超聲波跟隨小車
【專科組】
一、系統方案本系統主要由超聲波模塊、電機驅動模塊、系統控制模塊、電源模塊組成,下面分別論證這幾個模塊的選擇。
1、超聲波模塊的論證與選擇方案一:HC-SR04
HC-SR04超聲波測距模塊可提供2cm-400cm的非接觸式距離感測功能,測距精度可達高到3mm;模塊包括超聲波發射器、接收器與控制電路。
方案二:US-100
US-100 超聲波測距模塊可實現 0~4.5m 的非接觸測距功能,擁有 2.4~5.5V 的寬電壓輸入范圍,靜態功耗低于 2mA,自帶溫度傳感器對測距結果進行校正,同時具有 GPIO,串口等多種通信方式。
HC-SR04和US-100的測距和精確度都差不多,US-100的價格比HC-SR04更高,選擇方案一更經濟實惠。
2、電機的論證與選擇方案一:采用直流電機,優點在于硬件電路設計簡單。當外加額定直流電壓時,轉速幾乎相等,調速性能較好,且性價比高。對于小車的行駛,能夠很好的控制。
方案二:采用進步電機,進步電機可以實現精確的轉角輸出,只要施加合適的脈沖序列,電機可以按照人們預定的速度或方向進行連續的轉動,便于控速,但是軟件程序的編寫較直流電機稍顯復雜。
兩相比較直流電機更符合本小車的要求,故選擇方案一。
3、電機驅動模塊的論證與選擇方案一:雙L298驅動模塊
L298采用SMT工藝穩定性高,采用高質量鋁電解電容,使電路穩定工作。可以直接驅動兩路3-16V直流電機,并提供了5V輸出接口(輸入最低只要6V),可以給5V單片機電路系統供電(低紋波系數),支持3.3V MCU ARM控制,可以方便的控制直流電機速度和方向,也可以控制2相步進電機,5線4相步進電機。
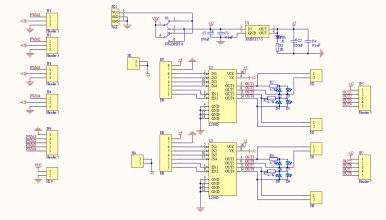
雙L298驅動原理圖
方案二:智能車電機驅動模塊
BTS7960是應用于電機驅動的大電流半橋高集成芯片,它帶有一個P溝道的高邊MOSFET、一個N溝道的低邊MOSFET和一個驅動IC。P溝道高邊開關省去了電荷泵的需求, 因而減小了EMI。集成的驅動IC具有邏輯電平輸入、電流診斷、斜率調節、死區時間產生和過溫、過壓、欠壓、過流及短路保護的功能。
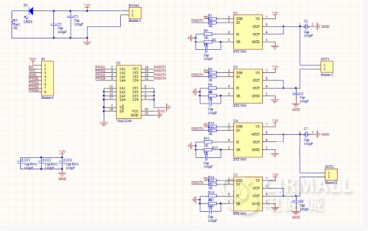
BTS7960驅動原理圖
L298驅動能力有限,芯片內阻很大,負載稍大發熱嚴重,利用率非常低,但用于驅動智能小車的電機足夠了,價格合適,經濟實惠。BTS7960驅動能力大(相對l298而言),但此芯片英飛凌已經停產,市面是大多是翻新貨,品質良莠不齊,且價格高,綜上所述,選擇方案一
4、控制系統的論證與選擇采用單片機作為整個系統的核心,用其控制行進中的小車,以實現其既定的性能指標。充分分析我們的系統,其關鍵在于實現小車的自動控制,而在這一點上,單片機就顯現出來它的優勢——控制簡單、方便、快捷。這樣一來,單片機就可以充分發揮其資源豐富、有較為強大的控制功能及可位尋址操作功能、價格低廉等優點。因此,這種方案是一種較為理想的方案。
單片機的選擇
方案一:Stm32
方案二:51
STM32優點:處理速度快,片內程序存儲空間大,性價比高,功耗低,資源豐富。
缺點:程序編寫要求較高。
51優點:操作方便,配置簡單,應用普遍。
缺點:I/O口較少,設計外部電路較為復雜。
基于我們現階段的學習我們最終選擇了51單片機中的STC系列單片機
STC單片機優點:
1、抗干擾能力強;
2、保密性能強悍,很難被破解;
3、單片機時鐘有防外部電磁輻射功能;
STC單片機缺點:
1、功耗較高,5V供電;
2、8位,運行速度慢;
3、無硬件乘法器,乘除法運算都為4周期指令;
4、單片機內集成資源少。
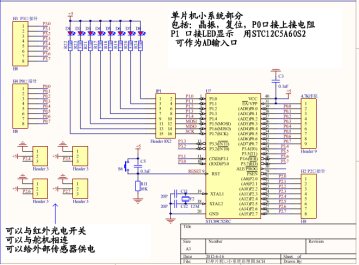
Stc最小系統原理圖
5、電源選用Li-ion 18650 7.4v。
二、系統理論分析與計算1、測距的分析與計算 通過超聲波發射裝置發出超聲波,根據接收器接到超聲波時的 時間差就可以知道距離了。 超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。(超聲波在空氣中的傳播速度為340m/s,根據 計時器記錄的時間t,就可以計算出發射點距障礙物的距離(s),即:s=340t/2)
2、跟隨的分析與計算 超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。(超聲波在空氣中的傳播速度為340m/s,根據 計時器記錄的時間t,就可以計算出發射點距障礙物的距離(s),即:s=340t/2)當小車與障礙物距離小于20cm時,小車后退;大于20cm小于40cm時,小車停止;大于40cm時,小車前進。從而達到小車跟隨障礙物的目的。
三、電路與程序設計1、電路的設計(1)系統總體框圖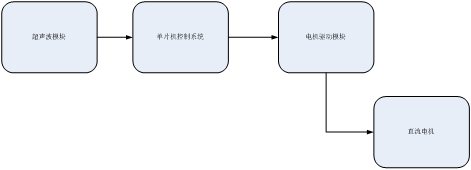
2、程序的設計(1)程序功能描述與設計思路1、程序功能描述
根據題目要求軟件部分主要實現超聲波測距與超聲波跟隨。
1)超聲波測距:超聲波模塊發射接收信號的時間與超聲波在空氣中的傳播速度算出距離s=340t/2。
2)超聲波跟隨:通過小車與障礙物的距離控制小車的運行。
2、程序設計思路
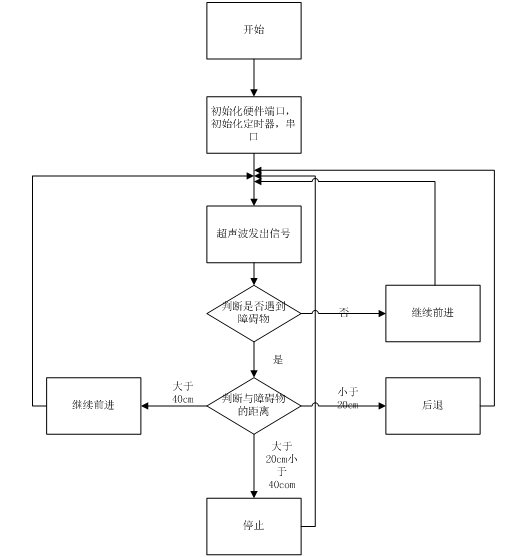
超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。(超聲波在空氣中的傳播速度為340m/s,根據 計時器記錄的時間t,就可以計算出發射點距障礙物的距離(s),即:s=340t/2)當小車與障礙物距離小于20cm時,小車后退;大于20cm小于40cm時,小車停止;大于40cm時,小車前進。
(2)程序流程圖1、主程序流程圖
四、測試方案與測試結果1、測試方案將小車放在空地上,小車的前方放置一個障礙物,開啟小車,將障礙物放在離小車20cm的地方,移動障礙物,察看小車的運行模式。
2、測試結果及分析(1)測試結果(數據)測距結果如下表所示: (單位/cm)
小車可以跟著障礙物運行
(2)測試分析與結論通過測試與檢測實現了超聲波測距,串口顯示,超聲波跟隨的功能。
綜上所述小車達到預計要求
五、結論與心得本次制作超聲波跟隨小車,實現了超聲波測距,串口顯示,超聲波跟隨的功能。滿足了制作要求。
通過這次制作,我們小組都收獲頗多。剛開始的時候遇到許多困難,但經過我們的努力,克服了重重困難,最終制作成功。這次制作超聲波跟隨小車不僅用到了以前學到的知識,還讓我們學到了很多之前沒有接觸過的內容,讓我們受益匪淺,同時也鍛煉了我們的動手能力,讓我們對單片機有了更進一步的認識。當然由于水平有限,小車存在些許不足。在制作過程中,由于有些模塊的損壞,程序的不精確,給我們的制作過程造成了很大的困擾,我們通過與其它小組的交流探討,查閱資料,更換模塊,逐步修改,并進行了多次實踐,終于制作成功。通過此次制作,我們不僅在理論知識方面豐富了自己,同時在實踐中也拓展了自己的思維方式。對于今后的課題制作是大有裨益。










 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

