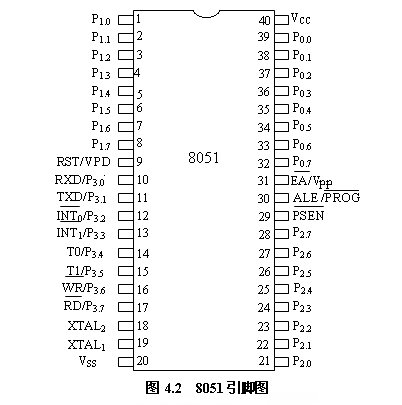
��2���r(sh��)��·���_ XTAL1 �� XTAL2
XTAL1��18 �_�������ⲿ���w���{(di��o)��ݵ�һ�ˣ��� 8051 Ƭ��(n��i)������ʎ�·����� ������ݔ���ˣ���ʎ�·���l�ʾ��Ǿ��w�����l�ʡ���������ⲿ�r(sh��)��·�r(sh��)��ԓ���_ ݔ���ⲿ�r(sh��)��}�_��
XTAL2��19 �_�������ⲿ���w���{(di��o)��ݵ���һ�ˣ���Ƭ��(n��i)������ʎ�·����Ŵ� ����ݔ��ˡ��ڲ����ⲿ�r(sh��)犕r(sh��)��ԓ���_��횽ӵء�

 ��3��������̖(h��o)���_ RST��ALE�� PSEN�� EA
��3��������̖(h��o)���_ RST��ALE�� PSEN�� EA
RST/VPD��9 �_����RST �Ǐ�(f��)λ��̖(h��o)ݔ��ˣ����ƽ��Ч����(d��ng)��ݔ��˱��փɂ�(g��)�C(j��)�� ���ڣ�24 ��(g��)�r(sh��)���ʎ���ڣ��ĸ��ƽ�r(sh��)���Ϳ�����ɏ�(f��)λ������RST ���_�ĵڶ���(g��)�� �ܕr(sh��) VPD���������Դ��ݔ��ˡ���(d��ng)���Դ VCC �l(f��)�����ϣ����͵����ƽҎ(gu��)��ֵ�r(sh��)����
+5V �Դ�Ԅ�(d��ng)���� RST �ˣ��� RAM �ṩ�����Դ���Ա��C�惦(ch��)�� RAM �е���Ϣ���G ʧ���Ķ�ʹ��(f��)λ�����^�m(x��)�����\(y��n)�С�
 ALE/ PROG��ADDRESS LATCH ENABLE/PROGRAMMING��30 �_������ַ�i�� ���S��̖(h��o)�ˡ���(d��ng) 8051 �������������ALE ���_��������ݔ�����}�_��̖(h��o)�����l�ʞ� ��ʎ���l�� fosc �� 1/6��CPU �L��(w��n)Ƭ��惦(ch��)���r(sh��)��ALE ݔ����̖(h��o)�����i��� 8λ��ַ��
ALE/ PROG��ADDRESS LATCH ENABLE/PROGRAMMING��30 �_������ַ�i�� ���S��̖(h��o)�ˡ���(d��ng) 8051 �������������ALE ���_��������ݔ�����}�_��̖(h��o)�����l�ʞ� ��ʎ���l�� fosc �� 1/6��CPU �L��(w��n)Ƭ��惦(ch��)���r(sh��)��ALE ݔ����̖(h��o)�����i��� 8λ��ַ��
������̖(h��o)��
ƽ�r(sh��)���L��(w��n)Ƭ��惦(ch��)���r(sh��)��ALE ��Ҳ����ʎ�l�ʵ� 1/6 �̶�ݔ�����}�_����� ALE
��̖(h��o)����������(du��)��ݔ���r(sh��)犻r(sh��)��̖(h��o)��
ALE �˵�ؓ(f��)�d�(q��)��(d��ng)������ 8 ��(g��) LS �� TTL������������ TTL��ؓ(f��)�d��
 PSEN
PSEN(PROGRAM STORE ENABLE ��29 �_)������惦(ch��)���Sݔ����̖(h��o)�ˡ����L��(w��n)
Ƭ�����惦(ch��)���r(sh��)���˶˶��r(sh��)ݔ��ؓ(f��)�}�_�����xƬ��惦(ch��)�����xͨ��̖(h��o)�������_��


EPROM ��
OE�ˡ�
PSEN����Ч�������S�x�� EPROM/ROM �е�ָ��a��
 PSEN
PSEN��ͬ�ӿ��(q��)��(d��ng) 8 ��(g��) LS �� TTL ؓ(f��)�d��
 EA
EA/VPP��ENABLE ADDRESS/VOLTAGE PULSE OF PROGRAMMING��31 �_����
�ⲿ����惦(ch��)����ַ���Sݔ���/�̻�����늉�ݔ��ˡ�

��(d��ng)
EA���_�Ӹ��ƽ�r(sh��)��CPU ֻ�L��(w��n)Ƭ��(n��i) EPROM/ROM ����(zh��)�Ѓ�(n��i)������惦(ch��)���� ��ָ�����(d��ng) PC������Ӌ(j��)��(sh��)������ֵ���^(gu��) 0FFFH�����Ԅ�(d��ng)�D(zhu��n)ȥ��(zh��)��Ƭ�����惦(ch��)����(n��i)





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






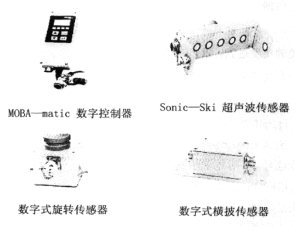


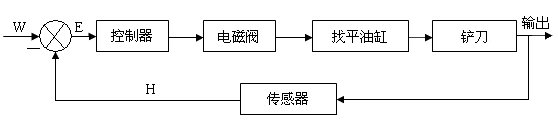
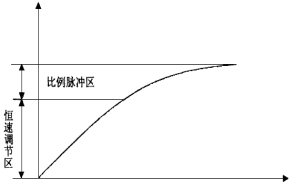
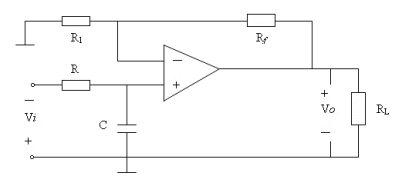
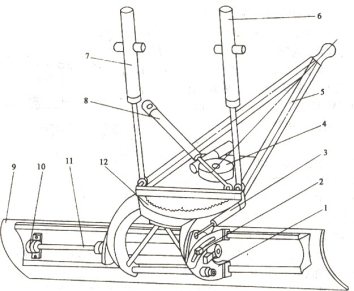 �����b�ã������b�ü��P������λ�ڙC(j��)����ǰ���֮�g���Á�(l��i)��Ʉ��x���D(zhu��n)������ ��ƽ���ȹ�����[3]�D2.2��ƽ�ؙC(j��)�P�������b�ýY(ji��)��(g��u)�D��
�����b�ã������b�ü��P������λ�ڙC(j��)����ǰ���֮�g���Á�(l��i)��Ʉ��x���D(zhu��n)������ ��ƽ���ȹ�����[3]�D2.2��ƽ�ؙC(j��)�P�������b�ýY(ji��)��(g��u)�D��

 943-F4Y-2D-1D0-180E ������������
943-F4Y-2D-1D0-180E ������������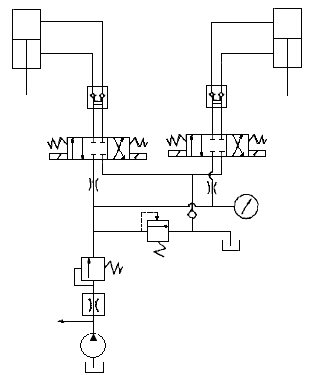




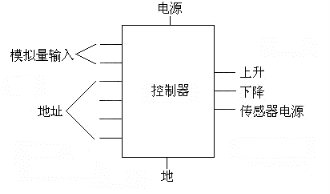
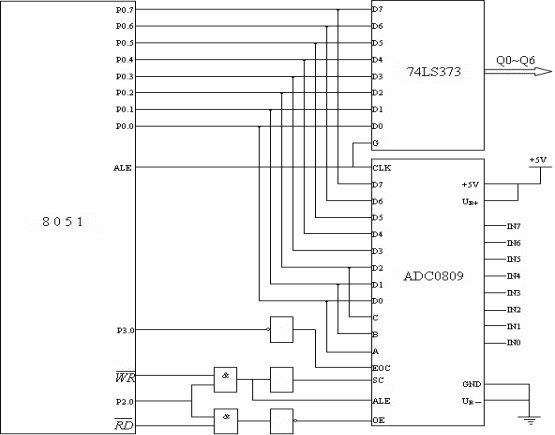 �D 4.11 �� ADC0809 �c 8051 �ӿڵ��B�ӷ��������څ���늉� UR+��+5V ���Դ�� UR�C�ӵأ�����ݔ����̖(h��o)��׃��������0~5V����Ƭ�C(j��) 8051 �� P2.0 ��� WR ���_�l(f��)�� ADC0809 �Ć���(d��ng)�D(zhu��n)�Q��̖(h��o)����� RD ���_�l(f��)���xȡ A/D �D(zhu��n)�Q�Y(ji��)������̖(h��o)��P0 �ڵ� P0.0�� P0.1��P0.2 �c ADC0809 �ĵ�ַ�� A��B��C ���B�ӣ���(du��)��(y��ng) 8 ·ݔ��ģ�M��̖(h��o)�ĵ�ַ�� FEX8H~FEXFH��ADC0809 ��EOC ��(j��ng)�������c P3.0 ���_���B�ӣ��t 8051 ����(j��) P3.0 �� �_�Ġ�B(t��i)��(l��i)�Д��D(zhu��n)�Q�Y(ji��)���Ƿ�Y(ji��)�����ӿ��·�� 74LS373 �dz��õ��i�����·����Ҫ �Á�(l��i)�ڿ�����ݔ�·���i���ַ��Ϣ��(sh��)��(j��)��Ϣ������(sh��)�F(xi��n)������̖(h��o)�ľ��_�c�(q��)��(d��ng)��
�D 4.11 �� ADC0809 �c 8051 �ӿڵ��B�ӷ��������څ���늉� UR+��+5V ���Դ�� UR�C�ӵأ�����ݔ����̖(h��o)��׃��������0~5V����Ƭ�C(j��) 8051 �� P2.0 ��� WR ���_�l(f��)�� ADC0809 �Ć���(d��ng)�D(zhu��n)�Q��̖(h��o)����� RD ���_�l(f��)���xȡ A/D �D(zhu��n)�Q�Y(ji��)������̖(h��o)��P0 �ڵ� P0.0�� P0.1��P0.2 �c ADC0809 �ĵ�ַ�� A��B��C ���B�ӣ���(du��)��(y��ng) 8 ·ݔ��ģ�M��̖(h��o)�ĵ�ַ�� FEX8H~FEXFH��ADC0809 ��EOC ��(j��ng)�������c P3.0 ���_���B�ӣ��t 8051 ����(j��) P3.0 �� �_�Ġ�B(t��i)��(l��i)�Д��D(zhu��n)�Q�Y(ji��)���Ƿ�Y(ji��)�����ӿ��·�� 74LS373 �dz��õ��i�����·����Ҫ �Á�(l��i)�ڿ�����ݔ�·���i���ַ��Ϣ��(sh��)��(j��)��Ϣ������(sh��)�F(xi��n)������̖(h��o)�ľ��_�c�(q��)��(d��ng)��
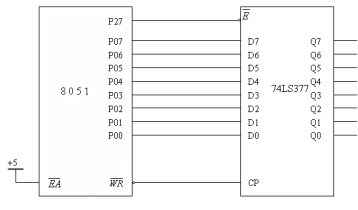

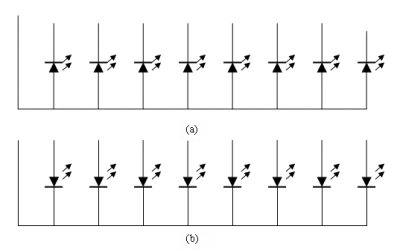



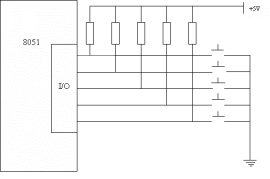
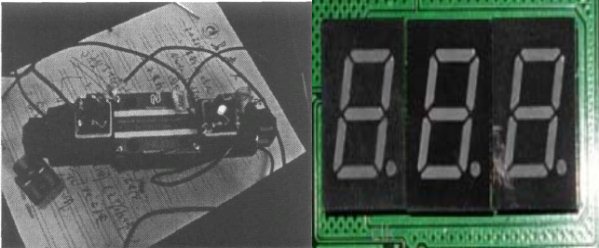
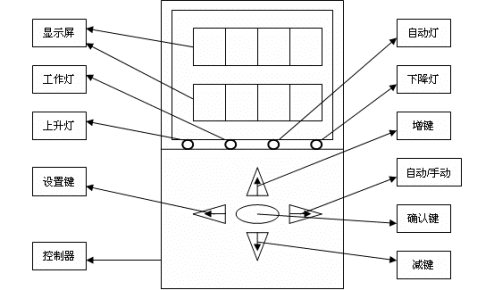 ��ϵ�y(t��ng)Ҫ���Ѓɂ�(g��) 4 λ 7 �� LED �@ʾ�����ڹ����^(gu��)���У��� 4 λ�@ʾ��(sh��)�H�y(c��)���� ��ֵ���� 4 λ�@ʾ�O(sh��)������(zh��n)ֵ���D 4.19�锵(sh��)�ֿ����������^�D������һ�wʽ���^�O(sh��)Ӌ(j��)�� ���nj� LED �@ʾ�������I������B(t��i)ָʾ������һ���@�ӾͿ���ʹ�ò����ˆT�܉� �ܷ�����˽�ϵ�y(t��ng)�Ĺ�����r���S�r(sh��)��(du��)ϵ�y(t��ng)����(sh��)�����{(di��o)����[17][21]
��ϵ�y(t��ng)Ҫ���Ѓɂ�(g��) 4 λ 7 �� LED �@ʾ�����ڹ����^(gu��)���У��� 4 λ�@ʾ��(sh��)�H�y(c��)���� ��ֵ���� 4 λ�@ʾ�O(sh��)������(zh��n)ֵ���D 4.19�锵(sh��)�ֿ����������^�D������һ�wʽ���^�O(sh��)Ӌ(j��)�� ���nj� LED �@ʾ�������I������B(t��i)ָʾ������һ���@�ӾͿ���ʹ�ò����ˆT�܉� �ܷ�����˽�ϵ�y(t��ng)�Ĺ�����r���S�r(sh��)��(du��)ϵ�y(t��ng)����(sh��)�����{(di��o)����[17][21]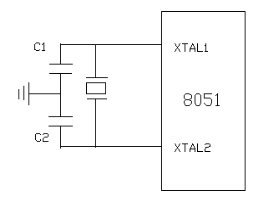
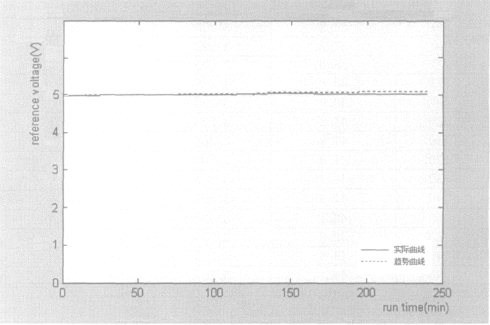
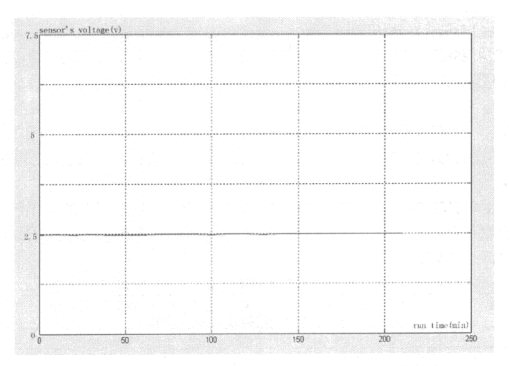
 PC �C(j��)���f(w��n)�ñ���ʾ�����ȡ���������D 6.1 ��ʾ��
PC �C(j��)���f(w��n)�ñ���ʾ�����ȡ���������D 6.1 ��ʾ��
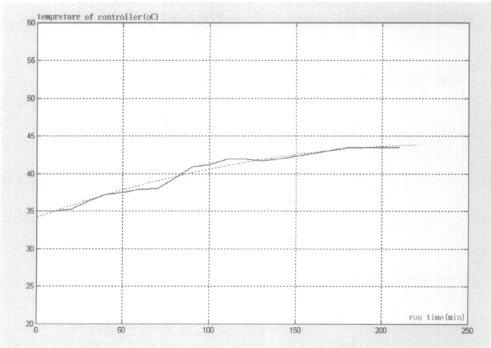
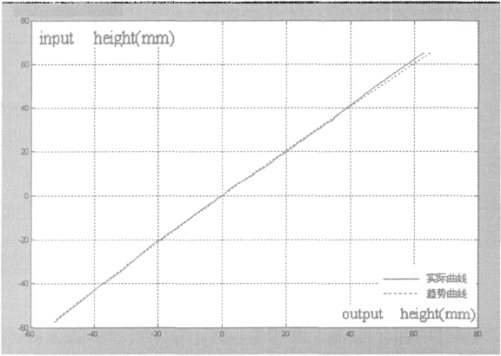

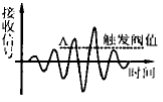
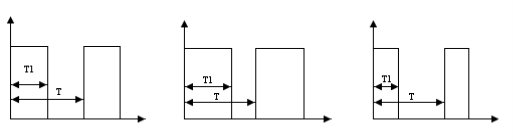
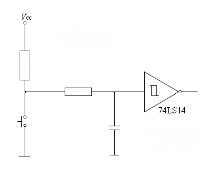
 ����(sh��)�(y��n)��Ŀ����Ҫ�ǜy(c��)ԇ�Ԅ�(d��ng)��ƽ�������ڹ����^(gu��)���У�·���߶Ȱl(f��)��׃���r(sh��)���� ����̖(h��o)(PWM)��ݔ����r����D 6.4 ��ʾ
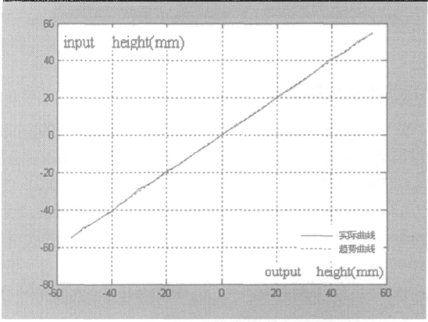
����(sh��)�(y��n)��Ŀ����Ҫ�ǜy(c��)ԇ�Ԅ�(d��ng)��ƽ�������ڹ����^(gu��)���У�·���߶Ȱl(f��)��׃���r(sh��)���� ����̖(h��o)(PWM)��ݔ����r����D 6.4 ��ʾ �D 6.4.3PWM ݔ������ 3�D 6.4.4PWM ݔ������ 4
�D 6.4.3PWM ݔ������ 3�D 6.4.4PWM ݔ������ 4
 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��