|
�n���O(sh��)Ӌ(j��)�f����
�} Ŀ���댧(d��o)�w����Ƭ�ضȿ���
ժ Ҫ �ض��ǹ��I(y��)�зdz��P(gu��n)�I��һ�(xi��ng)�����������r(n��ng)�I(y��)���F(xi��n)���ƌW(xu��)�о����N���¼��g(sh��)���_�l(f��)���о���Ҳ��һ��(g��)�dz��ձ�ͳ��õĜy(c��)������(sh��)���ضȿ��Ƶ�ԭ����Ҫ�ǣ����S�ض�׃����׃�������텢��(sh��)��ͨ�^�ضȂ������D(zhu��n)׃�����̖(h��o)�����oӋ(j��)��C(j��)���c�o���ض����p��õ�ƫ���(j��ng)�^��������ݔ���o���ƌ�(du��)���_(d��)���ص�Ŀ�ġ� �댧(d��o)�w����Ƭ�����ð댧(d��o)�w���ϵ�PeltierЧ��(y��ng)����(d��ng)ֱ���ͨ�^�ɷN��ͬ�댧(d��o)�w���ϴ�(li��n)�ɵ��ż�r(sh��),���ż�ăɶ˼��ɷքe���՟����ͷų�����,���Ԍ�(sh��)�F(xi��n)�����Ŀ�ġ������ٶ��cͨ�^�������С�����ȡ� ���O(sh��)Ӌ(j��)ᘌ�(du��)�ð댧(d��o)�w��(du��)ˮ�������ģ���O(sh��)Ӌ(j��)������(y��ng)ģ��PI��������(du��)ˮ���M(j��n)��Ӌ(j��)��C(j��)��ؿ��ơ�
����
1 �n���O(sh��)Ӌ(j��)���� 1.1 �n���O(sh��)Ӌ(j��)�}Ŀ 1.2 ��Ҫ�x���O(sh��)�� 2 Ӳ���O(sh��)Ӌ(j��) 2.1 ��Ƭ�C(j��)���� 2.2 ���нӿڲ��� 2.3�(q��)��(d��ng)�·���� 3 ܛ���O(sh��)Ӌ(j��) 3.1 ���̈D�O(sh��)Ӌ(j��) 3.1.1 �ضȿ������������̈D 3.2 �����㷨�O(sh��)Ӌ(j��) 3.2.1 ���ƌ�(du��)��ģ�� 3.2.2 PI�������O(sh��)Ӌ(j��) 3.2.3 ���������O(sh��)Ӌ(j��) 4 ϵ�y(t��ng)�{(di��o)ԇ 4.1 ��Ƭ�C(j��)������� 4.2 STC12C5A08S2��Ƭ�C(j��)ϵ�y(t��ng)�·�{(di��o)ԇ 4.3 �(q��)��(d��ng)�·�{(di��o)ԇ 4.4 ϵ�y(t��ng)�{(di��o)ԇ 5 ���Y(ji��)�c���M(j��n)չ�� 6 �x�o ���� �ض�����һ�(xi��ng)�Ṥ����(sh��),�ڹ��I(y��)�F(xi��n)��(ch��ng)���^�̿����о������P(gu��n)��Ҫ�����á��댧(d��o)�w��������(du��)�ڂ��y(t��ng)���䷽ʽ�������w�eС�������p���o���䄩������Ⱦ�h(hu��n)���������ٶȿ죬ʹ�É����L(zh��ng)�������ڿ��ơ����Ľ�B��ʹ��DS18B20����ضȂ�������PWM�댧(d��o)�w�������ϵ�y(t��ng)�� 1 �n���O(sh��)Ӌ(j��)����1.1 �n���O(sh��)Ӌ(j��)�}Ŀ�O(sh��)Ӌ(j��)�댧(d��o)�w����Ƭ�ľ����(q��)��(d��ng)�·�͟���Ԫ���Ĝy(c��)���·�����O(sh��)Ӌ(j��)PI���������{(di��o)��(ji��)����늉�����(sh��)�F(xi��n)�ضȿ��ƣ����Ʒ���15~25�ȣ����ƾ��ȡ�0.5�ȣ�ͨ�^�I�P�M(j��n)�Мض��O(sh��)�ã���(sh��)�H�ضȿ��Ԍ�(sh��)�r(sh��)�@ʾ�� *����Ҫ��ͨ�^RS232��RS485�ӿ��cPC�C(j��)ͨ�ţ���PC�C(j��)���M(j��n)�Ѕ���(sh��)�@ʾ���O(sh��)�á�
1.2 ��Ҫ�x���O(sh��)���댧(d��o)�w����Ƭ���Bˮ�䣩 1�_(t��i) ʾ���� 1�_(t��i) ֱ����(w��n)���Դ 1�_(t��i) ��(sh��)���f�ñ� 1�K PC�C(j��) 1�_(t��i)
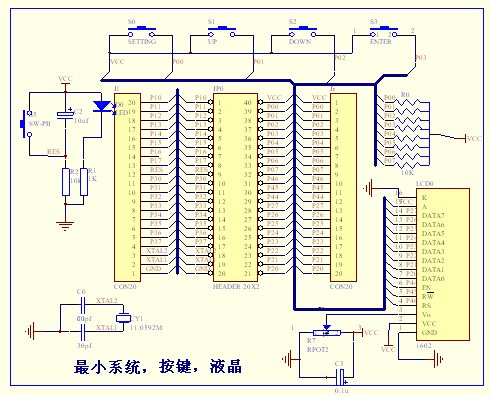
2 Ӳ���O(sh��)Ӌ(j��)����(g��)ϵ�y(t��ng)�Ԇ�Ƭ�C(j��)STC12C5A08S2����IJ�������08S2��Сϵ�y(t��ng)��������˰��I���@ʾ���cPC�C(j��)��ͨ�Žӿڣ��Լ�������PC817��MOS��IRF9540��(g��u)�ɵ��(q��)��(d��ng)�·�� 2.1 ��Ƭ�C(j��)���� ���O(sh��)Ӌ(j��)�x��Ć�Ƭ�C(j��)оƬ��STC12C5A08S2����ԭ��D��2-1��ʾ��ԓоƬ��P0.0-P0.3�����I�P��(sh��)����ݔ�룬������������谴�Iδ���r(sh��)ʼ�K̎�ڸ��ƽ��B(t��i)���x���Iֵǰ�ȽoP0���xֵ��0�� P1.0����DS18B20�Ĕ�(sh��)��(j��)ݔ��˿ڣ� P2.0-P2.7��LCD1602�Ĕ�(sh��)��(j��)ݔ���˿ڣ� P4.4-P4.6��LCD1602�Ŀ�����̖(h��o)�� P1.3�������ϵĿ�����̖(h��o)�� P3.0��P3.1��STC12C5A08S2�Ĵ��ڣ���(sh��)�F(xi��n)��늏�(f��)λ�������d�� �D 2-1 STC12C5A08S2��Сϵ�y(t��ng)ԭ��D 
2.2 ���нӿڲ���MAX232ͨ�^��(n��i)��늉�������늉������·����TTL�ƽ�cRS232�ƽ���Q����(sh��)�F(xi��n)��Ƭ�C(j��)�cPC�C(j��)�Ĵ���ͨ�š� �D 2-2 MAX232�����нӿ�ԭ��D 2.3�(q��)��(d��ng)�·����JPWM��P1.3�ڵ�PWM��̖(h��o)ݔ�룬�������PC817���|�l(f��)��(d��o)ͨ��̖(h��o)���Ķ��a(ch��n)��MOS��IRP9540��(d��o)ͨ���|�l(f��)��̖(h��o)����(sh��)�F(xi��n)��(du��)�Ҷ�ؓ(f��)�d�Ŀ��ơ���D2-3��ʾ�����·��߀�����˓܄�(d��ng)�_�P(gu��n)�Ɍ�(du��)ϵ�y(t��ng)�M(j��n)���_�P(gu��n)���ơ� �D 2-3 �(q��)��(d��ng)����ԭ��D 3 ܛ���O(sh��)Ӌ(j��)3.1 ���̈D�O(sh��)Ӌ(j��)3.1.1 �ضȿ������������̈D�ضȿ������������̈D�O(sh��)Ӌ(j��)��D 3-1��ʾ�� STC12C5A08S2�е���������Ҫ����ׂ�(g��)����: - �{(di��o)���Ӻ���(sh��)��(du��)ϵ�y(t��ng)��ʼ��,���а�����(du��)�����Ķ��r(sh��)��T0,T1,I/O��,PWM�ڣ�P1.3�������ڵij�ʼ�����Լ���(du��)�ⲿ����DS18B20��LCD1602�ij�ʼ�����ӕr(sh��)2S��@ʾ�gӭ��Ļ��������(g��)ϵ�y(t��ng)늉���(w��n)�����xȡ�_�C(j��)�r(sh��)�Ĝضȣ�
- �{(di��o)���Ӻ���(sh��)�xȡ��(d��ng)ǰ�ض�ֵ
- �{(di��o)���Ӻ���(sh��)�Ѯ�(d��ng)ǰ�xȡ�Ĝض��Լ��O(sh��)��ֵͨ�^��������PC�C(j��)�@ʾ��
- �{(di��o)���Ӻ���(sh��)�Д�PC�C(j��)�Ƿ����µĔ�(sh��)��(j��)���͵���Ƭ�C(j��)��
- �{(di��o)���Ӻ���(sh��)�����O(sh��)��ֵ�c��(d��ng)ǰֵ����^����(du��)ݔ��PWM�M(j��n)�п��ƣ�
- �{(di��o)���Ӻ���(sh��)ˢ�®�(d��ng)ǰ�(y��)�棻
- �{(di��o)���Ӻ���(sh��)�M(j��n)�а��I�Д࣬����(j��)���Iֵ�{(di��o)�ò�ͬ���Ӻ���(sh��)�M(j��n)�з��(y��)�����O(sh��)�ã�

�D 3-1�ضȿ������������̈D
3.2 �����㷨�O(sh��)Ӌ(j��)3.2.1 ���ƌ�(du��)��ģ������Ƭ��ˮ��ģ�Ϳɽ��Ƶ��J(r��n)���һ�A�T�ԭh(hu��n)��(ji��)���Ķ��y(c��)��ϵ�y(t��ng)�A�S푑�(y��ng)��ģ�M��ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�ͣ�G(s)=1/��T*s+1��������T�����A�S푑�(y��ng)���{(di��o)��(ji��)�r(sh��)�gTs���ķ�֮һ���o���I=0.5A�r(sh��)�A�S푑�(y��ng)��(sh��)��(j��)ӛ����£�����t=0�r(sh��)���ضȼs��27�棻t=100�r(sh��)���ضȼs��24�档ȡ�Kֵ11K����98%��Ts�s��54min=3240s���tG(s)=1/��810*s+1���� 1.�ɴ˿���������ϵ�y(t��ng)�Ǵ�T��ϵ�y(t��ng)��������Ҫһ�Εr(sh��)�g֮��ضȲ��_ʼ�½��� 2.��ֹͣ����ض�߀��(hu��)��С���ȵ��½������O(sh��)���ض�Խ�ͣ��½��ķ���ԽС�� 3.�����c���ğύ�Q���ض�Խ�͕r(sh��)��ˮ�����Ȼ�����ٶ�Խ�졣 
�D 3-2 ��(du��)���A�S푑�(y��ng)�M������
3.2.2 PI�������O(sh��)Ӌ(j��)PI�{(di��o)��(ji��)�����ַ��̞飺y(t)=Kp[e(t)+1/Ti*��e(t)dt]���������ЃɷN�㷨��λ���ͺ������͡�λ�����㷨�r(sh��)��Ӌ(j��)��ÿ�Ό�(sh��)�Hֵ�c�O(sh��)��ֵ��ƫ���e0���ϴε�ƫ���e1���t������u=kp*e0+ki*��e0+e1�����������㷨�r(sh��)��u+=e0*ki+(e1-e0)*kp������ϵ�y(t��ng)���x�õ���λ�����㷨�� 3.2.3 ���������O(sh��)Ӌ(j��) ����(j��)����Ƭ�Ĝ������c(di��n)������ʹ����Ƭ��Ѹ���_(d��)���O(sh��)���Ĝضȣ���(y��ng)ԓ���x�O(sh��)���ض��^�h(yu��n)�r(sh��)�oؓ(f��)�d��������ʣ��֞��˷�ֹ����Ƭ�Ĵ�T�Ե�����ʹϵ�y(t��ng)�a(ch��n)����(y��n)�صij��{(di��o)����Ҫ��ǰ��һ���ķ�����(n��i)�M(j��n)��PI�������_(d��)�����Ч����������A�Σ���Ҫ�A(y��)���Д�ϵ�y(t��ng)��ֹͣ�����c(di��n)������Ƭ�ĜضȔU(ku��)ɢ������(g��)ˮ�䣬�˕r(sh��)ֹͣ���䡣 ���O(sh��)���ضȴ��ڮ�(d��ng)ǰ�ضȕr(sh��)��ϵ�y(t��ng)Ҳ��ֹͣ���䣬�Ȝض����������� �F(xi��n)�O(sh��)���_ʼ�M(j��n)��PI���ƵĜض����ޞ��O(sh��)��ֵT+1�棬��ֹͣ����Ĝضȣ�����(j��)��Ό�(sh��)�(y��n)�����Ĕ�(sh��)��(j��)��(k��)���£� 4 ϵ�y(t��ng)�{(di��o)ԇ4.1 ��Ƭ�C(j��)������� ����PROTEUS�Л]���҂��x�õ�STC12C5A08S2��̖(h��o)�Ć�Ƭ�C(j��)�����ʹ��AT89S2�Ć�Ƭ�C(j��)���档�����·���D��ʾ������r(sh��)����ʼ���r(sh��)��(d��ng)ǰ�ض��@ʾ��85�����⣬һ�й���������
�D 4-1 ϵ�y(t��ng)�����·�����·�D
4.2 STC12C5A08S2��Ƭ�C(j��)ϵ�y(t��ng)�·�{(di��o)ԇ STC12C5A08S2��Сϵ�y(t��ng)��������͏�(f��)λ�·�����I�·��LCD�@ʾ���Լ�ͨ�����d�ӿڡ� ������ǰ�]��ʹ���^�@��(g��)��̖(h��o)�Ć�Ƭ�C(j��)��Ҳ�]�����^�������d���������ȰѴ��ڽӿ�оƬMAX232�����ⲿ��ݺ͆�Ƭ�C(j��)�ľ����·����������ϣ�ͨ�^�����c��Ƭ�C(j��)�B���{(di��o)ԇ���d���ܣ�����һ�_ʼ�Դ�͵�֮�g�]�н���ݣ����ϵ�y(t��ng)���Ǻܷ�(w��n)�����Еr(sh��)�������d���Еr(sh��)�����ԣ��������֮��ϵ�y(t��ng)���^��(w��n)���ˡ� ����(j��)�����������·�D��ԭ��D�Լ�PCB������������֮�����f�ñ�y(c��)ԇ���c(di��n)���B�����ԣ���������늣��Դָʾ��ƫ������10K���������Q��1K��֮��ָʾ������������ ����STC12C5A08S2��Ƭ�C(j��)�\(y��n)���ٶȱ�89S52�죬��˳������ӕr(sh��)�Ӻ���(sh��)һ�ɳ���12���Ĺ��_ʹ���m��(y��ng)��(sh��)�H���·�壬���¾��g�����d����Һ���]���@ʾ���{(di��o)��(ji��)Һ���@ʾƫ����̖(h��o)�˵�늉���ʹ��ӽ��أ�Һ���@ʾ����������DS18B20,�ض��@ʾ�������ð��I�M(j��n)�з��(y��)���O(sh��)�ã����I������������(j��)�ˣ���Ƭ�C(j��)ϵ�y(t��ng)�弰������ȫ���������� 4.3 �(q��)��(d��ng)�·�{(di��o)ԇ�(q��)��(d��ng)�·�����ú��M(j��n)�Мy(c��)ԇ�������ñ�y(c��)�������c(di��n)�B�������������քe��PWMݔ��˽ӵغͽ�VCC����ʾ�����^��ؓ(f��)�dݔ��늉���ݔ��늉���(du��)��(y��ng)����͞�12������������������PWM��̖(h��o)��ݔ��׃?y��u)��㣬�������?/font> ��ʾ�����^��MOS��G�O늉����l(f��)�F(xi��n)����X�����������փAб���½������Qֱ������ԭ��?y��n)�MOS�ܵ�S�O�c�Դ֮�g�����̫��ʹͨ�^MOS�ܵ����̫С��MOS�ܵ��������ʹ����һ����늕r(sh��)�g��(n��i)늉������_(d��)����(d��o)ͨ�����ݔ������㡣������{(di��o)С����X��픲���u׃ƽ������^�m(x��)�{(di��o)С��ݔ�������늉��_ʼ���߲����㡣�˕r(sh��)�^�m(x��)�{(di��o)��(ji��)����ћ]�����x���ڳ����а�PWMݔ���IJ����l�ʽ��ͣ��������14HZ���˕r(sh��)G�O�����ў鷽�����^�m(x��)�pС��裬ֱ��G�Oݔ�������늉�ǡ�Þ��㣬ʹ����ͨ�^�����l�ʵ���̖(h��o)�����������ԓ��裬ʹ��늉������S��һ��������(n��i)����(d��ng)�� �y(c��)���B��ؓ(f��)�d��D�O��D�O���Ξ��cݔ���PWM����ķ������(q��)��(d��ng)�·���������� 4.4 ϵ�y(t��ng)�{(di��o)ԇ����(g��)���ֵ��{(di��o)ԇ����Ժ�(du��)����(g��)ϵ�y(t��ng)�M(j��n)���{(di��o)ԇ�����Ҝؼs27.5���_ʼ���O(sh��)��ˮ��Ĝضȷքe��26�棬23�棬20�档 ���wӛ䛵Ĕ�(sh��)��(j��)������ʾ�� �� 6-5-1
�����㷨���{(di��o)����������1%���£��ض��½��ٶ��^�죬�^��(w��n)���� 5 ���Y(ji��)�c���M(j��n)չ�������O(sh��)Ӌ(j��)�У�������˰����Y���ռ���ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����棬�������·�D�cPCB����L�Ƹ��g���Ӽ��{(di��o)ԇ��ȫ�^�̣�����(g��)ϵ�y(t��ng)��ɜy(c��)ԇ�����ܷ�(w��n)���������_(d��)�����A(y��)�ڵ�Ŀ��(bi��o)�� ˮ��ض���29~10�z�϶ȷ�����(n��i)�ɿأ��O(sh��)��ֵ�����ڮ�(d��ng)ǰ�Ҝأ���LCDҺ���ض��@ʾ��(w��n)�����c֮ǰُ(g��u)�I�Ĝض�Ӌ(j��)�д�s�㶨1��Ĝز���͵�PC�C(j��)�Ĕ�(sh��)��(j��)�@ʾ���������ԏ�PC�C(j��)���Ք�(sh��)��(j��)��(du��)����(g��)����(sh��)�M(j��n)���O(sh��)�á� �ضȿ����㷨���O(sh��)Ӌ(j��)����ԭģ���ֶο��ƵĻ��A(ch��)�ϣ�������PI���ƣ��mȻ������ڕr(sh��)�g�P(gu��n)ϵ������(sh��)��ֻʹ����P�����ǿ����C����������PI���Ƶ�ģ���㷨�Ȇμ���ģ���ֶο���ȡ���˸��õ�Ч���� �ڱ����O(sh��)Ӌ(j��)�У�Ҳ���������Ը��M(j��n)�ĵط�������������в��ֳ�����ǎ��؏�(f��)ʹ�õģ����ڸ��N��r�£�ֻʹ����switch����(sh��)����rӑՓ���]�п��Y(ji��)���ض��ĺ���(sh��)��(du��)���е���r�M(j��n)��̎�����@��(d��o)���˳����^�L(zh��ng)����(y��ng)ԓ߀�п��ԉ��s�Ŀ��g��߀�Ќ�(du��)�څ���(sh��)���{(di��o)����ֻʹ����P���]���õ�I�����Ҍ�(du��)��ֹͣ���Ƶ�λ�ã�Ҳ߀��(y��ng)ԓ������ϡ��@������Ҫ�����{(di��o)���ģ�����DS18B20�z�y(c��)�ض�ֻ�ܾ��_��0.0625�棬��Ҫ���M(j��n)һ���������Nָ��(bi��o)��Ԓ����ÓQһ��(g��)���ȸ��ߵĜضșz�y(c��)�ֶΡ� 6 �x�o�����O(sh��)Ӌ(j��)�܉���ɵõ����S�����������ȸ��x�w�W(xu��)܊�ώ�����ƽ�ώ��Լ������ώ���Ϥ��ָ��(d��o)�����҂��ṩ���O(sh��)Ӌ(j��)��˼·�����҂�ָ�����O(sh��)Ӌ(j��)�ĸ��N����ָ������һ�δΞ��҂���Q���{(di��o)ԇ�^���г��F(xi��n)�ĸ��N���}����������������ָ��(d��o)���ҵ��O(sh��)Ӌ(j��)�ŵ��������ɡ� ���xһͬ�M(j��n)���O(sh��)Ӌ(j��)��ͬ�W(xu��)����������?c��)��Ҍ?du��)������һ�IĪչ�ؕr(sh��)��o��ָ���˿��ܵ��e(cu��)�`�����{(di��o)ԇ�^���нo���Ҹ��N��Ҋ�����Ҝy(c��)����(sh��)��(j��)�r(sh��)�o���Ҹ��N�������]�������Ď������ҵ��O(sh��)Ӌ(j��)���ܵ������ơ� ���xһֱ�̌�(d��o)�ҵ����n�ώ��������n�ώ���ՁՁ�̌�(d��o)��ʹ���҂����ԌW(xu��)�����ã���ɱ����O(sh��)Ӌ(j��)һ���ǻ�������(sh��)����Փ�n���A(ch��)�ġ� �����x�ڱ����O(sh��)Ӌ(j��)�����Ў����^�ҵ��ώ�ͬ�W(xu��)����
�� �

��Ҫ�·PCB��
STC89C5A08S2��Сϵ�y(t��ng)�(q��)��(d��ng)�· STC12C5A08S2��Ƭ�C(j��)Դ��������:
- #include<STC_NEW_8051.h>
- #include<DS18B20.h>
- #include<LCD1602.h>
- #define keys P0
- sbit PWM=P1^3;
- uchar settemp[12]={'S','e','t',':',' ','2','6','.','0',' ',0xdf,'C'};
- ucharnowtemp[12]={'N','o','w',':','0','2','6','.','5','0',0xdf,'C'};
- uchar welcome[16]="Welcome! O(^_^)O";
- uchar number[13]="0800320101 CC";
- uchar e[4]={0,0,0,0};
- uchar us[4]={0,0,0,0};
- uchar shou[4];
- uchar TL,TH,page,num=0,whi=0;
- int fub=100,ki=0,kp=50;
- uchar fus[8]="Fu: 100 ",kps[8]="Kp: 050 ",kis[8]="Ki: 000 ";
- int TN,TD,Ntemp100,Stemp100=2600,e1=0,e0=0,u=0;
- bit busy;
-
- /***************�@ʾ�O(sh��)��**********************/
- void page0()//��ʼ���gӭ�(y��)
- {
- int i;
- _1602_init();
- _1602_writecode(0x00+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<16;i++) //�@ʾ�gӭ
- _1602_writedata(welcome[i]);
- _1602_writecode(0x40+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<13;i++) //�@ʾ�W(xu��)̖(h��o)����
- _1602_writedata(number[i]);
- for(i=0;i<40;i++)
- delay(5000);
- }
-
- void page1() //�ض��@ʾ�(y��)
- {
- int i;
- _1602_writecode(0x00+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<12;i++) //�@ʾ�O(sh��)���ض�
- _1602_writedata(settemp[i]);
- _1602_writecode(0x40+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<12;i++) //�@ʾ�F(xi��n)�ڜض�
- if(Stemp100>2300) stop=Stemp100*3/500; //�P(gu��n)��ֵ��ģ������
- else if(1900<Stemp100<=2300) stop=7;
- else stop=0;
- e1=e0;
- e0=Ntemp100-Stemp100;
- e[3]=e0%10;
- e[2]=(e0/10)%10;
- e[1]=(e0/100)%10;
- e[0]=(e0/1000);
- _1602_writecode(0x0c+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<4;i++) //�@ʾ�`��
- _1602_writedata(e[i]+0x30);
- if(stop<e0<fub)//PI�\(y��n)��
- {
- u=e0*kp/10;
- u+=(e1+e0)*ki/10;
- if(u>255) u=255;
- if(u<0) u=0;
- }
- if(e0>=fub) u=0xff; //ȫ�_
- if(e0<=stop) u=0x00;//�P(gu��n)��
- us[3]=u%10;
- us[2]=(u/10)%10;
- us[1]=(u/100)%10;
- us[0]=(u/1000);
- _1602_writecode(0x4c+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<4;i++) //�@ʾ������
- _1602_writedata(us[i]+0x30);
- CCAP0H=u;
- }
- /***********��(sh��)��(j��)̎��������********************/
- //��׃ռ�ձȣ�CCAP0H=0xff-0xff*ռ�ձ�/100=0xff-51/20*ռ�ձ� ;0x00,ݔ��100%��ֹͣ���䣻
- /************���I�Д�̎��********************/
- uchar keyin(void) //�ΰ��Iֵ�Д࣬1--setting,2--up,4--down,8--enter
- {
- uchar key,come=0;
- keys=0x00;
- delay(2);
- key=keys&0x0f;
- if(key!=0) //����
- s=settemp[6]-0x30;
- x=seting2(0x06,s);
- settemp[6]=x+0x30;
- Stemp100+=x*100;
-
- s=settemp[8]-0x30;
- x=seting2(0x08,s);
- settemp[8]=x+0x30;
- Stemp100+=x*10;
- }
- void setingc(uchar n) //���I�ą���(sh��)�O(sh��)��
- {
- uchar s,i;
- switch(n)
- {
- case 0:{ fub=0; //ģ����
- for(i=4;i<7;i++)
- {
- s=fus[i]-0x30;
- s=seting2(i,s);
- fub=fub*10+s;
- fus[i]=s+0x30;
- }
- break;
- }
- case 1:{ kp=0;
- for(i=4;i<7;i++)
- {
- s=kps[i]-0x30;
- s=seting2(i+0x40,s);
- kp=kp*10+s;
- kps[i]=s+0x30;
- }
- break;
- }
- case 2:{ ki=0;
- for(i=4;i<7;i++)
- {
- s=kis[i]-0x30;
- s=seting2(i+0x48,s);
- ki=ki*10+s;
- kis[i]=s+0x30;
- }
- break;
- {
- kps[i+3]=shou[i];
- s=shou[i]-0x30;
- kp=kp*10+s;
- }
- shou[0]=0;
- break;
- }
- case 'I': { //׃��ki
- ki=0;
- for(i=1;i<4;i++)
- {
- kis[i+3]=shou[i];
- s=shou[i]-0x30;
- ki=ki*10+s;
- }
- shou[0]=0;
- break;
- }
- }
- }
- /***********���I�Д�̎��**********************/
- /*************PWM��ʼ��********************/
- void PWM_init() //PWM��ʼ��
- {
- TMOD=0x22;//T0�����ڷ�ʽ2��8λ���b
- TH0=0x00;
- TR0=1; //�_ʼӋ(j��)��(sh��)
- CCON=0x00;//�P(gu��n)PCA
- CH=0; CL=0; //Ӌ(j��)��(sh��)�Ĵ�������
- CMOD=0x04;//ʼ�K������f=���r(sh��)��0����l�ʣ�PWMģʽ��ֹ�Д�
- CCAPM0=0X42; //PCA0������PWMģʽ
- PCA_PWM0=0x00; //���˞��0x02,�tݔ�����0����Ҫ�{(di��o)��ռ�ձȣ����xֵ��0��
- CCAP0H=0x00;//ݔ��ռ�ձ�100%
- CR=1; //�_ʼӋ(j��)��(sh��)
- }
-
- /**************PWM��ʼ��*******************/
- /*************���ڳ�ʼ��********************/
- void Uart_init(void)
- {
- IE=0x90;
- void main()
- {
- uchar key,i;
- P4SW=0x70;//P4��IO��
- page=1; //Ĭ�J(r��n)�(y��)���һ�(y��)
- PWM_init();
- _1602_init();
- Uart_init(); //���ڳ�ʼ��
- page0(); //�@ʾ��ʼ���gӭ�(y��)
- _1602_writecode(0x01);//����
- delay(50);//���������o�ӕr(sh��)�t��һ��(g��)�ַ��@ʾ����
- sent_pc(welcome,16);
- sent_pc_byte('\r'); //13,10��������܇
- sent_pc_byte('\n');
- sent_pc(settemp,10);
- sent_pc(nowtemp,10);
- while(1)
- {
- k1: gets(); //�xȡ��(d��ng)ǰ�ض�
- sent_pc_byte('\r'); //13,10��������܇
- sent_pc_byte('\n');
- sent_pc(settemp,10); //�oPC�C(j��)���O(sh��)���ض��Լ���(d��ng)ǰ�ض�
- sent_pc(nowtemp,10);
- control(); //�M(j��n)���
- if(page==1)
- {
- page1(); //�@ʾ��(d��ng)ǰ�ض��(y��)
- key=keyin();//�Д��Iֵ
- switch(key)
- {
- case 1: {CCAP0H=0x00;setingt(); goto k1;} //�M(j��n)���O(sh��)��
- case 2:
- case 4: { _1602_writecode(0x01);
- delay(50);//����
- page=2; } //���·��(y��)
- }
- }
- if(page==2)
- {
- page2(); //�@ʾ����(sh��)�O(sh��)���(y��)
- key=keyin();//�Д��Iֵ
- switch(key)
- _1602_writedata(nowtemp[i]);
- }
- void page2()//����(sh��)�@ʾ�(y��)
- {
- int i;
- _1602_writecode(0x00+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<8;i++) //�@ʾFuzzy
- _1602_writedata(fus[i]);
- _1602_writecode(0x40+0x80);//�O(sh��)���@ʾ��ַ
- for(i=0;i<8;i++) //�@ʾkp
- _1602_writedata(kps[i]);
- for(i=0;i<8;i++) //�@ʾki
- _1602_writedata(kis[i]);
- _1602_writecode(0x0c+0x80);//�O(sh��)���@ʾ��ַ
- _1602_writedata(whi+0x30);
- _1602_writedata(' ');
- _1602_writedata(' ');
- _1602_writedata(' ');
- }
- /**************�@ʾ�O(sh��)��*********************/
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
������Word��ʽ�ęn51�����d��ַ��
 �댧(d��o)�w����Ƭ�ضȿ���.doc
(228.5 KB, ���d��(sh��): 98)
�댧(d��o)�w����Ƭ�ضȿ���.doc
(228.5 KB, ���d��(sh��): 98)
2018-4-17 15:56 �ς�
�c(di��n)���ļ������d����
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664