|
Ŀ�
[ժҪ] ��һ�� �wՓ 1.1����С܇�ā�Դ 1.2�о�����С܇��Ŀ�ĺ����x 1.3����С܇�ĬF(xi��n)�δ�� �ڶ��� �������OӋ�cՓ�C 2.1����ϵ�y(t��ng) 2.2 �Դģ�K 2.3 늙C��ģ�K�OӋ 2.4 �z�yģ�K 2.5 �@ʾģ�K ������ Ӳ���OӋ 3.1 ���w�OӋ 3.2 �����· 3.3 늙C���· 3.4 ѭ�E�z�y�· 3.5 �@ʾģ�K�· ������ ܛ���OӋ 4.1 ������ģ�K 4.2 ѭ�Eģ�K�������̈D ������ PCB������ 5.1 PCB���OӋ���� �Y���Z �x�o �����īI ��� ���Dһ
[ժ Ҫ]���Ľ�B���üt���늂�������rpr220����ѭ�EС܇���OӋ�c���F(xi��n)�������c��ɫ���淴��ܴ�ĺ�ɫ�^���z��·������С܇���ռȶ�·��ѭ�E���Ãɂ�ֱ���p��늙C����С܇������B(t��i)��ͨ�^���b��ֱ��늙C�ϵĹ�늌���܌��F(xi��n)��늙C�ٶȵĜy��������AT89C52��Ƭ�CоƬ������ƺ��ġ� ����ͬ�rҲ��B��ITR8104�ļt���늜y�ٹܣ���늌��ܰ��b�ڹ�늜y�ٱP��С�A��(j��ng)�^�ĈA���ϣ�ͨ�^���T�ęz�y�·��ݔ����̖ݔ�뵽��Ƭ�C��(n��i)����̎����̎�����M���@ʾ̎���� �S���ƌW���g�İl(f��)չ��������С܇��Ҫ��ҲԽ��Խ�ߣ����и��N�������đ����nj��F(xi��n)����С܇�����ܡ����P�I���ء����S������С܇���g�İl(f��)չ��ԓ헼��g�ɏV���������Ԅ�Ѳ߉���o�����a(ch��n)�����Ԅ�ѭ�E�ȡ�
[�P �I �~] ѭ�E ֱ���p��늙C ���������������t�����������늂�������
��һ�� �wՓ
1.1����С܇�ā�Դ�Ե�һ�_���I(y��)�C�����Q���ԁ����C���˵İl(f��)չ�ѽ�(j��ng)�鼰�Cе����ӡ�ұ�𡢽�ͨ������������I�����C���˵�����ˮƽ������ߣ�����Ѹ�ٵظ�׃���˂������ʽ���˂��ڲ���̽ӑ�����졢�J�R��Ȼ���^���У�����������˄ڄӵęC��һֱ����ĉ��롣 �S���ƌW���g�İl(f��)չ���C���˵ĸ��X�������N�Խ��Խ�࣬����ҕ�X�������ɞ��Ԅ����ߺ��{����Ҫ������ҕ�X�ĵ��͑����I�������ʽ���܌���ϵ�y(t��ng)������ҕ�X�ĸ��N���g���ԈD��̎�����g���ஔ�l(f��)�_�������ڈD������⼼�g߀����C��ҕ�X��Ҫͨ�^�������\��Ҳֻ���R�eһЩ�Y�����h(hu��n)�����ε�Ŀ�ˡ�ҕ�X�������ĺ��������ǔz��ܻ�CCD��Ŀǰ��CCD���������ԄӾ۽�����CCD�������ăr���w�e��ʹ�÷�ʽ�ϲ���ռ��(y��u)�ݣ�����ڲ�Ҫ�������D��ֻ��Ҫ���Ը��X��ϵ�y(t��ng)�п��]ʹ�ýӽ��X��������һ�N������Ч�ķ����� �ښv��ȫ����W������OӋ��ِ�ж�γ��F(xi��n)�˼��⡢�C�����һ�w�ĺ�������С܇�}Ŀ�����^��Ӱ��������w˼��������܇��ِ��ѭ�E������С܇�Ļ������ܣ���Ƭ�Cͨ�^���b��С܇�ײ��Ĺ���������������̖�����o��Ƭ�C�M��̎�����Ķ�����С܇�ڰ�ɫ·����ѭ�ھ����ߡ�
1.2�о�����С܇��Ŀ�ĺ����x����С܇Ҫ���F(xi��n)�Ԅӌ�ѭ�E���ܾͱ��Ҫ��֪����������֪�������ஔ�o�C����һ��ҕ�X���ܣ��x�����_�����M·����ʹ�Â�������֪·���������Д�������Ĉ�(zh��)�Є����� ԓ����С܇��������C���˵ĵ��ʹ����������Է֞�����M�ɲ��֣��������z�y���֡���(zh��)�в��֡�CPU���C����Ҫ���F(xi��n)�Ԅ�ѭ�E���ܣ�߀���ԔUչ�y�ٵȹ��ܣ���֪��������܇�١����Ԍ��F(xi��n)С܇�Ԅ��R�e·�����x�����_�����M·������������Ҫ���Йz�y���ֿ��]��С܇һ�㲻��Ҫ��֪�����ĈD��ֻҪ����Ը�֪���ɣ����Կ����ᗉ���F��CCD�����������]ʹ�Ãr�������Ĺ��������������䮔������С܇�Ĉ�(zh��)�в��֣�����ֱ��늙C���䮔?sh��)ģ���Ҫ����С܇�����M������ٶȡ���Ƭ�C��ֱ��늙Cһ���ЃɷN��������һ������ռ�Æ�Ƭ�C�YԴ��ֱ���x����PWM���ܵĆ�Ƭ�C���@�ӿ��Ԍ��F(xi��n)���_�{�٣��ڶ���������ܛ��ģ�MPWMݔ���{�ƣ����Ì��I(y��)��늙C��оƬ�M�п��ƣ����Ԍ��F(xi��n)���_�{�١��D��ͬ�r��Ƭ�C��̖���x������^���]�����H��r�������x��ڶ��N������CPUʹ��STC89C52��Ƭ�C�����ܛ�����̌��F(xi��n)��
1.3����С܇�ĬF(xi��n)�δ���F(xi��n)����С܇�l(f��)չ�ܿ죬��������ߵ��������ИI(y��)���Ќ��|�ɹ���������Ɍ��F(xi��n)ѭ�E�����ϡ��z�y�NƬ��������졢���µȻ������ܣ��@��(ji��)������OӋ��ِ����С܇��������ϵ�y(t��ng)�l(f��)չ�����^�������w˼��������С܇��������ǰ�С�δ��������С܇�İl(f��)չ������Ҫ�������Ԅ�����c������С܇Ҳ�Mһ���������ܻ���
�ڶ��� �������OӋ�cՓ�C
����(j��)Ҫ�_�����·������ڬF(xi��n)�����늄�܇�Ļ��A�ϣ����b�t�����������늙z�y�������F(xi��n)��С܇�����·�����ٶȠ�r�Č��r�y���������y����(sh��)��(j��)��������Ƭ�C�M������̎������Ƭ�C����Ŀǰ���ñ��^�V����AT89C52��Ƭ�C��Ȼ���Ɇ�Ƭ�C����(j��)���z�y�ĸ��N��(sh��)��(j��)���F(xi��n)��С܇�����ܿ��ơ��@�N�����܌��F(xi��n)��С܇�\�Ӡ�B(t��i)�M�Ќ��r���ƣ������`��ɿ������ȸߣ��ɝM��ϵ�y(t��ng)�ĸ��Ҫ�� 2.1����ϵ�y(t��ng)����(j��)�OӋҪ�����J����OӋ���ڶ�ݔ�����ď��s������Ɔ��}����(j��)�ˣ��M�������ɷN�������M���˾C�ϵı��^Փ�C�����w���£� ����һ�� �x��һƬCPLD����EPM7128LC84-15������ϵ�y(t��ng)�ĺ��IJ��������F(xi��n)�����c̎���Ĺ��ܡ�CPLD�����ٶȿ졢�������ס��YԴ�S�����_�l(f��)���ڶ̵ȃ�(y��u)�c��������VHDL�Z���M�о����_�l(f��)����CPLD�ڿ������^��Ƭ�C���^����ӄݡ�ͬ�r��CPLD��̎���ٶȷdz����С܇�����M�ٶȲ�����̫�ߣ���ô��ϵ�y(t��ng)̎����Ϣ��Ҫ��Ҳ�Ͳ���̫�ߣ����@һ�c��MCU���ѽ�(j��ng)���Ԅ����ˡ�������ԓ�������،��ڿ����������S�S����Ҫ���ӵ��y�}
�������� ���Æ�Ƭ�C��������ϵ�y(t��ng)�ĺ��ģ�����������M�е�С܇���Ԍ��F(xi��n)��ȶ�������ָ�ˡ���ַ����҂���ϵ�y(t��ng)�����P�I���ڌ��F(xi��n)С܇���Ԅӿ��ƣ������@һ�c�ϣ���Ƭ�C���@�F(xi��n)�������ă�(y��u)�ݡ������ƺ��Ρ����㡢��ݡ��@��һ������Ƭ�C�Ϳ��Գ�ְl(f��)�]���YԴ�S�������^�鏊��Ŀ��ƹ��ܼ���λ��ַ�������ܡ��r������ȃ�(y��u)�c����ˣ��@�N������һ�N�^������ķ����� ᘌ����OӋ���c�������_�P��ݔ��ď��s�������ϵ�y(t��ng)����Ҫ���L̎�����_�P���Ę˜ʆ�Ƭ�C���������þ���I/O�ںͳ���惦����С�w�e��Ƭ�C��D/A��A/D����Ҳ�����x�á�����(j��)�@Щ�����҂��x����MCS-51��Ƭ�C��51��Ƭ�C���й������λ����ָ�I/O�ھ��ɰ�λ��ַ��������g���_8K�����ڱ��OӋҲ�b�b���࣬�����F����51��Ƭ�C�r��dz��������ھC�Ͽ��]�˂��������ɲ�늙C���ӵ��T�����غ��҂��Q������һƬ��Ƭ�C���������STC89C52��Ƭ�C���YԴ�� �������σɷN�������҂��x�÷�������
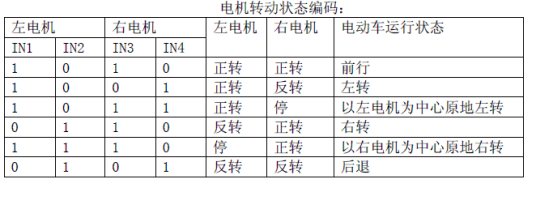
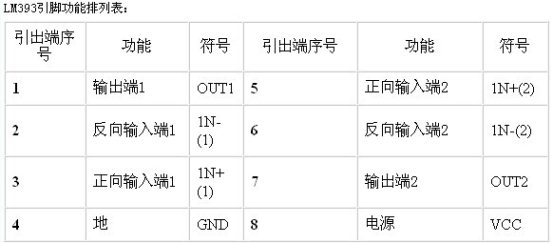
2.2 �Դģ�K����һ�� ���ø�늳��ṩ5V��늉��M���·��늣����]������ϵ�y(t��ng)�����������r���~��늉����҂��x���˷������� �������� ϵ�y(t��ng)���w�ϲ���DC+9V��늳ؽ�(j��ng)LM7805���˷�(w��n)���ܷ�(w��n)����ݔ��DC+5V늉���늡�늙C��ģ�K�Դ����4��(ji��)��늳�ݔ��DC+6V늉���늡� 2.3 늙C��ģ�K�OӋ����һ�� �����^�����늄әC���_���P�M�п���,ͨ�^�_�P���ГQ��С܇���ٶ��M���{�����˷����ă�(y��u)�c���·�^�麆��,ȱ�c���^�����푑��r�g��,�דp��,�����^��,�ɿ��Բ��ߡ� �������� ��Ҫ����L298N��ͨ�^��Ƭ�C��I/Oݔ���׃оƬ���ƶ˵��ƽ�������Ԍ�ֱ��늙C�M�������D��ֹͣ�IJ�����ݔ�����_�cݔ�����_��߉�Pϵ�D��D1��ʾ��
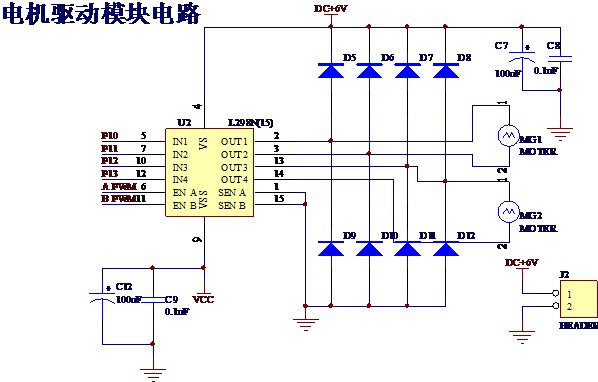
늙C�Ӳ���һƬ����늙C��оƬL298N��L298N��SGS��˾�Įa(ch��n)Ʒ����(n��i)������4ͨ��߉���·����һ�N���������늙C�Č�������������(n��i)������H��ĸ�늉�������pȫ��ʽ���������˜�TTL߉�ƽ��̖������46V��2A���µ�늙C�������_���ЈD��D2��ʾ�� OUT1��OUT2��OUT3��OUT4֮�g�քe�Ӄɂ�늄әCMG1��MG2��IN1��IN2��IN3��IN4���_�Ć�Ƭ�Cݔ������ƽ������늙C����D��ENA��ENB�ӿ���ʹ�ܶˣ�ͨ�^pwm���ο���늙C���D�١�L298N��߉���ܱ����D��ʾ��
����늙C���ٶȣ��҂�����pwm�{�ٵķ�������ԭ�������_�P����һ�����ڃ�(n��i)�Č�ͨ�r�g��t�����ڞ�T���t늙C�ɶ˵�ƽ��늉�U=VCC*(t/T)=a*VCC�����У�a=t/T��ռ�ձȣ���VCC���Դ늉���늙C���D���c늙C�ɶ˵�늉��ɱ�������늙C�ɶ˵�늉��c���Ʋ��ε�ռ�ձȳ����ȣ����늙C���ٶ��cռ�ձȳɱ����� ռ�ձ�Խ��늙C�D��Խ�졣��Ӳ���·�ϣ��҂�����Ƭ�C��P1^0~P1^3�ڷքe�B�ӵ�L289NоƬ��IN1~IN4�ϣ�ͨ�^��׃P1^0~P1^3�ڵĸߵ��ƽ׃�Q�Կ���С܇��ǰ�M�����cͣ�D��ͨ�^��׃P1^0~P1^3���ϵĸߵ��ƽ��ռ�ձ��Կ���늙C���D�١� Pwm��Ϙ������·L298N�����F(xi��n)ֱ��늙C�{�٣��������{�ٷ�������ˣ��҂��x���˷������� ���⣬�҂��e��ֱ��늙C��늘Ѓɶ˲�(li��n)һ����Ƭ���104���Է�(w��n)��늙C��늉������ڌ���Ƭ�C��ɸɔ_��
2.4 �z�yģ�K��ģ�K�֞�ɂ����֣��քe��z�yѭ�Eģ�K�͜y��ģ�K�� ��һ���֣��z�yѭ�Eģ�K
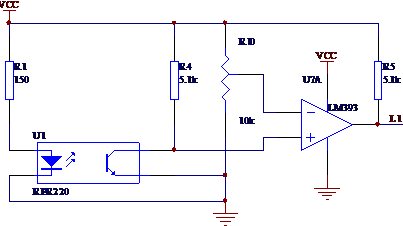
����һ�� ���Eģ�K�҂������ù������M�ɣ�����������ֵ���Ը��S�܇��h(hu��n)���⾀��׃����׃�������⾀���䵽�ھ�����r���⾀�����^�����⾀���䵽��ɫ�����ϕr���⾀�����^������ˮ���������ڰ�ɫ·��ͺھ��Ϸ��r����ֵ���l(f��)�����@��׃�� ����ֵ��׃��ֵ�D����ߵ��ƽ��׃���������@�N��ʽ�ܭh(hu��n)����Ӱ��^���H�yԇ�в�����·�����z�yѭ�Eģ�K�����˜p�ٿ�Ҋ��ĸɔ_������̖��ݔ���˼�����һ�����Tݔ����̖���pС�h(hu��n)����ĸɔ_�������ڌ��H�yԇ�аl(f��)�F(xi��n)ԓ�·ݔ��������(w��n)�����·�D��D����ʾ�����аl(f��)����O��D1���·��ֻ�������·���o����Դ�a���������Ա���С܇��ҹ�gѭ�E��
�������� ���@���҂����H���õ��� RPR220 �ͷ���ʽ�����������Č��Eģ�K RPR220��һ�Nһ�w���������̽�y������l(f��)������һ���黯扼t��l(f��)����O�ܣ�����������һ�����`���ȣ���ƽ�������O�� ���l(f��)����O�ܰl(f��)���Ĺⷴ���r�����O�܌�ͨ��ݔ�����ƽ�� �������σɷN�������҂��x�÷�������
ԓ�������������c��
1.�����R������`���ȣ� 2.��(n��i)�õĿ�Ҋ���^�V���Ԝp���xɢ���Ӱ푣� 3.�w�eС���Y���o����
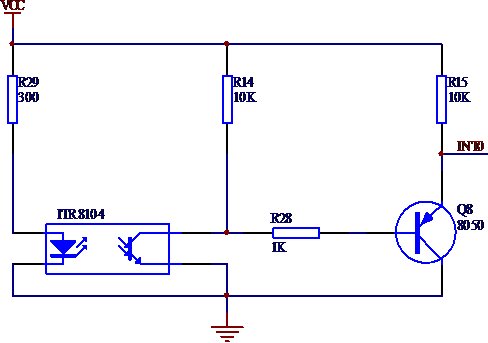
�ڶ����֣��y��ģ�K ����һ�� ����Ŀǰ���g���^���M�Ļ�������������y�ٵĺ���Ԫ����ԓ�����ă�(y��u)�c���w�eС���y�پ��ʣ��`��С��оƬ���ɶȸߡ��������ڳɱ��^�ߣ���ˣ�δ�x��ԓ������ �������� ����Ŀǰ���g���^����ļt���늌�������鱾ģ�K�y�ٺ���Ԫ������̎�҂��x����̖��ITR8104�Ĺ�늌��ܡ���늌��ܰ��b�ڹ�늜y�ٱP��С�A��(j��ng)�^�ĈA���ϡ�ԓ���������Мy�پ��ʡ��ܿ�Ҋ��ɔ_С���r����ˡ������b�䡢ʹ�÷�������c�� ���t�⌦��ܰ��b�ڹ�늱P�ψA�ĈA���ϣ�늙Cÿ���Dһ �ܣ����b�ڹ�늱P�ϵĹ�늂������z�y4����̖�������z�y����̖�͵���Ƭ�C���ⲿ�Д�I/O�����ⲿ�Д��M���Д�Δ�(sh��)��Ӌ��(sh��)���M��ͨ�^�����㷨��С܇������ٶ��@ʾ�ڔ�(sh��)�a���ϡ�
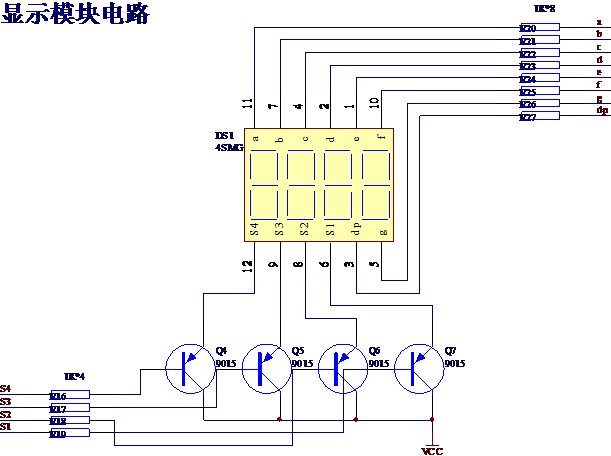
2.5 �@ʾģ�K����һ�� ����LCD1602Һ���@ʾ�������@ʾģ�K�·�@ʾ�������˷����ă�(y��u)�c�ǿ��Ԍ�С܇����ʹ��Ϣ����������ٶȡ�·�̡���B(t��i)�ȵ��@ʾ�������������]��ԓ�����ɱ��^�ߣ����w�e�^����˛]�в��á� �������� ������λ��ꖘO��(sh��)�a������ģ�K�·���@ʾ������ͨ�^�ⲿ���b�چ�Ƭ�C�ϵĹ�늌���܌���늱P�����b��ֱ��늙C�D���ϣ��M�І�Ƭ�C���ⲿ�Д�Ӌ�٣��M���͔�(sh��)�a���@ʾ�����У���(sh��)�a�ܵĸ߃�λ�@ʾС܇����·�̣��̓�λ�@ʾС܇������ٶȡ�ԓ�·�Y�����Σ��ɱ��^�ͣ����һ����M���OӋ��Ҫ�� �������σɷN�����Լ����H�OӋҪ���҂��x����
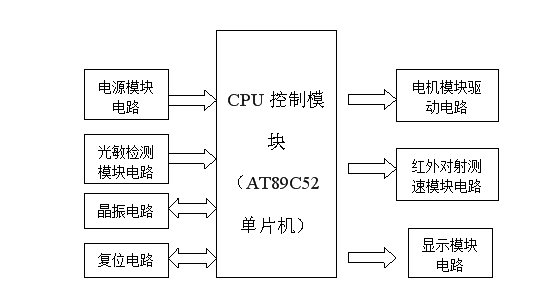
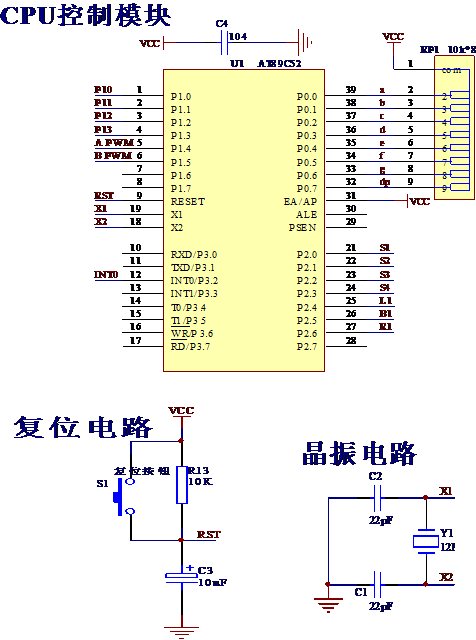
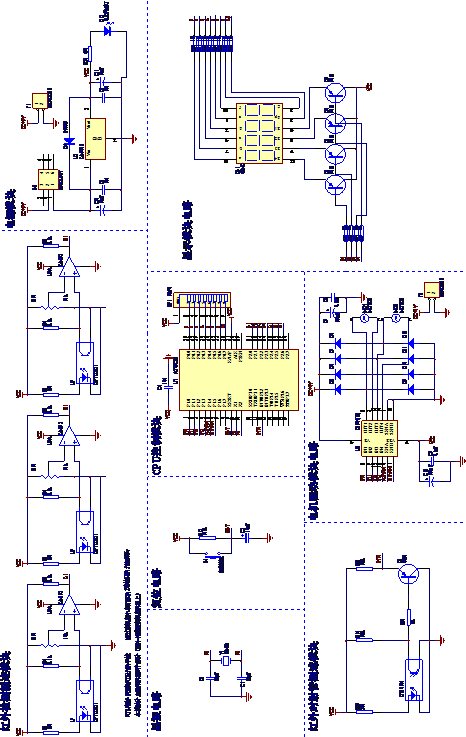
������ Ӳ���OӋ 3.1 ���w�OӋ ����ϵ�y(t��ng)�������С܇�ęCе�Y��,��������С܇�ĵױP���D�����늙C������B(t��i)����늙C,�܉�ƽ��(w��n)��ۙ·���ɫ܉�E�\�У����܌��r�ĸ���(j��)С܇�������r��С܇�Ġ�B(t��i)�M���{�����˲���ͨ�^���I(y��)��늙C��оƬL298N���ơ� С܇����ϵ�y(t��ng)���w�Y�����D��ʾ����AT89C52��Ƭ�C����ƺ���,��Ҫ���Դģ�K�����E�z�yģ�K���t�⌦��y��ģ�K��ֱ��늙C��ģ�K����(sh��)�a���@ʾģ�K�ȹ���ģ�K�M�ɡ��������ù�늂�������·����̖�M�Йz�y,��(j��ng)�^���^��̎����,�ͽo��Ƭ�C�M�Ќ��r����,��Ƭ�Cݔ����������̖�o��оƬ��늙C�D��,�Ķ���������С܇���\�ӡ��c��ͬ�r���t�⌦��܂������_ʼ��С܇������ٶ��M�Йz�y����ͨ�^�����㷨��С܇������ٶ��c�����x���r���@ʾ�ڔ�(sh��)�a���ϡ�
3.2 �����· �����OӋ������оƬ�x���STC89C52��STC89C52��һ�N���ĸ�����CMOS 8λ������������8K��ϵ�y(t��ng)�ɾ���Flash�惦��ʹ�ø��ܶȷ���ʧ�Դ惦�����g���죬�c80C51�a(ch��n)Ʒָ������_��ȫ����Ƭ��Flash���S����惦����ϵ�y(t��ng)�ɾ��̣����m�ڳ�Ҏ(gu��)���������چ�оƬ�ϣ������`�ɵ�8λCPU���ھ�ϵ�y(t��ng)�ɾ���Flash ��ʹ��STC89C52�鱊��Ƕ��ʽ���Ƒ���ϵ�y(t��ng)�ṩ���`�����Ч�Ľ�Q�����������·ģ�K����AT89C52��Ƭ�C��������о��CPU�����ⲿ��(j��ng)��(w��n)���·ģ�Kݔ����+5Vֱ���Դ��늣���֧�ָߴ�1000�����ϔ�(sh��)��(j��)������
3.3 늙C���· 늙C��ģ�K�·�ǻ���һƬ����늙C��оƬL298N��ԓоƬ���й�����(w��n)�����{�ٷ����V���`�ԓ���ֲ��ê�����DC+6Vֱ���Դ��늣����H�{ԇ�^���аl(f��)�F(xi��n)����ͨ�^PWM��늙C�ĵ��\�D�ٶ��M���{��(ji��)��
3.4 ѭ�E�z�y�·
��һ���֣��z�yѭ�Eģ�K �z�yѭ�Eģ�K��Ҫ���õ��� RPR220 �ͷ���ʽ�����������ģ�RPR220��һ�Nһ�w���������̽�y������l(f��)������һ���黯扼t��l(f��)����O�ܣ�����������һ�����`���ȣ���ƽ�������O�� ���l(f��)����O�ܰl(f��)���Ĺⷴ���r�����O�܌�ͨ��ݔ�����ƽ�� �ڴ˲����У��҂�ʹ�����p늉����^��LM393���D�������_�������б����·�D��
�ڶ����֣��y��ģ�K
��D��ʮ����ʾ��������ITR8104�ڛ]���ⲿ�Д���̖�r��ITR8104���չܽ�(j��ng)R14��茦��ݔ�����ƽ���˕rPNP���O��Q8�����ڽ�����B(t��i)��INT0ݔ�����ƽ�� �����������ܵ��ⲿ�Д���̖����늜y�ٱP�ϵ�4��С�ף����t����������չܵļ�늘O�ƽ�����ͣ���(j��ng)�������R28��ͨ���O��Q8��INT0�˕r�ƽ�����ͣ���Ƭ�CI/O��P3.2�a(ch��n)���Д���̖����Ƭ�C���Д���̖�M��Ӌ��(sh��)���M�����z�y���Ĕ�(sh��)��(j��)�M�г����㷨̎��ݔ����
�D��ʮ�� �t�⌦��ܜy��ģ�K�·
3.5 �@ʾģ�K�·�@ʾģ�K�锵(sh��)�a���ӽ�(j��ng)���·���·��PNP���O�����_�P�ܵ������Á��ӹ�ꖘO��(sh��)�a�ܡ����x��ͨ�^1K���������ӆ�Ƭ�C��P0�ڣ����x�����ã�4��λ�x�ڽӆ�Ƭ�C��P2.0��P2.3�ڣ�����Ҫ�x�І���(sh��)�a���ǣ�������λ�x����ݔ�����ƽ����(j��ng)PNP���O�ܺ��x��������λ���_�����Ƶ�Ŀ�ģ�����R16��R19��������裬��ֹ����^������(sh��)�a�ܣ����o��(sh��)�a�ܵ����á�
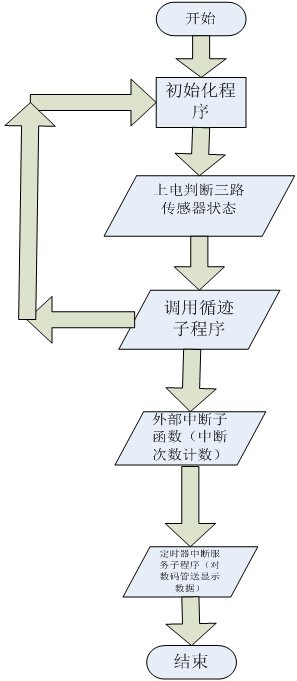
������ ܛ���OӋ4.1 ������ģ�K������Ĭ�J��Ƭ�C����{�ó�ʼ�������Լ��Д���·�������Ġ�B(t��i)��ݔ�뵽��Ƭ�C��(n��i)�M��̎����ݔ�����{��ѭ�E�ӳ���ͬ�r��Ƭ�C�Ķ��r�����ⲿ�Д�����ӳ��z�y�����ⲿ�Д�Δ�(sh��)̎�������rˢ���@ʾ�ڔ�(sh��)�a���ϡ�
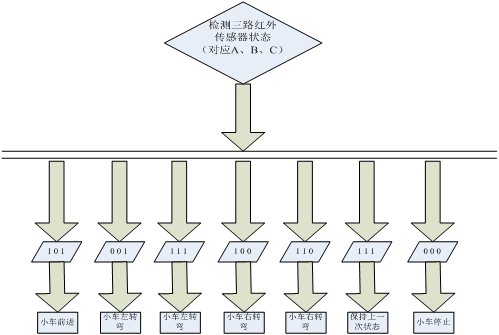
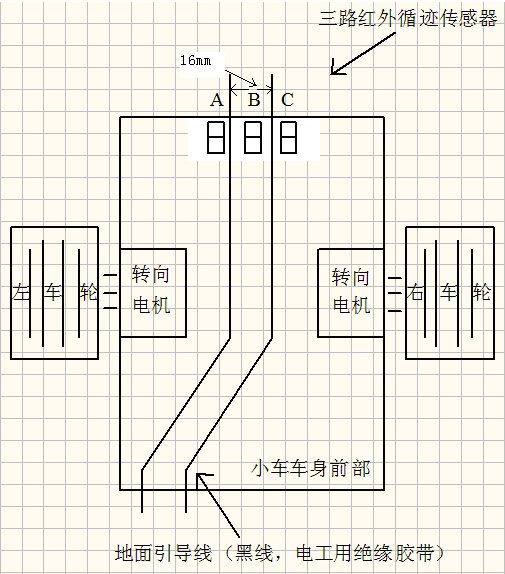
4.2 ѭ�Eģ�K�������̈D����(j��)���H��r���҂���������С܇��7�N����B(t��i)��������ʾ�� С܇��7�N����B(t��i) A B C ��B(t��i) a 1 0 1 B·�����ںھ��ϣ�С܇ǰ�M b 0 0 1 AB���ںھ��ϣ�С܇���D�� c 1 1 1 A�ںھ��ϣ�С܇���D�� d 1 0 0 BC�ںھ��ϣ�С܇���D�� e 1 1 0 C�ںھ��ϣ�С܇���D�� f 1 1 1 ABC�����ںھ��ϣ�С܇������һ�Π�B(t��i)��׃ g 0 0 0 ABC���ںھ��ϣ�С܇ֹͣ
������ PCB������
5.1 PCB���OӋ����
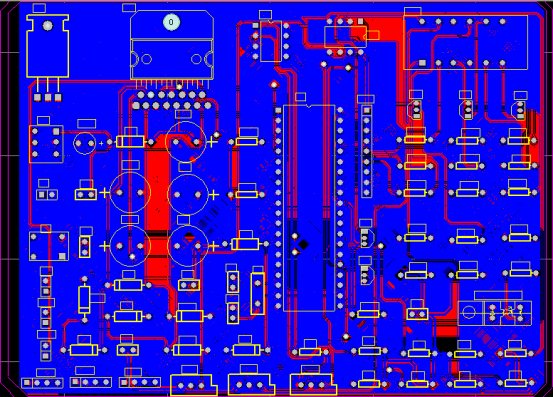
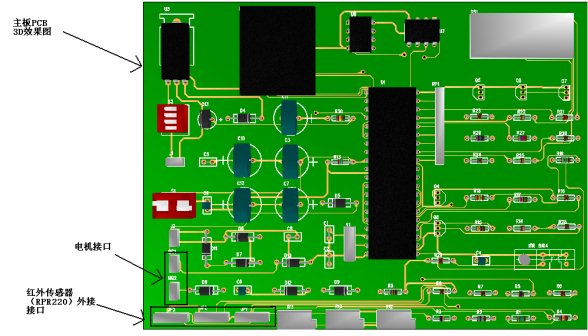
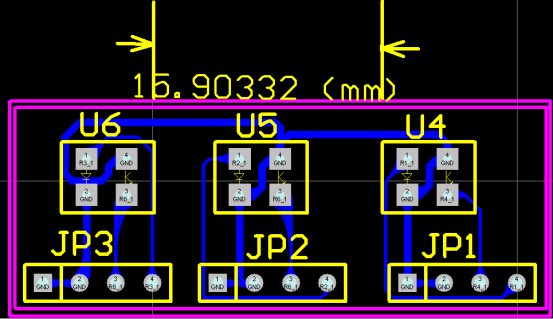
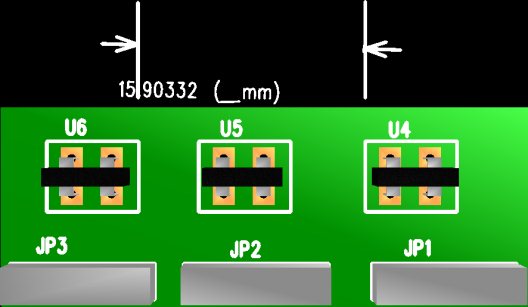
����Protel 99se�L��ԭ��D�cPCB�壬�������^���б��ע�⺸�P�Ĵ�С�c�~���Č��ȡ����xȡ�ĺ��P��(n��i)����0.8mm,�⏽2mm��������������2.5mm���Դ�c�ؾ���5mm�����������r���������_��������Ҫ�� ����Protel 99se ܛ����Ӳ���·ԭ��DҊ���Dһ���D1�����Protel 99se ܛ���L�Ƶ�����PCBӡˢ�·�壬�L���·�D�Լ��ư������^���ǽ�����Ӳ��ԭ��D�ijɹ��L���Լ�ÿ������Ӳ���·�ķ��Ͷ�Μyԇ�Ļ��A����ɵġ��e�Ǻ�������PCB��ĵĕr���˿��]С܇���H�����r����Ҫ����·RPR220�t��������Ϊ��L��PCB�·�壨���壩�Ǹ���(j��)���������H���bλ�ð��b��С܇ǰ�ײ������bʾ��D��D6��ʾ�� �D2 ����Protel 99se �L�Ƶ�����PCB�D��δ�ӜI�μ����~ǰ���·�壩���D3����Protel 99se �L�Ƶ�����PCB 3D Ч���D���D4 ����Protel 99se �L�Ƶĸ���PCB�D���D5 ����Protel 99se �L�Ƶĸ���PCB 3DЧ���D��
�D1 ����Protel 99se �L�Ƶ�����PCB�D�����~���I���^����·�壩
�D2 ����Protel 99se �L�Ƶ�����PCB�D��δ�ӜI�μ����~ǰ���·�壩
�D3����Protel 99se �L�Ƶ�����PCB 3D Ч���D
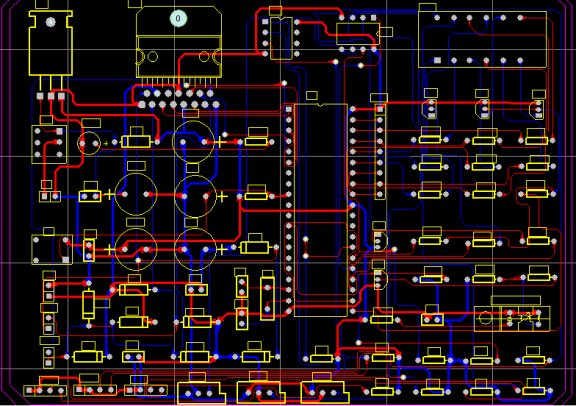
�D4 ����Protel 99se �L�Ƶĸ���PCB�D
�D5 ����Protel 99se �L�Ƶĸ���PCB 3DЧ���D
�D6 ����Protel 99se �L�Ƶĸ���PCB 3DЧ���D �Y���Z
����ϵ�y(t��ng)���OӋ�Ԇ�Ƭ�C����ģ������˶�N����������ܛ����Ӳ����Y�ϡ���ϵ�y(t��ng)�܌��F(xi��n)���¹��ܣ� ��1���Ԅ����A�O܉�����С܇������^���У��܉��Ԅәz�y�A���O�õ�܉��ѭ�E������ƫ�x���܉��ԄӼm�������ص��A�O܉���ρ��� ��2��ͨ�^���b�������ϵĔ�(sh��)�a���܉r�@ʾС܇��ǰ����ٶ��c�����x��
���\����r����ѭ�E��Ч�����^�ã��@ʾ��Ч�����Ǻܺã����J��������ܛ�����ֵ�ԭ���������С܇���ٶȲ��ÿ��ƣ��mȻ�����ˌ��I(y��)��늙C����оƬ����pwm�{���д����ƣ��@Ҳ�����@���OӋ���`�^(q��)��������������l���͕r�g�����S���ҿ϶��ܽ�Q�@һ���}�� ͨ�^�����OӋ�������˺ܶ���ǰ���쾚�Ė|�����J�R�˺ܶ���ǰ����Ϥ�Ö|����ʹ�������������M��һ����Ҳ�J�R���ܶ�IJ��㡣
�x�o
���OӋ�܉������ɣ�߀�������ώ��Լ���߅�ĺܶ�ͬ�W��ָ���͎��������OӋ�^���У����ώ��o����Ϥ�ĵ�ָ��������Ҫ���ǽo���ҽ�Q���}��˼·�ͷ������������OӋ�h(hu��n)�������ķ���o���˴����Ď�����֧�֣��ڴˣ��Ҍ����ώ���ʾ���擴�ĸ��x��ͬ�r���x���Ў����^�ҵ�ͬ�W�����x�u��ώ���æ֮�г���r�g����Փ���M�����u醣�
���Dһ
������Word��ʽ�ęn51�����d��ַ��
 ���چ�Ƭ�Cѭ�EС܇���OӋ.doc
(806 KB, ���d��(sh��): 29)
���چ�Ƭ�Cѭ�EС܇���OӋ.doc
(806 KB, ���d��(sh��): 29)
2018-9-7 10:40 �ς�
�c���ļ������d����
| 

 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664