|
�n���O(sh��)Ӌ(j��)�f����
�O(sh��)Ӌ(j��)�}Ŀ�� ���چ�Ƭ�C(j��)AT89C51ϴ�C(j��) ����ϵ�y(t��ng)�O(sh��)Ӌ(j��) �� �I(y��)�� �C(j��)е��ӹ���
�� ��(j��)�� �C(j��)�15-2��
�W(xu��) ̖(h��o)�� 3120150106229 �� ���� �� ָ��(d��o)�ώ��� ��
Ŀ� ժҪ............................................................................................................................................1 ��һ�� �wՓ..............................................................................................................................1 �ڶ��� �����O(sh��)Ӌ(j��)�cՓ�C..........................................................................................................2 2.1 ����һ...........................................................................................................................2 2.2 ����Փ�C�c�x��...........................................................................................................2 ������ ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)..........................................................................................................3 3.1 ���w�O(sh��)Ӌ(j��)����������...................................................................................................3 3.2 ��Ƭ�C(j��)���Ɔ�Ԫ ......................................................................................................... 3 3.3 ���Q����(b��o)���·�O(sh��)Ӌ(j��) ............................................................................................... 3 3.4��ʽ�����· ...............................................................................................................3 2. 3 �@ʾ�·�O(sh��)Ӌ(j��).............................................................................................................3 3.5 ������ģ�KӲ���O(sh��)Ӌ(j��)...................................................................................................3 3.6��Ƭ�C(j��)����ģ�K���O(sh��)Ӌ(j��)..........................................................................................3 3.7 �����·�O(sh��)Ӌ(j��)..........................................................................................................4 3.8 ֱ��늙C(j��)�(q��)��(d��ng)�·�O(sh��)Ӌ(j��)..........................................................................................5 ������ ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)............................................................................................................6 4.1 ܛ����Ҫ��������.........................................................................................................6 4.2 ��(bi��o)��(zh��n)��ʽ�\(y��n)�г����O(sh��)Ӌ(j��).................................................................................................6 4.3 ��(j��ng)��(j��)��ʽ�\(y��n)�г����O(sh��)Ӌ(j��).................................................................................................6 4.4 �Ϊ�(d��)��ʽ�\(y��n)�г����O(sh��)Ӌ(j��).................................................................................................6 4.6�������O(sh��)Ӌ(j��).....................................................................................................................8 ������ �����c�y(c��)ԇ..................................................................................................................8 5.1 ϴ�C(j��)����D.................................................................................................................9 5.1.1 ��(bi��o)��(zh��n)��ʽ����D......................................................................................................9 5.1.2 ��(j��ng)��(j��)��ʽ����D......................................................................................................10 5.1.3 �Ϊ�(d��)��ʽ����D......................................................................................................10 ���Y(ji��)............................................................................................................................................12 �����īI(xi��n)....................................................................................................................................12 ���1 ϵ�y(t��ng)�O(sh��)Ӌ(j��)ԭ��D...........................................................................................................13 ���2 ԭ������(x��)��...................................................................................................................14 ���3 ϵ�y(t��ng)Դ����...................................................................................................................15
ժҪ ��(du��)��һ�_(t��i)ȫ�Ԅ�(d��ng)ϴ�C(j��)���ԣ�����Ҫ�������ϴ�µĻ������ܣ�ͬ�r(sh��)߀Ҫ����(j��)�Ñ��IJ�ͬ�����O(sh��)�ÎN��ͬ��ϴ�³���߀Ҫ���]ˮ������r�Q��ϴ��ď�(qi��ng)����r������߀Ҫ��(du��)ϴ���^�̳��F(xi��n)�Ĺ����M(j��n)���\�࣬���C�����\(y��n)�D(zhu��n)�� ���O(sh��)Ӌ(j��)���Ԇ�Ƭ�C(j��)AT89C51оƬ�������ԭ�����cֱ��늙C(j��)��LED�@ʾ�·�Ș�(g��u)��ϴ�C(j��)ϵ�y(t��ng)�����Æ�Ƭ�C(j��)���Դ�·���r(sh��)��·����(f��)λ�·�Լ�ֱ��늙C(j��)�����·�����I�·�ȽM�ɡ����Ќ�(sh��)�r(sh��)�@ʾϴ�C(j��)���N������B(t��i)�����c(di��n)��ͬ�r(sh��)����c�Z(y��)�Ծ��̣���(sh��)�F(xi��n)��ϴ�C(j��)���Ԅ�(d��ng)�������O(sh��)Ӌ(j��)����Ҫ���������(xi��ng)���ķNϴ�¹�������(bi��o)��(zh��n)����(j��ng)��(j��)���Ϊ�(d��)������ˮ�������Џ�(qi��ng)����ϴ�칦�ܣ�Óˮ���ܡ�
�F(xi��n)��Ч����(ji��)�ܣ��h(hu��n)����ϴ�C(j��)���Ј�(ch��ng)��һֱռ��(j��)������(d��o)��λ��������S��Ӌ(j��)��C(j��)�����(hu��)�I(l��ng)��ĝB����Ƭ�C(j��)�đ�(y��ng)�����ڲ�����������룬ͬ�r(sh��)����(d��ng)���y(t��ng)ϴ�C(j��)�ĸ��°l(f��)չ����Ƭ�C(j��)���ճ��������\(y��n)�ñ��^�V����ϴ�C(j��)���ܿ���ϵ�y(t��ng)�����Ԇ�Ƭ�C(j��)���ƞ���ĵ����ܿ���ϵ�y(t��ng)����������ϴ�C(j��)�����IJ�����(ji��n)�λ��� �����书���@����ߣ� ߀�������y�Ԍ�(sh��)�F(xi��n)�Ĺ��ܣ� ͬ�r(sh��)Ҳ����˿��ƾ��_�ȡ� Ӳ���cܛ����Y(ji��)�ό�(sh��)�F(xi��n)��ϴ�C(j��)���ܻ����Ԅ�(d��ng)���� �S���˂�����ˮƽ�IJ�����ߣ� ��Ƭ�C(j��)���ܿ��Ɵo(w��)�����˂����Ŀ��(bi��o)֮һ�� ���o�˂��������ķ���Ҳ�Dz��ɹ�Ӌ(j��)�ġ� ��Ƭ�C(j��)���g(sh��)Ҳ�ڸ���(g��)�I(l��ng)��(y��ng)��Խ��Խ�V����ͬ�r(sh��)�Æ�Ƭ�C(j��)�O(sh��)Ӌ(j��)�ĸ��N�������Ҳ���˂����P(gu��n)ע�� һ�r(sh��)�gӿ�F(xi��n)��������ʽ���ӵ���������� �@Щ���������ԭ�����������ӵ��أ� �f����Ҳ�dž�Ƭ�C(j��)�\(y��n)�õķ����� ����ϴ�C(j��)����һ��(g��)���͵����ӣ� ���˂���(du��)����Ҫ��Խ��Խ�ߣ� Ҫ��F(xi��n)���������ṩ���õĸ�������O(sh��)ʩ����Ҫ�Ć�Ƭ�C(j��)���g(sh��)���֣� һ��������(sh��)�ֻ��� ���ܻ����Ʒ���l(f��)չ�� Ŀ ǰ��ϴ�C(j��)���]�Ќ�(sh��)�F(xi��n)ȫ����ļ��ݣ� ���ϴ�µďS�Ҷ�ע�ظ���Ʒ�Ƶ�ϴ�C(j��)�����L(zh��ng)�� ͻ��һ�ɂ�(g��)�c�e��ϴ�C(j��)��ͬ�Ă�(g��)�Ի��Ĺ��ܡ� ϴ�C(j��)�ĸ��(xi��ng)�������Ɇ�Ƭ�C(j��)���ƌ�(sh��)�F(xi��n)�ģ�Ŀǰ�Ї�(gu��)ϴ�C(j��)�Ј�(ch��ng)���M(j��n)�����?li��n)Q���ڣ� �Ј�(ch��ng)������ �˂���(du��)��ϴ�C(j��)��Ҫ��ҲԽ��Խ�ߣ� Ŀǰ��ϴ�C(j��)��Ҫ�Џ�(qi��ng)��ϴ�졢 �M(j��n)��ˮϵ�y(t��ng)�����Ԅ�(d��ng)�\�ࡢ ��ͣ���ߴ��ܣ� ���S���߀�����_(d��)���˂������� �@��Ҫ���O(sh��)Ӌ(j��)�߂��и��ߵČ��I(y��)�ͼ��g(sh��)ˮƽ�� �܉�������õĽ��h���µ��n�}�� ���˂�����Ҫ׃�ɬF(xi��n)��(sh��)�� �O(sh��)Ӌ(j��)������(ji��)�ܡ� ���ܸ�ȫ�桢 �����Ի���ȫ�Ԅ�(d��ng)ϴ�C(j��)�� �� 2 �� �����O(sh��)Ӌ(j��)
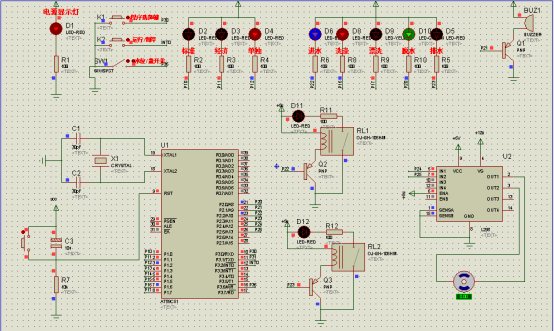
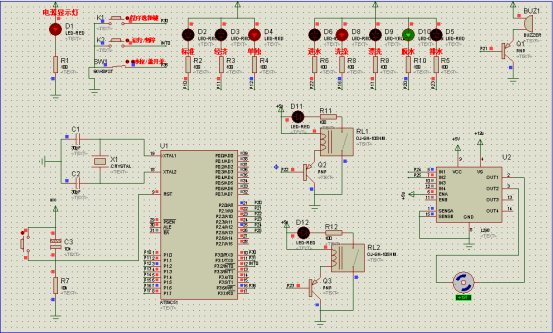
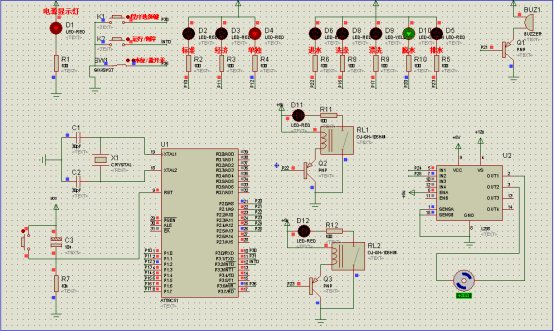
���Æ�Ƭ�C(j��)�O(sh��)Ӌ(j��)���� AT89C51 ��Ƭ�C(j��)�����Ԫ���� �ɕr(sh��)��·�� ��(f��)λ�·�� �Դ� CPU ����ģ�K 늙C(j��)�{(di��o)�ٿ���ģ�K �@ʾģ�K �Դģ�K ��(f��)λģ�K �r(sh��)�ģ�K ����ģ�K ���}�_�l(f��)���� 60 �M(j��n)��Ӌ(j��)��(sh��)�� ϴ��r(sh��)�gӋ(j��)��(sh��)�� �� �� �T �� �� �^ � �_ �P(gu��n) ��(zh��) �� � �C(j��) �r(sh��)�g�g�a ���� �Ô�(sh��)�� �@ʾ�·�� ���I�·�͈�(zh��)��늙C(j��)���ֽM�ɡ� 늙C(j��)�·����������l298�(q��)��(d��ng)оƬݔ�벻ͬ����̖(h��o)ʹ늙C(j��)�a(ch��n)�����D(zhu��n)�ͷ��D(zhu��n)�� �@ʾ�·���ð˂�(g��) LED �Ͱ˂�(g��)����c��Ƭ�C(j��)���B �� ���� C �Z(y��)�Ծ��̌�(sh��)�F(xi��n)ϴ�C(j��)�Ԅ�(d��ng)���@ʾ���ܡ� �˷����O(sh��)Ӌ(j��)��ϴ�C(j��)�����M(j��n)��ˮϵ�y(t��ng)�����Ԅ�(d��ng)�\�ࡢ ��ͣ�ȹ��ܡ�
��2�(y��) �� 3 �� ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��) Ӳ���O(sh��)Ӌ(j��)������(g��)ϵ�y(t��ng)�Ļ��A(ch��)�� Ҫ���]�ķ�������ܶ࣬ ���ˌ�(sh��)�F(xi��n)ϴ�C(j��)�����������⣬ ��Ҫ߀Ҫ���]���ׂ�(g��)���أ� ��ϵ�y(t��ng)��(w��n)���ȣ� ��������ͨ���Ի����xُ(g��u)�ԣ� �� ܛ�����̵���(sh��)�F(xi��n)�ԣ� ��ϵ�y(t��ng)�������ܼ�����ָ��(bi��o)�� ���Ӳ���O(sh��)Ӌ(j��)���P(gu��n)��Ҫ�� �F(xi��n)�ĸ�����ģ�K�Č�(sh��)�F(xi��n)����(g��)�M(j��n)�з���̽ӑ�� 3.1 ���w�O(sh��)Ӌ(j��)���������� ���O(sh��)Ӌ(j��)�Ԇ�Ƭ�C(j��) AT89C51����ƺ��ģ� ����ģ�K���O(sh��)Ӌ(j��)�� �������ׂ�(g��)����ģ�K��?ji��n)�Ƭ�C(j��)����ϵ�y(t��ng)ģ�K�� �Դģ�K�� �r(sh��)�ģ�K�� ��(f��)λģ�K�� ���I����ģ�K�� ֱ��늙C(j��)����ģ�K���@ʾģ�K�ȡ� ϴ�C(j��)��Ҫ���M(j��n)��ˮϵ�y(t��ng)�����Ԅ�(d��ng)�\�ࡢ ��ͣ�ȹ��ܡ� 3.2 ������ģ�KӲ���O(sh��)Ӌ(j��) 3.2. 1 ��Ƭ�C(j��)����ģ�K���O(sh��)Ӌ(j��) AT89C51��Ƭ�C(j��)��һ�N��Ч�������� Ҳ�ǵ��ĸ����܆�Ƭ�C(j��)�� ��Ƭ�C(j��)�DZ��O(sh��)Ӌ(j��)�ĺ�����Ҫ��������ã� ���� 40 ���_�p��ֱ����b��ʽ�� 32 ��(g��)�ⲿ�p��ݔ��/ݔ ����I/O���˿ڣ� ͬ�r(sh��)��(n��i)�� 2 ��(g��)���Д�ڣ� 2 ��(g��) 16 λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)��, 2 ��(g��)ȫ�p������ͨ�ſڣ���?y��n)������_��(sh��)Ŀ �����ƣ� �����в������_���еڶ����ܡ� ���μ����_������D 3-1 ��ʾ�� AT89C51��Ƭ�C(j��)����Ҫ���_���ܣ� VCC�� ���늉��� GND�� �ӵء� P0 �ڣ� P0 �ڞ�һ��(g��) 8 λ©��(j��)�_·�p�� I/O �ڣ� ÿ�_������ 8TTL �T����� ��(d��ng) P1 �ڵĹ��_��һ�Ό� 1 �r(sh��)�� �����x�����ݔ�롣 P0 �܉������ⲿ����(sh��)��(j��)�惦(ch��)���� �����Ա����x�锵(sh��)��(j��)/��ַ�ĵڰ�λ�� P1 �ڣ� P1 ����һ��(g��)��(n��i)���ṩ�������� 8 λ�p�� I/O �ڣ� P1 �ھ��_���ܽ���ݔ��4TTL �T����� P1 �ڹ��_���� 1 �� ����(n��i)��������ߣ� ������ݔ�룬 P1 �ڱ��ⲿ��������ƽ�r(sh��)�� ��ݔ������� �@�����ڃ�(n��i)�������ľ��ʡ� P2 �ڣ� P2 �ڞ�һ��(g��)��(n��i)���������� 8 λ�p�� I/O �ڣ� P2 �ھ��_���ɽ��գ� ݔ�� 4��(g��) TTL �T����� ��(d��ng) P2 �ڱ��� 1 �r(sh��)�� ����_����(n��i)������������ߣ� ������ݔ�롣 ���������ݔ��r(sh��)�� P2 �ڵĹ��_���ⲿ���ͣ� ��ݔ������� P3 �ڣ� P3 ���� 8 ��(g��)����(n��i)�����������p�� I/O �ڣ� �ɽ���ݔ�� 4 ��(g��) TTL �T�������(d��ng) P3 �ڌ��� 1 �� ��������(n��i)����������ƽ�� ������ݔ�롣 ����ݔ�룬 �����ⲿ��������ƽ�� P3 �ڌ�ݔ�������ILL�� �@�����������ľ��ʡ� RST�� ��(f��)λݔ�롣 ��(d��ng)��ʎ����(f��)λ�����r(sh��)�� Ҫ���� RST �_�ɂ�(g��)�C(j��)�����ڵĸ��ƽ�r(sh��)�g�� ALE/PROG�� ��(d��ng)�L���ⲿ�惦(ch��)���r(sh��)�� ��ַ�i�����S��ݔ���ƽ�����i���ַ�ĵ�λ�ֹ�(ji��)�� �� FLASH �������g�� �����_����ݔ�뾎���}�_�� ��ƽ�r(sh��)�� ALE ���Բ�׃���l������ݔ�����}�_��̖(h��o)�� ���l�ʞ���ʎ���l�ʵ� 1/6�� �������������(du��)�ⲿݔ�����}�_�����ڶ��r(sh��)Ŀ�ġ� PSEN �� �ⲿ����惦(ch��)�����xͨ��̖(h��o)�� �����ⲿ����惦(ch��)��ȡָ���g�� ÿ��(g��)�C(j��)�����ڃɴ� PSEN ��Ч�� �����L���ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)�� �@�ɴ���Ч�� PSEN ��̖(h��o)�������F(xi��n)�� EA/VPP�� ��(d��ng) EA���ֵ��ƽ�r(sh��)�� �t�ڴ����g�ⲿ����惦(ch��)����0000H-FFFFH���� �� ���Ƿ��Ѓ�(n��i)������惦(ch��)���� ע����ܷ�ʽ 1 �r(sh��)�� EA����(n��i)���i���� RESET�� ��(d��ng) EA�˱��ָ��ƽ�r(sh��)�� ���g��(n��i)������惦(ch��)������ FLASH �������g�� �����_Ҳ����ʩ�� 12V �����Դ ��VPP���� ��3�(y��) 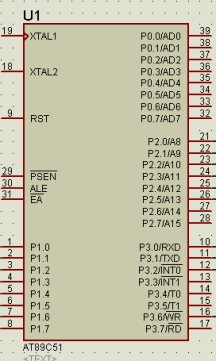 �D 3-1 AT89C51 ��Ƭ�C(j��)�Ĺ��_�D �Դ�� �r(sh��)���̖(h��o)�Լ���(f��)λ�·�dž�Ƭ�C(j��)�����Ļ����l���� ȱһ���ɡ� AT89C51 ��Ƭ�C(j��)ϵ�y(t��ng)�Ļ��������·�����Դ�·�� �r(sh��)��·�� ��(f��)λ�·�� ��M�ɷ���D��D 3-2 ��ʾ��
�D 3-2 ��Ƭ�C(j��)����ϵ�y(t��ng)����Ӳ���M�ɷ���D �Դ�· �Դ�·ģ�K��ϵ�y(t��ng)�·������ģ�K�ṩ+5V �Դ�� ����Դ�����_�P(gu��n)�Դ�ṩ�� �r(sh��)��·ģ�K���O(sh��)Ӌ(j��) ���� AT89C51��Ƭ�C(j��)оƬ��(n��i)�Еr(sh��)���ʎ�·�� ��˱�ϵ�y(t��ng)��Ƭ�C(j��)���Ã�(n��i)���r(sh��)犷�ʽ��ֻҪ�چ�Ƭ�C(j��)�� XTAL1�� XTAL2���_���ʯӢ���w���{(di��o)��ݣ� �͘�(g��u)�����Լ���ʎ�����چ�Ƭ�C(j��)��(n��i)���a(ch��n)���r(sh��)��}�_��̖(h��o)�� ���w�·�O(sh��)Ӌ(j��)��D 3-3 ��ʾ�� ����ԭ���� �r(sh��)���̖(h��o)ͨ���ÃɷN�·��ʽ�õ��� ��(n��i)����ʎ���ⲿ��ʎ�� �� XTAL1 �� XTAL2 ���_����Ӷ��r(sh��)Ԫ���� ���ܘ�(g��u)���Լ���ʎ�·�� ���r(sh��)Ԫ��ͨ������ʯӢ���w����ݽM�ɵIJ�(li��n)�C���·��һ����� C4 �� C5 ��Ҫ���l���{(di��o)���ã� ���ֵ���xȡ�� 30pF ���һ� 40pF���ң� ���w��ʎ���� ��(ji��n)�Q���� �侧���l�ʣ�fosc�� ������ 1. 2MHz~12MHz, ���O(sh��)Ӌ(j��)���x��12MHz�� ���w��ʎ�l��Խ�ߣ� ϵ�y(t��ng)�ĕr(sh��)��l��ҲԽ�ߣ� ��Ƭ�C(j��)���\(y��n)�����ʾ�Խ�졣 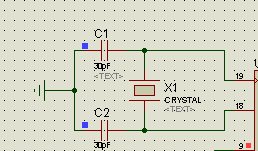
�D 3-3 �r(sh��)���ʎ�· ��(f��)λ�·ģ�K�O(sh��)Ӌ(j��) ��(f��)λ�·ʹ��Ƭ�C(j��)��ϵ�y(t��ng)�е���������̎��ij�N�_���Ġ�B(t��i)�� ��(d��ng)�� MCS-51 ϵ�І�Ƭ�� RST ���_̎������ƽ������ 2 ��(g��)�C(j��)�����ڣ� ��Ƭ�C(j��)��(n��i)���͈�(zh��)�Џ�(f��)λ������ ��(f��)λ�����ЃɷN������ʽ�� һ�N����늏�(f��)λ�� ��һλ�ǰ��I��(f��)λ�� ���O(sh��)Ӌ(j��)���ð��I��(f��)λ��ʽ�� ��D 3-4 ����ԭ���� ��(d��ng)���°��I�r(sh��)�� RST ֱ���c VCC ���B�� ���F(xi��n) 2 ��(g��)���ϵĸ��ƽ�γɏ�(f��)λ�� ͬ�r(sh��)늽���ݱ���·��늣� ���I���_�r(sh��)�� ��ݳ�늣� ������^��裬 RST ����ƽ�� ��Ȼ�Ǐ�(f��)λ�������ɺ� ����ஔ(d��ng)���_·�� RST ����ƽ�� ���������� 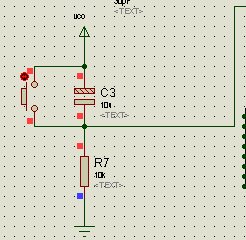
�D 3-4 ��(f��)λ�· - 2 �����·�O(sh��)Ӌ(j��) ��Ƭ�C(j��)�O(sh��)Ӌ(j��)�У� ��Ҫ��һ��(g��)ģ�K�ǰ��I���O(sh��)Ӌ(j��)�� ��Ҋ�Ć�Ƭ�C(j��)���I�O(sh��)Ӌ(j��)�֞骚(d��)��ʽ������ʽ�����ʽ���� ��(d��)��ʽ���I�O(sh��)Ӌ(j��)��(ji��n)�Σ� ��ռ�� I/O ���^�ࣻ ����ʽ���I�O(sh��)Ӌ(j��)����(du��)��(f��)�s�� ռ�� I/O ���^�١� ��D 3-5 ��ʾ��
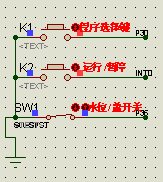
��D 3-5 �D 3-5 �����· �鷽��ʹ��, �O(sh��)Ӌ(j��)�� ����(g��)��(d��)��ʽ���I�� �քe������x���I��ˮλ/�w�_�P(gu��n) ���\(y��n)��/��ͣ �� 1. �����x���I�� �����x��ϴ�·�ʽ�� ���ڱ��O(sh��)Ӌ(j��)���� 3�Nϴ�¹������� ����(bi��o)��(zh��n)���� ��(j��ng)��(j��)���� �Ϊ�(d��)���� �����O(sh��)Ӌ(j��)�����x���I�� �\(y��n)��/��ͣ�x���I�� ���ڱ��O(sh��)Ӌ(j��)Ҫ��ϴ�C(j��)������ʲô��B(t��i)�� ��(d��ng)����ͣ�I�r(sh��)�� ϴ�C(j��)�蕺ͣ������ ������(d��ng)�I���º�ϴ�C(j��)���ܰ�ԭ�����x��Ĺ�����ʽ�^�m(x��)�����������O(sh��)Ӌ(j��)ԓ���I�� ˮλ/�w�_�P(gu��n)�����ڙz�y(c��)�M(j��n)ˮ����ˮ��(du��)ˮλ�ęz�y(c��)���Լ���(d��ng)ϴ���Óˮ�^����������_��ϴ�C(j��)�w�M(j��n)�Ј�(b��o)���� 3.3���Q����(b��o)���·�O(sh��)Ӌ(j��) ���O(sh��)Ӌ(j��)�У���(d��ng)ij��(g��)ϴ�·�����ȫ�Y(ji��)������(hu��)�з��Q�� 5S 犵Ĉ�(b��o)���r(sh��)�g�� ���Q���·�O(sh��)Ӌ(j��)��D 3-3��ʾ�� �Ɇ�Ƭ�C(j��)ֱ��ݔ������̖(h��o)�������(q��)��(d��ng)���Q���Ĺ�������ˣ��چ�Ƭ�C(j��)�c���Q��֮�g��һ��(g��) PNP ���O�������(q��)��(d��ng)�����O�ܵĻ��Oͨ�^һ��(g��) 4.7K �W������c��Ƭ�C(j��)����(y��ng)�� I/O ���B���Դ�ͷ��Q���c�l(f��)��O�O���B����늘O�ӵء��@�Ӿ�����˷��Q�����(q��)��(d��ng)�·�� 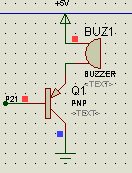
�D 3-3 ���Q���(q��)��(d��ng)�· 3.4 ��ʽ�����· �·��D 4-6 ��ʾ ��ʽ�����·��ʹ������һ�N�����·���벨�����·��һ�N�(ji��n)�ε������·�������Դ׃���� B ���������O�� D ��ؓ(f��)�d��� Rfz �M�ɡ�׃���������늉������� 220 ����׃�Q������Ҫ�Ľ�׃늉� E2��D �ٰѽ����׃�Q���}��(d��ng)ֱ��늡��@�N�·��ֻҪ��ֻ���O�ܿ��B�ӳɡ���ʽ�Y(ji��)��(g��u)�������ȫ�������·�ă�(y��u)�c(di��n)����ͬ�r(sh��)��һ���̶��Ͽ˷�������ȱ�c(di��n)�� �D 4-6 ��ʽ�����· ��ʽ�����·�Ĺ���ԭ�����£�E2 �������ܕr(sh��)����(du��) D1��D3 �ͷ���늉���Dl��D3 ��(d��o)ͨ�� ��(du��) D2��D4 �ӷ���늉���D2��D4 ��ֹ���·�И�(g��u)�� e2��Dl��Rfz ��D3 ͨ늻�·���� Rfz �����γ�������ؓ(f��)�İ벨��ϴ늉���E2 ��ؓ(f��)���ܕr(sh��)����(du��) D2��D4 ������늉���D2��D4 ��(d��o)ͨ����(du��)D1��D3 �ӷ���늉���D1��D3 ��ֹ���·�И�(g��u)�� E2��D2��Rfz ��D4 ͨ늻�·��ͬ���� Rfz ���γ�������ؓ(f��)������벨������늉�������؏�(f��)��ȥ���Y(ji��)���� Rfz ���ϱ�õ�ȫ������늉����䲨�ΈD��ȫ���������ΈD��һ�ӵġ��ĈD 3-6 ��߀���y��������ʽ�·��ÿֻ���O�ܳ��ܵķ���늉�����׃�����μ�(j��)늉������ֵ����ȫ����ϴ�·Сһ�롣�@�ӾͿɌ������������ֱ��늡�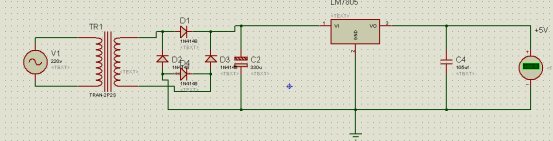 �D 4-6 ��ʽ�����· 2. 3 �@ʾ�·�O(sh��)Ӌ(j��) �چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�У� ��(du��)��ϵ�y(t��ng)���\(y��n)�Р�B(t��i)���\(y��n)�нY(ji��)���� ͨ������Ҫֱ�^�@ʾ���������O(sh��)Ӌ(j��)���õ���8��(g��)���(y��ng)�O�l(f��)����O���@ʾ�� �@ʾ�·��D 3-6 ��ʾ�� �@ʾ�·�Ͱ˂�(g��)LED �Ͱ˂�(g��)��蘋(g��u)�ɡ� �˂�(g��)��趼�քe�� 100 �Wķ�� ���·�У� ������������o(h��)���ã� ��ֹ LED �����ġ� �˂�(g��) LED �ǹ��(y��ng)��(j��)�� ��(d��ng)ݔ����ƽ�r(sh��) LED �c(di��n)���� ��(d��ng)ݔ����ƽ�r(sh��) LED Ϩ�硣
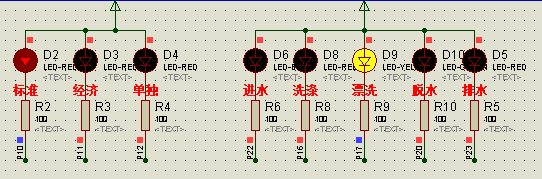 �D 3-6 �@ʾ�· �D 3-6 �@ʾ�·
2. 4 ֱ��늙C(j��)�(q��)��(d��ng)�·�O(sh��)Ӌ(j��) �D 3-7 ֱ�����C(j��)�· 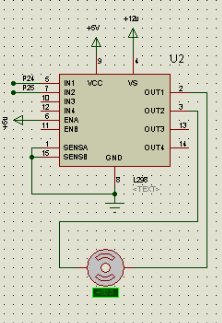
�D 3-7 ��ʾ��һ��(g��)���͵�ֱ��늙C(j��)�����·�� ֱ��늙C(j��)�Ŀ���ͨ�^l298늙C(j��)�(q��)��(d��ng)оƬ������ͬ�r(sh��)���ƃɂ�(g��)늙C(j��)����(d��ng)IN1��IN2ͬ�r(sh��)ݔ����ƽ���ߵ��ƽ��늙C(j��)ֹͣ���D(zhu��n)����(d��ng)IN1ݔ����ƽIN2ݔ����ƽ�r(sh��)늙C(j��)���D(zhu��n)��IN1ݔ����ƽIN2ݔ����ƽ�r(sh��)늙C(j��)���D(zhu��n)��ͬ�r(sh��)ENA��ENB�քe��ʹ�ܶˣ��܌�(du��)늙C(j��)1��늙C(j��)�M(j��n)��PWM�ٶȿ��ơ�
�� 4 �� ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) ܛ����Ӳ��ƽ�_(t��i)�Ϙ�(g��u)���� ��ɸ�����Ӳ���Ŀ��ƺͅf(xi��)�{(di��o)�� ϵ�y(t��ng)��������ܛӲ����ͬ��(sh��)�F(xi��n)�ģ� ����ܛ���Ŀ���s�ԣ� ��K��(sh��)�F(xi��n)��ϵ�y(t��ng)���ܿɏ�(qi��ng)������ ��e���ܴܺ� ܛ������ģ�K���O(sh��)Ӌ(j��)������ ���H���ھ��̺��{(di��o)ԇ�� Ҳ�ɜpСܛ�������ʺ����ܛ���Ŀɿ��ԡ�ͬ�r(sh��)�� ��(du��)ܛ���M(j��n)��ȫ��y(c��)ԇҲ�Ǚz�(y��n)�e(cu��)�`�ų����ϵ���Ҫ�ֶΡ� ���ھ��̶��漰����(sh��)ֵ�\(y��n)�㣬 ���^��(f��)�s�� ߀�� LCD �����@ʾ�O(sh��)Ӌ(j��)������Ҫ�����x���Д࣬ ���҂�ƽ�r(sh��)���õąR���Z(y��)�Ծ����Ǻ��y��(sh��)�F(xi��n)�ģ� �@���҂��x���� ��ֵ�Ժá� �Y(ji��)��(g��u)������ ���M(j��n)�Џ�(f��)�s�\(y��n)��� C�Z(y��)�ԁ팍(sh��)�F(xi��n)���̡� 1 ܛ����Ҫ��������
�D 4-1 ��Ҫ�������̈D ����(g��)ϵ�y(t��ng)�Ĺ�������Ӳ���·���ܛ���팍(sh��)�F(xi��n)�ģ� ��(d��ng)Ӳ���������͵ĕr(sh��)��ܛ��Ҳ���������ˣ� ��ܛ���Ĺ��ܲ�ͬ�� ���Է֞�ɵ�� һ�DZO(ji��n)��ܛ���������� ��������(g��)ܛ���ĺ��ģ� ���T�Á�f(xi��)�{(di��o)����(g��)��(zh��)��ģ�K�Ͳ����ߵ�(li��n)ϵ�� ���Lj�(zh��)��ܛ�����ӳ��� �����Á���ɸ��N��(sh��)�|(zh��)�ԵĹ����ģ� ��y(c��)���� Ӌ(j��)�㡢 �@ʾ�� ͨӍ�ȡ� ÿһ��(g��)��(zh��)��ܛ������һ��(g��)С�Ĉ�(zh��)��ģ�K�� �@�ÿһ��(g��)ģ�Kһһ�г����� ����ÿ��(g��)��(zh��)��ģ�K�M(j��n)�й��ܶ��x�ͽӿڶ��x�� ����(zh��)��ģ�KҎ(gu��)�����Ժ� �Ϳ���Ҏ(gu��)���O(ji��n)��ܛ���ˡ� ����Ҫ����(j��)ϵ�y(t��ng)�Ŀ��w�����x��һ�N����m�ıO(ji��n)�س���Y(ji��)��(g��u)�� Ȼ�����(j��)��(sh��)�r(sh��)�Եėl���� �������űO(ji��n)��ܛ���͈�(zh��)��ܛ��֮�g���{(di��o)���P(gu��n)ϵ�� 2 ��(bi��o)��(zh��n)��ʽ�\(y��n)�г����O(sh��)Ӌ(j��) ��(bi��o)��(zh��n)��ʽ����(sh��) ��(j��ng)��(j��)��ʽ����(sh��) �Ϊ�(d��)��ʽ����(sh��) �M(j��n)ˮ��ʽ����(sh��) ��ˮ��ʽ����(sh��) ������(sh��) ��(bi��o)��(zh��n)��ʽ�\(y��n)�г������҂���õ�ϴ�³��� ��(bi��o)��(zh��n)�������� �M(j��n)ˮ����ϴ�졪����ˮ�����M(j��n)ˮ����Ưϴ1������ˮ�����M(j��n)ˮ����Ưϴ2������ˮÓˮ�� 3 ��(j��ng)��(j��)��ʽ�\(y��n)�г����O(sh��)Ӌ(j��) �D 4-3 ��(j��ng)��(j��)��ʽ�\(y��n)�����̈D ��(j��ng)��(j��)��ʽ�\(y��n)�г������҂��F(xi��n)��ϴ�C(j��)��һ��(g��)���c(di��n)�� ��(j��ng)��(j��)�������̞� �M(j��n)ˮ����ϴ�졪����ˮ�����M(j��n)ˮ����Ưϴ1������ˮÓˮ�� 4 �Ϊ�(d��)��ʽ�\(y��n)�г����O(sh��)Ӌ(j��) ����ϴ�C(j��)��(du��)��ͬ����r�в�ͬ����Ҫ�� �O(sh��)Ӌ(j��)�ˆΪ�(d��)�\(y��n)�г��� �Ϊ�(d��)�������M(j��n)ˮ��ϴ�졪��ˮÓˮ ˮ�M���Ժ�ֱ���M(j��n)��ϴ�졣
�� 5 �� �����c�{(di��o)ԇ 1 ϴ�C(j��)����D 1 . 1 ��(bi��o)��(zh��n)��ʽ����D 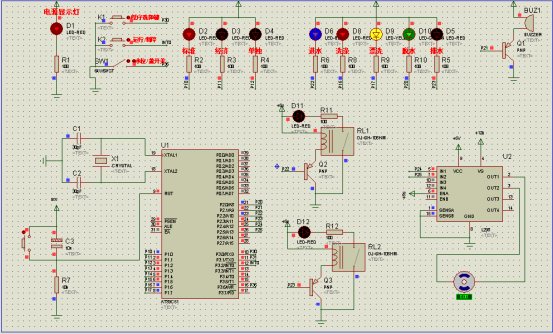
�_ʼ�M(j��n)ˮ 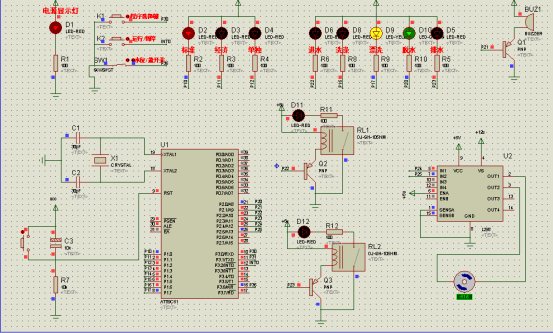
����ϴ�� 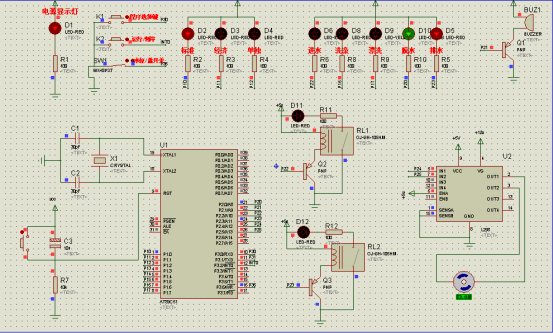
����Ưϴ 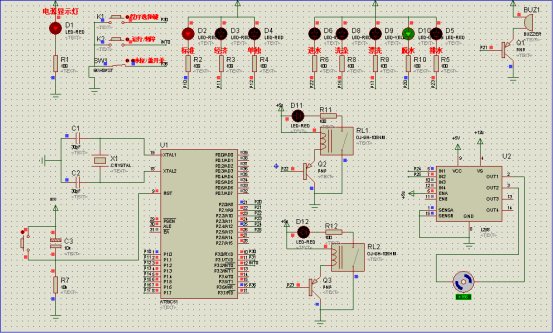
��ˮ��Óˮ �D 5-1 ��(bi��o)��(zh��n)��ʽ����D
1 . 2 ��(j��ng)��(j��)��ʽ����D 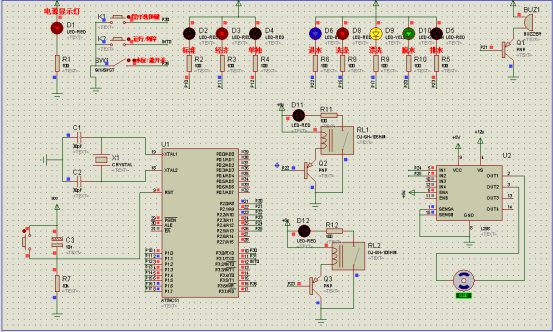
�_ʼ�M(j��n)ˮ 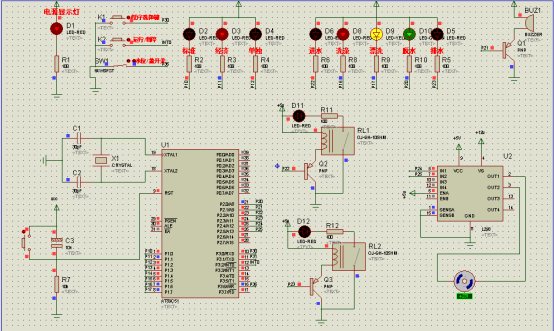
����ϴ�� 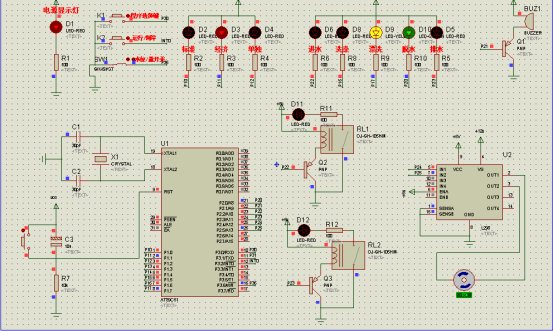
����Ưϴ 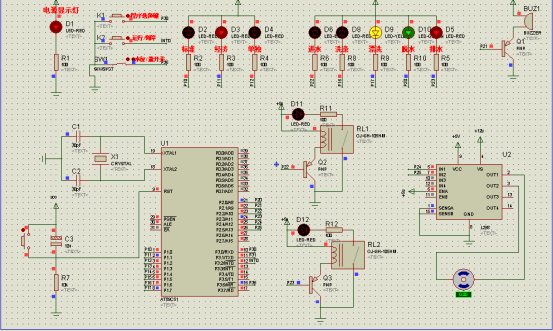
�_ʼ��ˮÓˮ 1 . 2 ��(j��ng)��(j��)��ʽ����D 1 . 3 �Ϊ�(d��)��ʽ����D
�_ʼ�M(j��n)ˮ
����ϴ��
��ˮÓˮ 1 . 3 �Ϊ�(d��)��ʽ����D
�� �Y(ji��) ��Ҫ���� AT89C51��Ƭ�C(j��)����ĵģ� ��(du��)ϴ�C(j��)�M(j��n)���˺�(ji��n)�ε��O(sh��)Ӌ(j��)�c�U���� �����O(sh��)Ӌ(j��)�����f��ܛӲ�Y(ji��)�ϣ� ����Ӳ�������� ܛ�����o�� ��(d��ng)��Ƽ��l(f��)չѸ�٣���Ƭ�C(j��)Ƕ��ʽ�_�l(f��)����������ǰ���� ���چ�Ƭ�C(j��)���н�(j��ng)��(j��)��(sh��)�á� �_�l(f��)��(ji��n)������c(di��n)�� ������Ȼ�ڹ��I(y��)���ơ� ��늵��I(l��ng)��ռ��(j��)�V�����Ј�(ch��ng)�� �������x���@�ӵĮ��I(y��)�O(sh��)Ӌ(j��)�n�}�� ������ͨ�^�˴��O(sh��)Ӌ(j��)������Լ�ܛ�����ƺ�Ӳ���·�O(sh��)Ӌ(j��)�������� ��������@�ή��I(y��)�O(sh��)Ӌ(j��)���^���У� ��(d��ng)�����Լ������I(y��)֪�R(sh��)���ڽ�Q��(sh��)�H�Ć��}�r(sh��)�� �Ƿݳɾк�ϲ�������y�����ݵġ� ���ǣ� �ڌ�(sh��)�H�ľ����Լ��{(di��o)ԇ�����^���У� �Ұl(f��)�F(xi��n)�Լ���(y��ng)ԓ�W(xu��)�Ė|��̫��̫�ࡣ�⿿�Լ��ڕ��������W(xu��)�^���@�c(di��n)֪�R(sh��)���h(yu��n)�h(yu��n)����ģ� �������J(r��n)�R(sh��)���� �������njW(xu��)��(x��)�ĵ����� ��������ǰ��(du��) 52 ��Ƭ�C(j��)�� C �Z(y��)�ԛ]���J(r��n)���@���^�� ���Ը��X���I(y��)�O(sh��)Ӌ(j��)���΄�(w��)ʮ�־o�ȡ� ͨ�^��(du��)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�� �ҌW(xu��)��(x��)����Ӳ���_�l(f��)��ܛ���_�l(f��)�Ļ������̲�����һ�����{�����_�l(f��)�^�̵������� ���̵��^���У� �mȻ�������࣬ ��������dz����{(di��o)ԇ�ɹ����ϲ���� ��֮�� �@�ή��I(y��)�O(sh��)Ӌ(j��)��(du��)�ҁ��f��һ�α��^ȫ��ġ� ���Є�(chu��ng)���Ժ�̽���Ե�呟��� ��������x�}�r(sh��)����Ը�� �������и��|�� ��(du��)���ҽ��ČW(xu��)��(x��)�� �����������������ǜ\�ģ�
- #include <reg51.h>
- #define uchar unsigned char
- #define uint unsigned int
- #define Enable(); EA=1;
- #define Disable(); EA=0;
- #define BIAOZHUN 0
- #define JINGJI 1
- #define DANDU 2
- #define PAISHUI 3
- #define QIANGXI 0
- #define RUOXI 1
- #define T_JinShui 240 //4min*60s
- #define T_PaiShui 60 //1min*60s
- #define T_XiDi 360 //6min*60s
- #define T_PiaoXi_1 240 //4min*60s
- #define T_PiaoXi_2 120 //2min*60s
- #define T_TuoShui 120 //2min*60s
- #define ZHENGZHUAN 0
- #define STOP 1
- #define FANZHUAN 2
- #define ZhengZhuan(); PIN_Motor_A = 0; PIN_Motor_B = 1;
- #define Stop(); PIN_Motor_A = 1; PIN_Motor_B = 1;
- #define FanZhuan(); PIN_Motor_A = 1; PIN_Motor_B = 0;
- /*******************��ͣ���^�m(x��)���ƺ궨�x*****************/
- #define ZanTing(); ET0 = 0; ET1 = 0; Stop();
- #define JiXu(); ET0 = 1; ET1 = 1;
- #define flag_Ok (flag_JinShui||flag_PaiShui||flag_XiDi||flag_PiaoXi||flag_TuoShui)
- /*************************���_���x***********************/
- sbit LED_BiaoZhun = P1^0; //��(bi��o)��(zh��n)�����@ʾ��
- sbit LED_JingJi = P1^1; //��(j��ng)��(j��)�����@ʾ��
- sbit LED_DanDu = P1^2; //�Ϊ�(d��)�����@ʾ��
- sbit LED_PaiShui = P1^3; //��ˮ�����@ʾ��
- sbit LED_XiDi = P1^6; //ϴ���B(t��i)��
- sbit LED_PiaoXi = P1^7; //Ưϴ��B(t��i)��
- sbit LED_TuoShui = P2^0; //Óˮ��B(t��i)��
- sbit PIN_BaoJing = P2^1; //��(b��o)������
- sbit PIN_JinShui = P2^2; //�M(j��n)ˮ����
- sbit PIN_PaiShui = P2^3; //��ˮ����
- sbit PIN_Motor_A = P2^4; //늙C(j��)�_A
- sbit PIN_Motor_B = P2^5; //늙C(j��)�_B
- sbit K_SEL_ChengXu = P3^0; //�x������I
- sbit p32 = P3^2;
- sbit p33 = P3^3;
- sbit SW_ShuiWei = P3^6; //ˮλ�_�P(gu��n)
- sbit SW_AnQuan = P3^7; //��ȫ�_�P(gu��n)
- void Programme_PaiShui(void);
- /*************************��(sh��)��(j��)���x***********************/
- uchar flag_SEL_ChengXu; //Ĭ�J(r��n)���(bi��o)��(zh��n)����
- bit flag_Run; //�\(y��n)�И�(bi��o)־��1���\(y��n)��
- bit flag_JinShui; //�M(j��n)ˮ��(bi��o)־��1���M(j��n)ˮ
- bit flag_PaiShui; //��ˮ��(bi��o)־��1����ˮ
- bit flag_XiDi; //��ϴ���(bi��o)־
- bit flag_PiaoXi; //��Ưϴ��(bi��o)־
- bit flag_TuoShui; //Óˮ��(bi��o)־
- bit flag_BaoJing; //��(b��o)����(bi��o)־
- uchar _50ms; //ÿ50ms��һ�ε�׃��
- uint s; //��
- uint T_S; //���r(sh��)���r(sh��)�g
- uchar T_Motor; //늙C(j��)���ƕr(sh��)�g
- /*************************�ӕr(sh��)����*********************/
- void Delay_10ms(uint T1)
- { uint t1,t2;
- for(t1=0;t1<T1;t1++)
- for(t2=0;t2<1250;t2++);//10ms
- }
- /**********************���_��ʼ������******************/
- void Pin_Init(void)
- { LED_BiaoZhun = 0;
- LED_JingJi = 1;
- LED_DanDu = 1;
- LED_PaiShui = 1;
- LED_XiDi = 1;
- LED_PiaoXi = 1;
- LED_TuoShui = 1;
- PIN_BaoJing = 1;
- PIN_JinShui = 1;
- PIN_PaiShui = 1;
- PIN_Motor_A = 1;
- PIN_Motor_B = 1;
- }
- /********************�Д��ʼ������********************/
- void ExInt_Init(void)
- { IT0 = 1;
- EX0 = 1;
- IT1 = 1;
- EX1 = 1;
- }
- /*******************���r(sh��)��0��ʼ������******************/
- void Timer0_Init(void)
- { TMOD = TMOD | 0X01; //���r(sh��)��ʽ1
- TH0 = 0X3C; //50ms
- TL0 = 0XB0;
- TR0 = 1;
- _50ms = 0;
- s = 0;
- }
- /*******************���r(sh��)��1��ʼ������******************/
- void Timer1_Init(void)
- { TMOD = TMOD | 0X10; //���r(sh��)��ʽ1
- TH1 = 0X3C; //50ms
- TL1 = 0XB0;
- }
- /********************늙C(j��)��ʼ������********************/
- void T_Motor_Ctl(uchar t1,uchar t2,uchar t3)
- { if(1)
- T_Motor = t1;
- if(0)
- T_Motor = t2;
- if(flag_TuoShui)
- T_Motor = t3;
- }
- /********************늙C(j��)��ʼ������********************/
- void Motor_Init(void)
- { ZhengZhuan();
- T_Motor_Ctl(4,3,5);
- }
- /**********************�����(b��o)��************************/
- void No_BaoJing(void)
- { flag_BaoJing= 0; //�È�(b��o)����(bi��o)־
- PIN_BaoJing = 1; //��(b��o)������
- TR1 = 0;
- }
- /*******�ⲿ�Д�0����?y��n)��\(y��n)�С������(b��o)�����ߕ�ͣ***********/
- void int0(void) interrupt 0
- {
- if(!p32)
- { Delay_10ms(1); //�ӕr(sh��)10ms���ң�ȥ����(d��ng)
- if(!p32)
- { if(!flag_Run)
- flag_Run = 1; //���\(y��n)�И�(bi��o)־
- else if(flag_BaoJing)
- No_BaoJing(); //�����(b��o)��
- else if(flag_Ok)
- { static bit flag_ZanTing;
- flag_ZanTing = ~flag_ZanTing;
- if(flag_ZanTing)
- {ZanTing();}
- else
- {JiXu();}
- }
- }
- }
- }
- /**********************��(b��o)������************************/
- void BaoJing(void)
- { flag_BaoJing= 1; //�È�(b��o)����(bi��o)־
- TR0 = 0;
- TR1 = 1;
- }
- /*******************�r(sh��)�g��̎������*********************/
- void Ok_Timer(void)
- { s = 0;
- if(flag_JinShui || flag_PaiShui) //�M(j��n)ˮ��~����ˮ��~
- { BaoJing(); //��(b��o)������
- }
- else
- { flag_XiDi = 0; //��ϴ���(bi��o)־
- flag_PiaoXi = 0; //��Ưϴ��(bi��o)־
- flag_TuoShui= 0; //��Óˮ��(bi��o)־
- Stop();
- }
- }
- /********************늙C(j��)���Ƴ���**********************/
- void Motor(void)
- { static uchar s_Motor;
- s_Motor++;
- if(s_Motor==T_Motor)
- { static uchar Motors;
- s_Motor = 0;
- Motors++;
- if(Motors==3)
- Motors = 0;
- switch(Motors)
- { case ZHENGZHUAN : ZhengZhuan();
- T_Motor_Ctl(4,3,5);
- break;
- case STOP : Stop();
- T_Motor_Ctl(1,2,2);
- break;
- case FANZHUAN : FanZhuan();
- T_Motor_Ctl(4,3,5);
- break;
- default : break;
- }
- }
- }
- /*******************���r(sh��)��0�����********************/
- void Timer0(void) interrupt 1
- {
- TR0 = 0; //ֹͣӋ(j��)��(sh��)
- TH0 = 0X3C; //���b���r(sh��)��ֵ
- TL0 = 0XB0;
- TR0 = 1;
- _50ms++;
- if(_50ms == 20) //1s��
- { _50ms = 0;
- s++;
- if(s == T_S)
- Ok_Timer();
- if(flag_XiDi || flag_PiaoXi || flag_TuoShui)
- Motor(); //늙C(j��)���Ƴ���
- }
- }
- /**********�ⲿ�Д�1����?y��n)�ˮλ�������w�_̎��***********/
- void int1(void) interrupt 2
- { if(!p33)
- { Delay_10ms(1); //�ӕr(sh��)10ms���ң�ȥ����(d��ng)
- if(!p33)
- {
- }
- }
- }
- /************���r(sh��)��1����������W�q����(b��o)��**************/
- void Timer1(void) interrupt 3
- { static uchar _50ms; //ÿ50ms��һ�ε�׃��
- TR1 = 0; //ֹͣӋ(j��)��(sh��)
- TH1 = 0X3C; //���b���r(sh��)��ֵ
- TL1 = 0XB0;
- TR1 = 1;
- _50ms++;
- if(_50ms == 14)
- { _50ms = 0;
- if(flag_XiDi) //ϴ����~
- LED_XiDi = ~LED_XiDi; //ϴ���B(t��i)���W�q
- if(flag_PiaoXi) //Ưϴ��~
- LED_PiaoXi = ~LED_PiaoXi; //Ưϴ��B(t��i)���W�q
- if(flag_TuoShui) //Óˮ��~
- LED_TuoShui = ~LED_TuoShui; //Óˮ��B(t��i)���W�q
- if(flag_BaoJing)
- PIN_BaoJing = ~PIN_BaoJing; //��(b��o)��
- }
- }
- /**********************�����x�����********************/
- void SEL_ChengXU(void)
- { if(!K_SEL_ChengXu)
- { Delay_10ms(1); //�ӕr(sh��)10ms���ң�ȥ����(d��ng)
- if(!K_SEL_ChengXu)
- { while(!K_SEL_ChengXu);
- flag_SEL_ChengXu++;
- if(flag_SEL_ChengXu==4)
- flag_SEL_ChengXu = 0;
- switch(flag_SEL_ChengXu)
- { case BIAOZHUN : LED_BiaoZhun= 0; //��
- LED_JingJi = 1; //��
- LED_DanDu = 1; //��
- LED_PaiShui = 1; //��
- break;
- case JINGJI : LED_BiaoZhun= 1;
- LED_JingJi = 0;
- LED_DanDu = 1;
- LED_PaiShui = 1;
- break;
- case DANDU : LED_BiaoZhun= 1;
- LED_JingJi = 1;
- LED_DanDu = 0;
- LED_PaiShui = 1;
- break;
- default : break;
- }
- }
- }
- }
- /**********************�M(j��n)ˮ����***********************/
- void JinShui(void)
- { PIN_JinShui = 0;
- flag_JinShui = 1;
- TR1 = 0;
- Timer0_Init();
- T_S = T_JinShui;
- while(SW_ShuiWei);
- PIN_JinShui = 1;
- flag_JinShui = 0;
- TR0 = 0;
- TF0 = 0;
- }
- /**********************��ˮ����***********************/
- void PaiShui(void)
- { PIN_PaiShui = 0;
- flag_PaiShui = 1;
- TR1 = 0;
- Timer0_Init();
- T_S = T_PaiShui;
- while(!SW_ShuiWei);
- TR0 = 0;
- TF0 = 0;
- Delay_10ms(500);//�ӕr(sh��)50s
- PIN_PaiShui = 1;
- flag_PaiShui = 0;
- }
- /**********************ϴ�����***********************/
- void XiDi(void)
- { flag_XiDi = 1;
- TR1 = 1;
- Timer0_Init();
- T_S = T_XiDi;
- Motor_Init();
- while(flag_XiDi);
- TR1 = 0;
- LED_XiDi = 1;
- }
- /**********************Ưϴ����***********************/
- void PiaoXi(uchar t)
- { flag_PiaoXi = 1;
- TR1 = 1;
- Timer0_Init();
- T_S = t;
- Motor_Init();
- while(flag_PiaoXi);
- }
- /*********************�w�_���o(h��)����********************/
- void BaoHu_GaiKai(void)
- { if(SW_AnQuan)
- { ZanTing();
- LED_TuoShui = 1;
- }//end if
- else
- { JiXu();
- }
- }
- /***********************Óˮ����**********************/
- void TuoShui(void)
- { flag_TuoShui = 1;
- PIN_PaiShui = 0;
- TR1 = 1;
- Timer1_Init();
- T_S = T_TuoShui;
- Motor_Init();
- while(flag_TuoShui)
- { BaoHu_GaiKai();
- }
- TR1 = 0;
- LED_TuoShui = 1;
- }
-
- /********************��(bi��o)��(zh��n)ϴ�³���*********************/
- void Programme_BiaoZhun(void)
- { LED_XiDi = 0; //ϴ���B(t��i)��
- LED_PiaoXi = 0; //Ưϴ��B(t��i)��
- LED_TuoShui = 0; //Óˮ��B(t��i)��
- JinShui();
- XiDi();
- PaiShui();
- JinShui();
- PiaoXi(T_PiaoXi_1);//4min*60s//4*60
- PaiShui();
- JinShui();
- PiaoXi(T_PiaoXi_2);//2min*60s//2*60
- Programme_PaiShui();
- }
- /********************��(j��ng)��(j��)ϴ�³���*********************/
- void Programme_JingJi(void)
- { TR1 = 0;
- LED_XiDi = 0; //ϴ���B(t��i)��
- LED_PiaoXi = 0; //Ưϴ��B(t��i)��
- LED_TuoShui = 0; //Óˮ��B(t��i)��
- JinShui();
- XiDi();
- PaiShui();
- JinShui();
- PiaoXi(T_PiaoXi_1);//4min*60s
- Programme_PaiShui();
- }
- /********************�Ϊ�(d��)ϴ�³���*********************/
- void Programme_DanDu(void)
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
������Word��ʽ�ęn51�����d��ַ��
 ϴ�C(j��)����ϵ�y(t��ng)�n���O(sh��)Ӌ(j��).docx
(264.49 KB, ���d��(sh��): 77)
ϴ�C(j��)����ϵ�y(t��ng)�n���O(sh��)Ӌ(j��).docx
(264.49 KB, ���d��(sh��): 77)
2018-7-3 11:27 �ς�
�c(di��n)���ļ������d����
ϴ�C(j��)�n���O(sh��)Ӌ(j��)
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664


