���M(j��n)늙C(j��)��(sh��)�H����һ��(g��)��(sh��)��/�Ƕ��D(zhu��n)�Q����Ҳ��һ��(g��)���еĔ�(sh��)/ģ�D(zhu��n)�Q������ˣ���Ѳ��еĶ��M(j��n)���D(zhu��n)�Q�ɴ��е��}�_���У�����(sh��)�F(xi��n)������ơ�ÿ��(d��ng)���M(j��n)늙C(j��)�}�_ݔ�뾀�ϵõ�һ��(g��)�}�_�����������ض��ķ�����һ����
�O(sh��)Ӌ(j��)Ҫ��
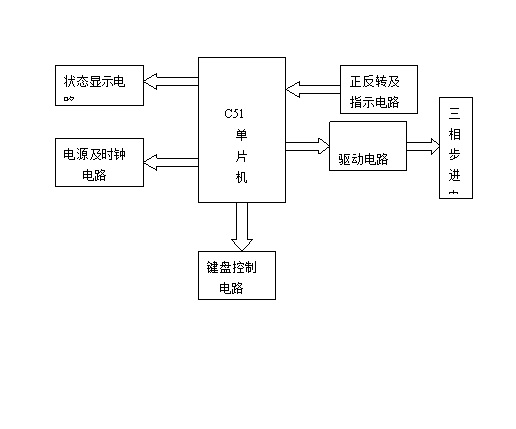
���Æ�Ƭ�C(j��)������һ��(g��)���������ĵIJ��M(j��n)늙C(j��)���������M(j��n)늙C(j��)�����D(zhu��n)�����������D(zhu��n)������̖(h��o)�����ơ����M(j��n)늙C(j��)�IJ���(sh��)���I�Pݔ�룬��ݔ��IJ���(sh��)�քe��3��6��9��12��15��18��21��24��27���������I�P�����I�P�i�Ĺ��ܣ���(d��ng)�I�P���i�ĕr(sh��)���M(j��n)늙C(j��)�Dz�����ݔ�벽��(sh��)�ģ�Ҳ����(hu��)�\(y��n)�D(zhu��n)��ֻ�Ю�(d��ng)�I�P�i���_��ݔ�벽��(sh��)�ĕr(sh��)���M(j��n)늙C(j��)���_ʼ���� ��늙C(j��)�\(y��n)�D(zhu��n)�ĕr(sh��)�������D(zhu��n)�ͷ��D(zhu��n)ָʾ��ָʾ����(d��ng)늙C(j��)���\(y��n)�D(zhu��n)���^�̮�(d��ng)�У�����^�ᣬ�t늙C(j��)ֹͣ�\(y��n)�D(zhu��n)��ͬ�r(sh��)�tɫָʾ����.��ͬ�r(sh��)����(b��o)푡�
Ŀ�
1���wՓ4
2������Փ�C��Ҏ(gu��)�����x����7
3�������f�����O(sh��)Ӌ(j��)��7
4��Ӳ�������O(sh��)Ӌ(j��)8
5��ܛ�������O(sh��)Ӌ(j��)12
6���{(di��o)ԇ13
7�����g(sh��)�Y(ji��)���Y(ji��)���Z��14
8�������īI(xi��n)15
9����䛣�Դ������a���·�D�ȣ�16
1. �wՓ 1.1���M(j��n)늙C(j��)������}�_��̖(h��o)���ƣ��Ԍ�(sh��)�F(xi��n)��(du��)���a(ch��n)�^�̻��O(sh��)��Ĕ�(sh��)�ֿ��ƣ������^�̿�����һ�Nʮ����Ҫ�ͳ��õĹ��ʈ�(zh��)���������������}�_��̖(h��o)�D(zhu��n)�Q�ɽ�λ�ƣ����ҿ�����늴��Ƅ�(d��ng)݆��늴Ų�������λ�ưl(f��)�����ȣ����������Ӌ(j��)��C(j��)��(y��ng)�ü��g(sh��)��Ѹ�ٰl(f��)չ�����M(j��n)늙C(j��)������Ӌ(j��)��C(j��)һ��M�ɸ߾��ȵĔ�(sh��)�ֿ���ϵ�y(t��ng)�����������ɔ�(sh��)���}�_���ƣ���˷dz��m�����Æ�Ƭ�C(j��)���ƣ����O(sh��)Ӌ(j��)�����ڴ˻��A(ch��)�ϣ�AT89C51�͆�Ƭ�C(j��)����ģ����Y(ji��)������·�Բ��M(j��n)늙C(j��)����ƌ�(du��)��Ŀ���ϵ�y(t��ng)��
1.2��Ƭ�C(j��)���Ʋ��M(j��n)늙C(j��)ԭ�� ���M(j��n)늙C(j��)�IJ�ͬ�(q��)��(d��ng)��ʽ�������ڹ����r(sh��)���}�_��̖(h��o)��һ�����݆���ӵ������@�M�ϣ��Ķ���(sh��)�F(xi��n)��ͬ�Ĺ�����B(t��i)������ͨ����ͬ�����\(y��n)�з�ʽ�������������ġ������p���ĺ������Ρ��p�������N��ע�⣺���桰���������ġ��еġ����ࡱָ�����������@�M�����ġ���ָ�����@�M��׃һ��ͨ늷�ʽ�������ġ���ʾͨ��������һ��(g��)ѭ�h(hu��n)���������p���ġ��еġ��p����ָͬ�r(sh��)�Ѓ����@�Mͨ늣��� 1.2.1�����������\(y��n)�з�ʽ����퓈D��ʾ�鷴��(y��ng)ʽ���M(j��n)늄�(d��ng)�C(j��)����ԭ��D����ͨ�^�}�_������ݔ���ĵ�һ��(g��)�}�_ʹA���@�Mͨ늣�B,C���@�M��ͨ늣���A���@�Mͨ늺�a(ch��n)���Ĵň���ʹ�D(zhu��n)�� �Ϯa(ch��n)������(y��ng)�D(zhu��n)�أ��D(zhu��n)�ӵ�1��3�X���c���ӴŘO��(du��)�R������D��a����ʾ���ڶ���(g��)�}�_������ʹB���@�Mͨ늣���A��C���@�M��ͨ늣�B���@�M�a(ch��n)���Ĵň��� ʹ�D(zhu��n)�ӵ�2��4�X�cB��ŘO��(du��)�R����D��b����ʾ���c�D��a����ȣ��D(zhu��n)����r(sh��)ᘷ����D(zhu��n)��(d��ng)��һ��(g��)�Ƕȡ�������(g��)�}�_��������C���@�Mͨ늣��� A��B�ͨ늣��@�r(sh��)�D(zhu��n)�ӵ�1��3�X��(hu��)�cC�M��(du��)�R���D(zhu��n)�ӵ�λ����D��c)��ʾ���c�D��b)���^������r(sh��)��D(zhu��n)�^��һ��(g��)�Ƕȡ� 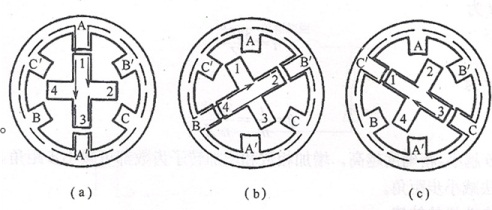
�D1.1 ����(y��ng)ʽ���M(j��n)늙C(j��)����ԭ��D ��(d��ng)�}�_���ൽ��r(sh��)��ͨ�^������ʹ���ӵ��@�M����A��--B��--C��--A�����Ҏ(gu��)�ɲ���ؽ�ͨ�c���_���@�r(sh��)���M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)�Ӿ��B�m(x��)��ͣ��һ��������r(sh��) ᘷ����D(zhu��n)��(d��ng)�������׃���M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)��(d��ng)����ֻҪ�����Ӹ��@�Mͨ늵����Ğ�A��--C��--B��--A�࣬�D(zhu��n)���D(zhu��n)��(d��ng)���Ğ�형r(sh��)ᘷ��� �����ķ��䷽ʽ�r(sh��)�����M(j��n)늄�(d��ng)�C(j��)��A��ͨ��D(zhu��n)�Q��B��ͨ늣����M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)���D(zhu��n)�^һ��(g��)�Ƕȣ��Q��һ�����@�r(sh��)�D(zhu��n)���D(zhu��n)�^�ĽǶ���30�ȡ����M(j��n)늄�(d��ng)�C(j��)ÿһ���D(zhu��n)�^�ĽǶȷQ�鲽��ǡ� 1.2.2�����p�����\(y��n)�з�ʽ�����p�����\(y��n)�з�ʽ��ÿ�ζ��Ѓɂ�(g��)�@�Mͨ늣�ͨ늷�ʽ��AB--BC--CA--AB���������ͨ����Ğ�AB--CA--BC--AB�����t���M(j��n)늙C(j��)���D(zhu��n)���p���ķ��䷽ʽ�r(sh��)�����M(j��n)늄�(d��ng)�C(j��)�IJ����Ҳ��30�� 1.2.3�����Σ��p�����\(y��n)�з�ʽ���������ķ��䷽ʽ����ÿ��(g��)���ڃ�(n��i)������(g��)ͨ늠�B(t��i)���@����ͨ늠�B(t��i)��������ʹA--AB--B--BC--C--CA--A��������A-- CA--C--BC--B--AB--A��������ͨ늷�ʽ�У���һ��(g��)�r(sh��)�̃ɂ�(g��)�@�Mͬ�r(sh��)ͨ늣��@�r(sh��)�D(zhu��n)���X��λ�Ì�λ��ͨ늵ă�������gλ�á����������ķ��� ��ʽ�£��D(zhu��n)��ÿһ���D(zhu��n)�^�ĽǶ�ֻ���������ķ�ʽ�µ�һ�룬�������15�ȡ� �������\(y��n)�е�ͻ�����}��ÿ��ֻ��һ���@�Mͨ늣����D(zhu��n)�Q�^���У�һ���@�M��늣���һ���@�Mͨ늣����װl(f��)��ʧ��������ο�һ���@�Mͨ������D(zhu��n)�ӣ���(w��n)���Բ��ã�������ƽ��λ�ø�����ʎ�����õ��^�١� �p�����\(y��n)�е����c(di��n)��ÿ�ζ��Ѓ����@�Mͨ늣������D(zhu��n)�Q�^����ʼ�K��һ���@�M����ͨ늠�B(t��i)����˹�����(w��n)�����Ҳ�����c��������ͬ�� �����\(y��n)�з�ʽ�D(zhu��n)�Q�r(sh��)ʼ�K��һ���@�Mͨ늣��Ҳ�����^С���ʹ�����(w��n)���Ժã����Դ�^��(f��)�s����(sh��)�H��(y��ng)���^�ࡣ
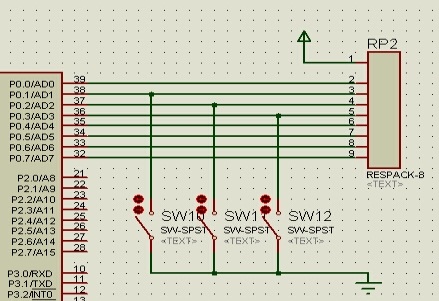
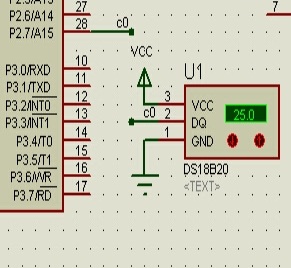
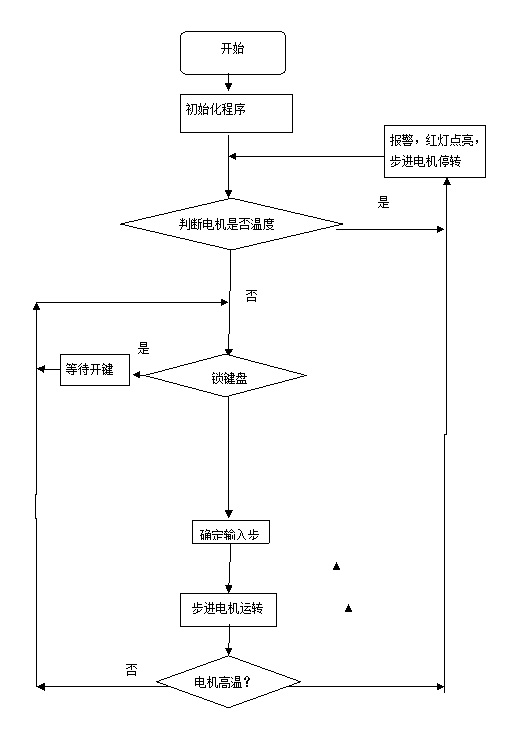
2.����Փ�C 2.1���O(sh��)Ӌ(j��)������Ҫ��(sh��)�F(xi��n)9��(g��)��ͬ����(sh��)��ݔ���Լ��������ܵ�ݔ�룬���Կ��Բ����I�Pݔ�룬��(sh��)�F(xi��n)���M(j��n)늙C(j��)�IJ���(sh��)���I�Pݔ���Ҿ����I�P�i���ܡ�������(sh��)�(y��n)��Ƭ�C(j��)�Ķ˿ڔ�(sh��)�����㣬���Q��ֱ�Ӳ����I�Pݔ�롣 2.2�ڲ��M(j��n)늙C(j��)�������ڴ˴��O(sh��)Ӌ(j��)��ܛ������proteus���ڴ�ܛ����ֻ��һ��(g��)���ಽ�M(j��n)늙C(j��)��ģ�ͣ�Ȼ�]�����M(j��n)늙C(j��)���Ʒ������y�����Q������������Ŀ��Ʒ������چ�Ƭ�C(j��)����ֱ���(q��)��(d��ng)���M(j��n)늙C(j��)��ͨ�^оƬ�Ŵ����늉��� 2.3�ڜy���ضȷ���һ�_ʼ������һ��(g��)�ضȂ������_�P(gu��n)ȥ��(sh��)�F(xi��n)�O(ji��n)�y늙C(j��)�Ĝضȣ���(d��ng)�ض��^�ߵĕr(sh��)��͔��_�_�P(gu��n)�������]��ϵ�y(t��ng)�Ŀɲ����ԣ���(zh��n)�_�ԣ����̵��y�Զȼ�����ܛ�������ƣ����Q����DS18B20����늙C(j��)�Ĝy��ϵ�y(t��ng)����(sh��)�F(xi��n)늙C(j��)���\(y��n)��(d��ng)�^���У�����^�ᣬ�t늙C(j��)ֹͣ�\(y��n)�D(zhu��n)��ͬ�r(sh��)�tɫָʾ������ͬ�r(sh��)��(b��o)�������D(zhu��n)�����ò�ͬ��ָʾ��ָʾ���D(zhu��n)�ͷ��D(zhu��n)����(d��ng)�ضȳ��^��ȫ�ضȕr(sh��)����(b��o)������(hu��)���͈�(b��o)��⏕�(hu��)�Q푣���늙C(j��)ֹͣ�\(y��n)�D(zhu��n)ͬ�r(sh��)�iס�I�P��
3.�����f�� ���M(j��n)늙C(j��)����ͨ늄�(d��ng)�C(j��)��֮ͬ̎�Dz��M(j��n)늙C(j��)�����}�_��̖(h��o)�Ŀ��ơ������M(j��n)늙C(j��)�nj���}�_��̖(h��o)�D(zhu��n)�Q��C(j��)е��λ�ƵĈ�(zh��)��Ԫ�������M(j��n)늙C(j��)�Ŀ��ƿ�����Ӳ����Ҳ������ܛ��ͨ�^��Ƭ�C(j��)��(sh��)�F(xi��n)��Ӳ�������Dz����}�_������оƬ�M(j��n)��ͨ�ÓQ����ƣ���ܛ���������Æ�Ƭ�C(j��)�a(ch��n)�������}�_�����Ʋ��M(j��n)늙C(j��)���\(y��n)�Р�B(t��i)���@�N�����ɺ����·�����ͳɱ��� ����ܛ�����ƕr(sh��)����Ҫ�O(sh��)Ӌ(j��)Ҫ�c(di��n)���£� - �Д����D(zhu��n)����
- ������_�������֣�
- �����ݔ������֣�
- �_�����Ʋ���(sh��)��ÿһ�����ӕr(sh��)�r(sh��)�g��
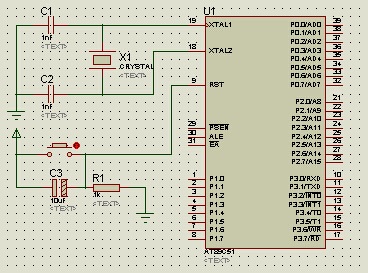
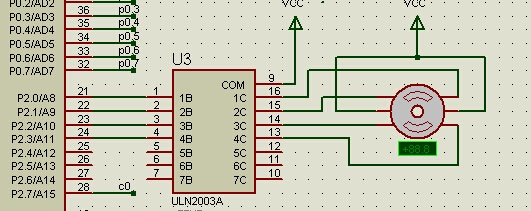
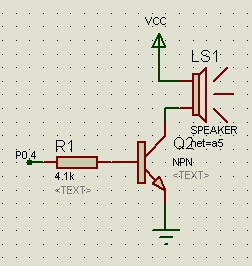
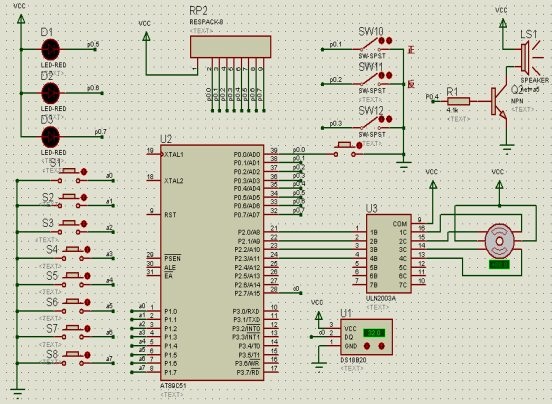
���چ�Ƭ�C(j��)���(q��)��(d��ng)���һ�㶼���^С������ֱ���(q��)��(d��ng)늙C(j��)���������Ԇ�Ƭ�C(j��)��I/O��ݔ����횽��(q��)��(d��ng)�·���������(q��)��(d��ng)���ŵ��Կ���늙C(j��)�������������ƿ�D���D��ʾ�� �_ʼ����(d��ng)�r(sh��)�c(di��n)��̎��ֹͣ�D(zhu��n)��(d��ng)��B(t��i)�����I�P���I�����I�P�i������(sh��)�����D(zhu��n)�����D(zhu��n)����80c51���鿂����оƬ��ULN2003���ڲ��M(j��n)늙C(j��)���(q��)��(d��ng)���ơ��������I�P���ƕr(sh��)���I�P������� �D3.1 �������D 4.Ӳ�������O(sh��)Ӌ(j��) ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��) 4.1��С��Ƭ�C(j��)ϵ�y(t��ng) 5V�Դ���oϵ�y(t��ng)��늡� ��(f��)λ�·���������w�r(sh��)��(f��)λ�·����ʹ�������(zh��)�У��ஔ(d��ng)����X���؆��� ���o��Ƭ�C(j��)�\(y��n)���ṩ�r(sh��)犡� EA�Ӹ��ƽ����ʾ�\(y��n)�Ѓ�(n��i)������惦(ch��)�����d�ij��� P0�����裺P0���_©�Y(ji��)��(g��u)��ʹ�Õr(sh��)һ������������ƽ�� 4.2�I�P�O(sh��)Ӌ(j��) ԓ�·�в��ê�(d��)���I�P������ʽ�����O(sh��)��ʮ����(g��)���I���քe��3,6��9��12��15,18,21,24,27�����x���ܣ��I�P�i�����Լ����M(j��n)늙C(j��)�D(zhu��n)��(d��ng)�����x���ܡ������г���Q�������á� 4.3���M(j��n)늙C(j��) ���M(j��n)늙C(j��)���(q��)��(d��ng)����ULN2003���ӵ���Ƭ�C(j��)��P1.0~P1.3����D���M(j��n)늙C(j��)�(q��)��(d��ng)�͆�Ƭ�C(j��)�B���D��
4.4�����D(zhu��n)�@ʾ���͈�(b��o)�����
4��5�ضȂ�����ģ�K 5.ܛ���O(sh��)Ӌ(j��) ���������̈D��ʾ���£� 6.�{(di��o)ԇ 6.1 Proteus����ܛ�� Proteus��������������EDA����(����ܛ��)����ԭ��D���D�����a�{(di��o)ԇ����Ƭ�C(j��)�c����·�f(xi��)ͬ���棬һ�I�ГQ��PCB�O(sh��)Ӌ(j��)��������(sh��)�F(xi��n)�ˏĸ���a(ch��n)Ʒ�������O(sh��)Ӌ(j��)����Ŀǰ������Ψһ���·����ܛ����PCB�O(sh��)Ӌ(j��)ܛ����̓�Mģ�ͷ���ܛ������һ���O(sh��)Ӌ(j��)ƽ�_(t��i)����̎����ģ��֧��8051��HC11��PIC10/12/16/18/24/30/DsPIC33��AVR��ARM��8086��MSP430�ȣ�2010����������Cortex��DSPϵ��̎�����������m(x��)��������ϵ��̎����ģ�͡��ھ��g���棬��Ҳ֧��IAR��Keil��MPLAB�ȶ�N���g���� 6.2 �{(di��o)ԇ���E������ ���·��(j��ng)�{(di��o)ԇ�����}ĿҪ���(xi��ng)���g(sh��)ָ��(bi��o)���_(d��)���O(sh��)Ӌ(j��)��Ŀ�ġ����w�������Ʒ������£� 1����(d��ng)늙C(j��)������(d��ng)���o�r(sh��)�����M(j��n)늙C(j��)����(j��)�ƶ�Ĭ�J(r��n)��B(t��i)�_ʼ�D(zhu��n)��(d��ng)�� 2����(d��ng)늙C(j��)����ֹͣ���o�r(sh��)�����M(j��n)늙C(j��)ֹͣ�D(zhu��n)��(d��ng)�� 3����(d��ng)늙C(j��)�������D(zhu��n)���o�r(sh��)�����M(j��n)늙C(j��)���D(zhu��n)�� 4����(d��ng)늙C(j��)���·��D(zhu��n)���o�r(sh��)�����M(j��n)늙C(j��)���D(zhu��n)�� 5�p��(d��ng)늙C(j��)���²���(sh��)���o�r(sh��)�����M(j��n)늙C(j��)����(j��)����(sh��)��(sh��)�F(xi��n)�D(zhu��n)��(d��ng)
7�����g(sh��)С�Y(ji��) ����һ�ܵĆ�Ƭ�C(j��)�n���O(sh��)Ӌ(j��)��æµ���ѽӽ�β����(j��ng)�^�@ô�����Ŭ�����K��������@���n���O(sh��)Ӌ(j��)�����O(sh��)Ӌ(j��)Ҫ���ڳ䌍(sh��)��Ҳ�W(xu��)���˺ܶ�֪�R(sh��)�������������W(xu��)֪�R(sh��)�\(y��n)���ڌ�(sh��)�`�е�һ�κܺõ��w�(y��n)��ʹ������˜\�����ڴ˴ο���Ҫ���Ǻܸߣ��x��51ϵ��80C51����������Ӳ���ӿڷ��䆖�}�����ȥ�(q��)��(d��ng)늙C(j��)����(du��)�ڲ��M(j��n)늙C(j��)֮ǰ�]��ʲô���|���������ϾW(w��ng)�����S���P(gu��n)�ڲ��M(j��n)늙C(j��)���Y�ϣ�֪�������������ԭ���Լ���ôȥ��(sh��)�F(xi��n)������\(y��n)�D(zhu��n)���(q��)��(d��ng)����������Ҫ���}������ξ���ȥ��(sh��)�F(xi��n)�������ˣ��@�γ���ľ������{(di��o)ԇ��(du��)�ҁ��f�ǂ�(g��)��С������(zh��n)����?y��n)�֮ǰֻ�����^һЩ���̵�С����(du��)�^��ij����w�Է���߀���ܺܺõİ��ա���(j��ng)�^����(f��)�ćLԇ���{(di��o)ԇ���ðl(f��)�F(xi��n)һ��(g��)���}����Qһ��(g��)���}�ķ�����߀������һЩ�e�˵Ľ�(j��ng)�(y��n)����������˳���ľ������@��(du��)���Ժ�������һ�κܺõĽ�(j��ng)�(y��n)�e�ۡ�ͨ�^�@���n���O(sh��)Ӌ(j��)����Ҳ�˽���Լ��IJ��㣬��ǰ�Լ��W(xu��)��(x��)��Ƭ�C(j��)�ĕr(sh��)������ֻȥ�����e�ˌ��ij����Ԟ鿴�����Լ���֪�����ˣ�����(sh��)�������@�ӣ��mȻ�@���n���O(sh��)Ӌ(j��)����������ˣ������ֵĵط��ܶ࣬���̲�������ǰ�J(r��n)��ĺ��Ρ��������Ժ�ČW(xu��)��(x��)�У������ָ��۵ͣ�һ��Ҫ�_̤��(sh��)�أ�һ�������ߣ��Լ���(d��ng)��ȥ�����@�Ӳ��܌�֪�R(sh��)�����W(xu��)���֡��@���n���O(sh��)Ӌ(j��)�ܵ��������ɣ�߀Ҫ���xë�ώ���ָ��(d��o)�����ܺ����һ�κܺõĽ�(j��ng)�(y��n)�e�ۺ��O(sh��)Ӌ(j��)��(j��ng)�v��
����D
��Ƭ�C(j��)Դ��������: - #include<reg51.h>
- #define uchar unsigned char
- #define uint unsigned int
- #define led P0//��(sh��)�a�ܶ��x
- #define haha P2
- sbit s1 = P0^1;
- sbit s2 = P0^2;//���I���x,s1���D(zhu��n)��s2���D(zhu��n)
- sbit s3 = P0^3;//���I���x��ֹͣ
- sbit speaker = P0^4;
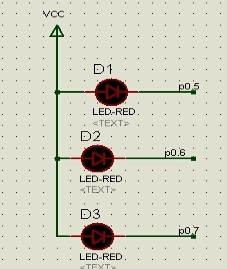
- sbit LED1 = P0^5;
- sbit LED2 = P0^6;
- sbit LED3 = P0^7;
-
- sbit a = P2^3;
- sbit b = P2^2;
- sbit c = P2^1;
- sbit d = P2^0;//�}�_��̖(h��o)ݔ��˶��x
-
- sbit _key3 =P1^0; //3��
- sbit _key6 =P1^1; //6��
- sbit _key9 =P1^2; //9��
- sbit _key12 =P1^3; //12��
- sbit _key15 =P1^4; //15��
- sbit _key18 =P1^5; //18��
- sbit _key21 =P1^6; //21��
- sbit _key24 =P1^7; //24��
- sbit _key27 =P0^0; //27��
-
- unsigned char code dofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// �@ʾ�δaֵ0~9
- unsigned char code dofly_WeiMa[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//�քe��(du��)��(y��ng)����(y��ng)�Ĕ�(sh��)�a���c(di��n)��,��λ�a
- unsigned char TempData[8]; //�惦(ch��)�@ʾֵ��ȫ��׃��
-
- /*------------------------------------------------
- DS18B20 �˿ڶ��x
- ------------------------------------------------*/
- sbit DQ=P2^7;//ds18b20 �˿�
- bit ReadTempFlag;//���x�x�r(sh��)�g��(bi��o)־
- /*------------------------------------------------
- ����(sh��)��
- ------------------------------------------------*/
- unsigned int ReadTemperature(void);
- bit Init_DS18B20(void);
- unsigned char ReadOneChar(void);
- void WriteOneChar(unsigned char dat);
- void DelayUs2x(unsigned char t);
- void DelayMs(unsigned char t);
- void _18b20(void);
- //DS18B20���x
- /*-----------------------------------------------*/
-
- uchar code display[11]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff};//��ꖔ�(sh��)�a���(q��)��(d��ng)��̖(h��o)0---9�����@ʾ
- uchar code time_counter[10][2]={{0xda,0x1c},{0xde,0xe4},{0xe1,0xec},{0xe5,0xd4},{0xe9,0xbc}, //9.7 ----1ms
- {0xed,0xa4},{0xf1,0x8c},{0xf5,0x74},{0xf9,0x5c},{0xfc,0x18}};
- uchar num1 = 0;//����ȡ��(l��)����̖(h��o)׃��
- uchar num2 = 8;
- uchar bushu = 0;
-
- uchar k=1;//�Ӝp�nλ���ƣ�1����С�n
- bit flag1 = 0;//��ʼ���D(zhu��n)�������D(zhu��n)��(bi��o)־
- uchar buf[4]={0,10,10,1};//��(sh��)�a���@ʾ���棬���D(zhu��n)�����@ʾ�����@ʾ���@ʾ1�nλ,��----�ͣ�����ȥ����
- void key(void);
- void keyscan(void);
- //================================���r(sh��)��0/1��ʼ������(sh��)================================
- void T0_T1_init()
- {
- TMOD = 0x11;//���r(sh��)��0/1�������ڷ�ʽ1,16λӋ(j��)�r(sh��)��ʽ
- TH0 = (65536 - 4000)/256;
- TL0 = (65536 - 4000)%256;//���r(sh��)��0�����r(sh��)4ms���ڔ�(sh��)�a�ܒ����@ʾ
- TH1 = time_counter[k-1][0];
- TL1 = time_counter[k-1][1];//���r(sh��)��1�����r(sh��)10ms���ڲ��M(j��n)늙C(j��)�D(zhu��n)�ٿ���
- TR0 = 1;
- TR1 = 1;
- ET0 = 1;
- ET1= 1;//�_���r(sh��)����
- EA = 1;//�_����
- }
- //================================ms��(j��)�ӕr(sh��)����(sh��)=======================================
- void delay1m(uint x)
- {
- uint i,j;
- for(i=0;i<x;i++) //�B��(sh��)x���s x ms
- for(j=0;j<120;j++); //��(sh��)120 ���s1 ms
- }
- //================================������(sh��)=============================================
- void main()
- {
- T0_T1_init();
- Init_DS18B20();
- //buf[1] = 10;//���@ʾ
- LED3 = 1; speaker =1;
- while(1)
- {
- if(s1 == 0)
- {
- delay1m(3);
- if(s1 == 0)
- {
- flag1 = 0;//���D(zhu��n)
- haha = 0x00;//ֹͣ
-
- }
- while(!s1);
- }
- if(s2 == 0)
- {
-
- delay1m(3);
- if(s2 == 0)
- {
- flag1 = 1;//���D(zhu��n)
- haha = 0x00;//ֹͣ
- }
- while(!s2);
- }
- if(s3 == 0) {
- delay1m(3);
- if(s3 == 0) {
- EA = 0;
- LED2 = 1;
- LED1 = 1;
- LED3 = 1; speaker =1;
- }
- }
- else {
- EA = 1;
- }
- key();
- _18b20();
- }
-
- }
- //==================================���r(sh��)��1�Дຯ��(sh��)�������}�_�l�ʿ���=====================================
- void time1_interrupt()interrupt 3
- {
- static num1 = 0;
- static num2 = 0;
- uchar m = 0;
- TH1 = time_counter[k-1][0];
- TL1 = time_counter[k-1][1];//���r(sh��)��1�����r(sh��)1 ���ڲ��M(j��n)늙C(j��)�D(zhu��n)�ٿ���
- m = bushu;
- for(;m > 0; m--) {
- if(flag1 == 0)//���D(zhu��n)
- {
- LED3 = 1;speaker =1;
- LED1 = 0;
- LED2 = 1;
- switch(num1)
- {
- case 0:a = 1;b = 0;c = 0;d = 0;break;
- case 1:a = 1;b = 1;c = 0;d = 0;break;
- case 2:a = 0;b = 1;c = 0;d = 0;break;
- case 3:a = 0;b = 1;c = 1;d = 0;break;
- case 4:a = 0;b = 0;c = 1;d = 0;break;
- case 5:a = 0;b = 0;c = 1;d = 1;break;
- case 6:a = 0;b = 0;c = 0;d = 1;break;
- case 7:a = 1;b = 0;c = 0;d = 1;break;
- }
- num1++;
- if(num1 == 8)num1 = 0;
- }
- else //���D(zhu��n)
- {
- LED3 = 1;speaker =1;
- LED1 = 1;
- LED2 = 0;
- switch(num2)
- {
- case 0:a = 1;b = 0;c = 0;d = 1;break;
- case 1:a = 0;b = 0;c = 0;d = 1;break;
- case 2:a = 0;b = 0;c = 1;d = 1;break;
- case 3:a = 0;b = 0;c = 1;d = 0;break;
- case 4:a = 0;b = 1;c = 1;d = 0;break;
- case 5:a = 0;b = 1;c = 0;d = 0;break;
- case 6:a = 1;b = 1;c = 0;d = 0;break;
- case 7:a = 1;b = 0;c = 0;d = 0;break;
- }
- num2++;
- if(num2 == 8)num2 = 0;
- }
- }
- }
-
- void key()
- {
- if(s3 == 1) //�@���_�P(gu��n)�]�ϣ���ʾ�I�P�i���_������_�P(gu��n)���]�ϣ���ʾ���i��늙C(j��)���D(zhu��n)
- {
- delay1m(100);
- if(s3 == 1) {
- if(_key27==0) bushu=27; //����(sh��)�ߵă�(y��u)�ȣ�������(g��)����(sh��)�_�P(gu��n)ͬ�r(sh��)���ϣ��\(y��n)�и߲���(sh��)
- else if(_key24==0) bushu=24;
- else if(_key21==0) bushu=21;
- else if(_key18==0) bushu=18;
- else if(_key15==0) bushu=15;
- else if(_key12==0) bushu=12;
- else if(_key9==0) bushu=9;
- else if(_key6==0) bushu=6;
- else if(_key3==0) bushu=3;
- }
- }
- }
- //����18B20����
- /*------------------------------------------------
- 18b20��ʼ��
- ------------------------------------------------*/
- bit Init_DS18B20(void)
- {
- bit dat=0;
- DQ = 1; //DQ��(f��)λ
- DelayUs2x(5); //�����ӕr(sh��)
- DQ = 0; //��Ƭ�C(j��)��DQ����
- DelayUs2x(200); //���_�ӕr(sh��) ���� 480us С��960us
- DelayUs2x(200);
- DQ = 1; //���߿���
- DelayUs2x(50); //15~60us �� ����60-240us�Ĵ����}�_
- dat=DQ; //���x=0�t��ʼ���ɹ�, x=1�t��ʼ��ʧ��
- DelayUs2x(25); //�����ӕr(sh��)����
- return dat;
- }
-
- /*------------------------------------------------
- �xȡһ��(g��)�ֹ�(ji��)
- ------------------------------------------------*/
- unsigned char ReadOneChar(void)
- {
- unsigned char i=0;
- unsigned char dat = 0;
- for (i=8;i>0;i--)
- {
- DQ = 0; // �o�}�_��̖(h��o)
- dat>>=1;
- DQ = 1; // �o�}�_��̖(h��o)
- if(DQ)
- dat|=0x80;
- DelayUs2x(25);
- }
- return(dat);
- }
- /*------------------------------------------------
- ����һ��(g��)�ֹ�(ji��)
- ------------------------------------------------*/
- void WriteOneChar(unsigned char dat)
- {
- unsigned char i=0;
- for (i=8; i>0; i--)
- {
- DQ = 0;
- DQ = dat&0x01;
- DelayUs2x(25);
- DQ = 1;
- dat>>=1;
- }
- DelayUs2x(25);
- }
-
- /*------------------------------------------------
- �xȡ�ض�
- ------------------------------------------------*/
- unsigned int ReadTemperature(void)
- {
- unsigned char a=0;
- unsigned int b=0;
- unsigned int t=0;
- Init_DS18B20();
- WriteOneChar(0xCC); // ���^�x��̖(h��o)��̖(h��o)�IJ���
- WriteOneChar(0x44); // ����(d��ng)�ض��D(zhu��n)�Q
- DelayMs(10);
- Init_DS18B20();
- WriteOneChar(0xCC); //���^�x��̖(h��o)��̖(h��o)�IJ���
- WriteOneChar(0xBE); //�xȡ�ضȼĴ����ȣ������x9��(g��)�Ĵ����� ǰ�ɂ�(g��)���ǜض�
- a=ReadOneChar(); //��λ
- b=ReadOneChar(); //��λ
-
- b<<=8;
- t=a+b;
-
- return(t);
- }
-
- /*------------------------------------------------
- uS�ӕr(sh��)����(sh��)������ݔ��?y��n)��?sh��) unsigned char t���o����ֵ
- unsigned char �Ƕ��x�o��̖(h��o)�ַ�׃������ֵ�ķ�����
- 0~255 �@��ʹ�þ���12M�����_�ӕr(sh��)Ո(q��ng)ʹ�ÅR��,�����ӕr(sh��)
- �L������ T=tx2+5 uS
- ------------------------------------------------*/
- void DelayUs2x(unsigned char t)
- {
- while(--t);
- }
-
- /*------------------------------------------------
- mS�ӕr(sh��)����(sh��)������ݔ��?y��n)��?sh��) unsigned char t���o����ֵ
- unsigned char �Ƕ��x�o��̖(h��o)�ַ�׃������ֵ�ķ�����
- 0~255 �@��ʹ�þ���12M�����_�ӕr(sh��)Ո(q��ng)ʹ�ÅR��
- ------------------------------------------------*/
- void DelayMs(unsigned char t)
- {
-
- while(t--)
- {
- //�����ӕr(sh��)1mS
- DelayUs2x(245);
- DelayUs2x(245);
- }
- }
-
- /*------------------------------------------------
- ���r(sh��)���Д��ӳ���
- ------------------------------------------------*/
- void Timer0_isr(void) interrupt 1
- {
- static unsigned int num;
- TH0=(65536-2000)/256; //�����xֵ 2ms
- TL0=(65536-2000)%256;
- num++;
- if(num==300) //
- {
- num=0;
- ReadTempFlag=1; //�x��(bi��o)־λ��1
- }
- }
-
- void _18b20(void) {
- unsigned int TempH,TempL,temp; //TempH,TempL
- if(ReadTempFlag==1)
- {
- ReadTempFlag=0;
- temp=ReadTemperature();
- if(temp&0x8000)
- {
- TempData[0]=0x40;//ؓ(f��)̖(h��o)��(bi��o)־
- temp=~temp; // ȡ����1
- temp +=1;
- }
- else
- TempData[0]=0;
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������

������Word��ʽ�ęn51�����d��ַ��
 ��Ƭ�C(j��)���������IJ��M(j��n)늙C(j��).doc
(1.6 MB, ���d��(sh��): 49)
��Ƭ�C(j��)���������IJ��M(j��n)늙C(j��).doc
(1.6 MB, ���d��(sh��): 49)
2019-1-25 14:25 �ς�
�c(di��n)���ļ������d����
���������IJ��M(j��n)늙C(j��)
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664