zhuǎn)向信號(left)
5右轉(zhuǎn)向信號(right) 6油門信號(add_oil)
開機上電前先由人工完成電壓、油位檢測后,電啟動。
開機上電。上電后下面1~3項的節(jié)點應(yīng)處于實時檢測狀態(tài),一旦有信號輸入,控制板應(yīng)控制、輸出相應(yīng)信號。
(1)電池電壓檢測:控制板實時監(jiān)測電壓節(jié)點,低電平為電量不足,控制板輸出熄火信號,同時取消其它所有輸出信號,等待。
(2)油位檢測:油位節(jié)點低電平,控制板輸出熄火信號,同時取消其它所有輸出信號,等待。
(3)電機過載檢測:電機過載節(jié)點低電平持續(xù)3秒,則輸出熄火信號,同時取消其它所有輸出信號,等待。
(4)行走、中點檢測:
控制板輸出前進信號,同時輸出左轉(zhuǎn)向信號,同時檢測中點節(jié)點低電平有效輸入信號。
如檢測到中點信號,則取消左轉(zhuǎn)信號輸出。進入第5項。
如3秒內(nèi)未檢測到中點信號,則取消左轉(zhuǎn)信號,同時輸出右轉(zhuǎn)向信號,同時檢測中點信號。
如6秒內(nèi)檢測到中點信號,則取消右轉(zhuǎn)信號輸出。進入第5項。
如6秒內(nèi)未檢測到中點信號,則輸出熄火信號,同時取消其它所有輸出信號,等待。
(5)刀片旋轉(zhuǎn)檢測:
輸出油門信號,3秒后開始檢測刀片旋轉(zhuǎn)節(jié)點低電平有效信號。
如檢測不到低電平,進入第6項。
如檢測到刀片旋轉(zhuǎn)節(jié)點低電平,則取消前進信號,1秒后輸出后退信號,
5秒后仍檢測到低電平,則輸出熄火信號,同時取消其它所有輸出信號,等待。
如5秒后檢測不到低電平,則取消后退信號,1秒后輸出前進信號,進入第6項。
(6)前、后障礙檢測。開機后同時開始檢測前、后障礙節(jié)點。
如檢測到前障礙節(jié)點低電平有效信號,控制板取消所有輸出信號,1秒后輸出后退信號同時輸出左轉(zhuǎn)向信號, 3秒后取消左轉(zhuǎn)向信號,輸出右轉(zhuǎn)向信號,同時開始檢測中點節(jié)點,
如檢測到中點信號,則取消右轉(zhuǎn)向信號,6秒后取消后退信號,1秒后輸出前進信號。
如6秒內(nèi)未檢測到中點信號,則輸出熄火信號,同時取消其它所有輸出信號,等待。
如檢測到前、后障礙節(jié)點信號出現(xiàn)的間隔時間少于9秒,則輸出熄火信號,同時取消其它所有輸出信號,等待。
完整的Word格式文檔51黑下載地:
 電驅(qū)小車控制需求(改進1).doc
(109 KB, 下載次數(shù): 8)
電驅(qū)小車控制需求(改進1).doc
(109 KB, 下載次數(shù): 8)
2019-2-14 18:25 上傳
點擊文件名下載附件
|
|










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
