|
�D(zhu��n)���]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�Ę�(g��u)���c�ӑB(t��i)��(sh��)�W(xu��)ģ�͵Ľ��� ժҪ������Փ����ֱ��늄әC�{(di��o)��ϵ�y(t��ng)���{(di��o)�ٷ������������_�h(hu��n)���]�h(hu��n)�{(di��o)��ϵ�y(t��ng)ϵ�y(t��ng)�ĸ����M�ɲ��֣��Լ�ϵ�y(t��ng)�ęCе���ԡ����ƌ�(d��o)�������h(hu��n)��(ji��)�Ă��f����(sh��)�Լ���(sh��)�W(xu��)ģ�ͣ�����(j��)�����h(hu��n)��(ji��)���P(gu��n)ϵ���õ�ϵ�y(t��ng)�Ă��f����(sh��)�Լ��ӑB(t��i)ģ�ͣ������η���ϵ�y(t��ng)�ķ�(w��n)���l���� �P(gu��n)�I�~��ֱ��늄әC���{(di��o)��ϵ�y(t��ng)����(sh��)�W(xu��)ģ�ͣ��o���ԣ� �ӑB(t��i)���ԣ� ��(w��n)����
0.����һ��ֱ��늄әC������ͬ�Ĺ���ԭ���͑�(y��ng)�����ԣ��������Ҫ�֞�ֱ����ˢ늄әC��ֱ���oˢ늄әC���������ڲ��������Ŵň���ʹֱ���oˢ늄әC�[Óһ��ֱ��늄әC�Ă��y(t��ng)�O(sh��)Ӌ�ͽY(ji��)��(g��u)�����S�����������Ų��ϡ���Ӽ��g(sh��)���Ԅӿ��Ƽ��g(sh��)�������Ӽ��g(sh��)���M(j��n)�������şoˢֱ��늙C�õ���Ѹ�ٰl(f��)չ[1]�����ڿ˷��˙Cе�Q���b�õĹ���ȱ�c���oˢֱ��늙C���Љ����L���{(di��o)�����܃�(y��u)Խ���w�eС�������p��Ч�ʸߡ��D(zhu��n)�ӑT��С��늴ż����Ժõ��T����(y��u)�c���oˢֱ��늙C�đ�(y��ng)�ú��о��ܵ��ˏV������ҕ���{�似�g(sh��)��(y��u)�����S������ȡ���������N�늄әC[1]���e������늙C�I(l��ng)����С���ʡ����D(zhu��n)�ٵ��{(di��o)���I(l��ng)�oˢֱ��늙Cռ��(j��)����Ҫλ�á���ֱ��늙C���D(zhu��n)�ٹ�ʽ: (0.1) (0.1) U��늘ж��� �գ�����ͨ R��늘���� ��֪��ֱ��늙C�{(di��o)�ٷ��������N�� (1) �{(di��o)��(ji��)늘й��늉�U (2) ��׃늄әC����ͨ�� (3) ��׃늘л�·���R
1.�D(zhu��n)���]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�Ę�(g��u)��1.1 V-Mϵ�y(t��ng)�ĽM�ɼ���Cе�������l��������-늄әC�{(di��o)��ϵ�y(t��ng)��ԭ��D��D1.1��ʾ���D��VT�Ǿ��l��������ͨ�^�{(di��o)��(ji��)�|�l(f��)�b��GT�Ŀ���늉�UC���Ƅ��|�l(f��)�}�_����λ����׃�ɿ�������ƽ��ݔ�����늉�Ud���Ķ����F(xi��n)ֱ��늄әC��ƽ���{(di��o)�١� 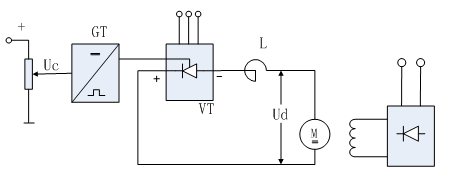
�D1.1 V-Mϵ�y(t��ng)ԭ��D ��(d��ng)��������B�m(x��)�r��V-Mϵ�y(t��ng)�ęCе���Է���ʽ�� 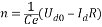 ��1.1�� ��1.1��
ʽ�� Ce��늄әC���~����ͨ�µ�늄ӄ�ϵ��(sh��)�� ���У�����늉����δ����}�ӣ������������ε��}�ӣ��}�ӵ��������ʹV-Mϵ�y(t��ng)���·���ܳ��F(xi��n)����B�m(x��)�͔��m(x��)�ɷN��r�����wԭ���ڴ������� �D1.2�L����������V-Mϵ�y(t��ng)�Cе���ԣ����а�����������B(t��i)����׃��B(t��i),����B�m(x��)�^(q��)��������m(x��)�^(q��)���ɈD��Ҋ����(d��ng)����B�m(x��)�r������߀���^Ӳ�����m(x��)�����Ԅt��ܛ�����ҳ��@���ķǾ��Ե����N��ʹ늄әC��������d�D(zhu��n)�ٺܸߣ��B�m(x��)�^(q��)�͔��m(x��)�^(q��)�ķֽ羀����(y��ng)��Ø= ��������ֻҪ����B�m(x��)�����l�ܿɿ��������Ϳ��Կ���һ�����ԵĿɿ�늉�Դ�� ��������ֻҪ����B�m(x��)�����l�ܿɿ��������Ϳ��Կ���һ�����ԵĿɿ�늉�Դ�� 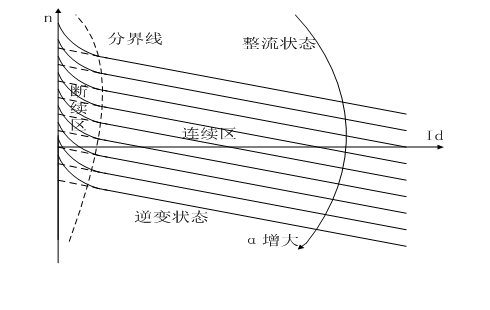
�D1.2 V-Mϵ�y(t��ng)�Cе���� 1.2 V-Mϵ�y(t��ng)�ķ�(w��n)�B(t��i)����ָ��(bi��o) �κ�һ�_��Ҫ�����D(zhu��n)�ٵ��O(sh��)�䣬�����a(ch��n)��ˇ���{(di��o)�����ܶ���һ����Ҫ�����{(di��o)��ϵ�y(t��ng)�D(zhu��n)�ٿ��Ƶ�Ҫ���������������棺 - �{(di��o)�� ����һ��������D(zhu��n)�ٺ�����D(zhu��n)�ٷ�����(n��i)���м���o�����{(di��o)��(ji��)�D(zhu��n)�٣�
- ��(w��n)������һ���ľ����������D(zhu��n)�ٷ�(w��n)���\�У��ڸ��N�ɔ_�²����S���^����D(zhu��n)�ٲ��ӣ��Դ_���a(ch��n)Ʒ�|(zh��)����
- �ӣ��p�����l�������ӣ��Ƅӵ��O(sh��)��Ҫ����٣��p�ٱM���죬��������a(ch��n)�ʣ������������ٶ�׃���ęCе�tҪ�����ӣ��ƄӱM��ƽ��(w��n)��
�����M(j��n)�ж����ķ�����ᘌ�ǰ���Ҫ���Q�����ɂ��{(di��o)��ָ��(bi��o)���Q���{(di��o)�ٷ������o���ʡ��@�ɂ�ָ��(bi��o)��Q���{(di��o)��ϵ�y(t��ng)�ķ�(w��n)�B(t��i)����ָ��(bi��o)�� ���a(ch��n)�CеҪ��늄әC�ṩ������D(zhu��n)��nmax�c����D(zhu��n)��nmin֮�ȱ����{(di��o)�ٷ�������D��ʾ,��  ��1.2�� ��1.2��
��(d��ng)ϵ�y(t��ng)��ijһ�D(zhu��n)�����\�Еr��ؓ(f��)�d��������d���ӵ��~��ֵ������(y��ng)���D(zhu��n)�ٽ����nN�c������d�D(zhu��n)��n0֮�ȱ����o����S����
 ��1.3�� ��1.3��
�@Ȼ���o�������Á������{(di��o)��ϵ�y(t��ng)��ؓ(f��)�d׃�����D(zhu��n)�ٵķ�(w��n)���ȵġ� ��(d��ng)Ȼ���{(di��o)�ٷ������o���ʃ��ָ��(bi��o)�����ǹ����ģ����ͬ�r����� ���x�����{(di��o)���^���У����~���D(zhu��n)�ٽ���ͬ���o���ʵĴ�С�c�D(zhu��n)�ٵĴ�С���P(gu��n)��������ٕr���o���ʝM��Ҫ����ô���ٕr�o���ʾ��M��Ҫ���ˡ���ˣ��{(di��o)��ϵ�y(t��ng)���o����ָ��(bi��o)��(y��ng)������D(zhu��n)�ٕr�����_(d��)���Ĕ�(sh��)ֵ���(zh��n)�� ��ô��������֮�g����ʲô�P(gu��n)ϵ�أ� һ����늄әC���~���D(zhu��n)��nN��������D(zhu��n)�٣�����ؓ(f��)�d�µ��D(zhu��n)�ٽ�����Nn���t  ��1.4�� ��1.4��
��Ҋ��������o���ʵ�Ҫ��Խ�ߣ���SԽС�r��ϵ�y(t��ng)�܉����S���{(di��o)�ٷ���ҲԽС������һ���{(di��o)��ϵ�y(t��ng)���{(di��o)�ٷ�����������D(zhu��n)�ٕr߀�ܝM���o���ʵ��D(zhu��n)�ٿ��{(di��o)������ 1.3�D(zhu��n)���]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ĽM�� �����D(zhu��n)��ؓ(f��)����ֱ��늄әC�{(di��o)��ϵ�y(t��ng)��ԭ��D��D1.2��ʾ�� 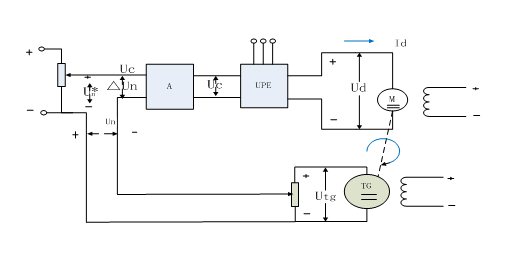
�D1.2 ���D(zhu��n)��ؓ(f��)����ֱ��늄әC�{(di��o)��ϵ�y(t��ng)��ԭ��D ���У����{(di��o)�����D(zhu��n)��n���o�����ǽo��늉�Un*���y�ٰl(f��)�әCTG���Եõ��c���y�D(zhu��n)�ٳ����ȵķ���늉�Un��UN*�cUN����^�õ��D(zhu��n)��ƫ��늉���Un����(j��ng)�^�����Ŵ���A���a(ch��n)��������׃�Q��UPE����Ŀ���늉�Uc�������Ŵ����ַQ��������P���{(di��o)��(ji��)�����]�h(hu��n)����ϵ�y(t��ng)���_�h(hu��n)����ϵ�y(t��ng)����Ҫ��e�������D(zhu��n)��n��(j��ng)�^�y��Ԫ��������ݔ��˅��c���ơ� 1.4 �]�h(hu��n)ϵ�y(t��ng)���o���� ������׃�Q�� Ud0=KsUc ֱ��늄әC  늉������h(hu��n)��(ji��) ��Un= Un*-Un �����{(di��o)��(ji��)�� Uc=Kp��Un �y�ٷ����h(hu��n)��(ji��) Un=��n ʽ��: Ks�����l���������Ŵ�ϵ��(sh��) Kp�������{(di��o)��(ji��)���ı����Ŵ�ϵ��(sh��) �����D(zhu��n)�ٷ���ϵ��(sh��) �������傀�P(gu��n)ϵʽ����ȥ���g׃�������õ��D(zhu��n)��ؓ(f��)����ֱ���{(di��o)��ϵ�y(t��ng)���o���Է���ʽ  = = ��1.5�� ��1.5��
ʽ�� K���]�h(hu��n)ϵ�y(t��ng)���_�h(hu��n)�Ŵ�ϵ��(sh��)�� �]�h(hu��n)ϵ�y(t��ng)���o���Ա�ʾ�]�h(hu��n)ϵ�y(t��ng)늄әC�D(zhu��n)���cؓ(f��)�d��������D(zhu��n)�أ��g�ķ�(w��n)�B(t��i)�P(gu��n)ϵ��������ʽ���c�_�h(hu��n)�Cе�������ƣ������|(zh��)�υs�кܴ�ą^(q��)�e���ʷQ֮�顰�o���ԡ���
2.�D(zhu��n)���]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ĄӑB(t��i)��(sh��)�W(xu��)ģ��2.1�f���ӑB(t��i)��(sh��)�W(xu��)ģ�͵��ƌ�(d��o)���E���Ҫ����ϵ�y(t��ng)�ĄӑB(t��i)���ܣ�������ӑB(t��i)푑�(y��ng)����ˣ�����Ƚ�������ϵ�y(t��ng)�ӑB(t��i)����Ҏ(gu��)�ɵĔ�(sh��)�W(xu��)ģ��[2]���D(zhu��n)���]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ĄӑB(t��i)��(sh��)�W(xu��)ģ�͵Ľ������E�ɷ֞飺��ϵ�y(t��ng)�֞������ϵ�y(t��ng)���քe�õ���ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�ͣ�����(j��)������ϵ�y(t��ng)�g���P(gu��n)ϵ��εó�ݔ���cݔ�����P(gu��n)ϵ����K�õ�ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�͡� 2.2�Ќ����έh(hu��n)��(ji��)�Ĕ�(sh��)�W(xu��)ģ���D(zhu��n)�ٷ�������ֱ���{(di��o)��ϵ�y(t��ng)��߀�б��^�h(hu��n)��(ji��)���Ŵ�h(hu��n)��(ji��)�������h(hu��n)��(ji��)��������푑�(y��ng)�������J(r��n)����˲�r�ģ���������Ă��f����(sh��)���������ķŴ�ϵ��(sh��)�� ���^�h(hu��n)��(ji��)����Un(s)= (s) ��2.1�� (s) ��2.1�� �Ŵ�h(hu��n)��(ji��)��Wa(s) = = Kp ��2.2�� = Kp ��2.2�� �����h(hu��n)��(ji��): Wfn(s) = ��2.3�� ��2.3�� 2.3�|�l(f��)�����h(hu��n)��(ji��)��(sh��)�W(xu��)ģ�͵��ƌ�(d��o) ���l���|�l(f��)�������b�õķŴ�ϵ��(sh��)KS���ɹ���������(n��i)������б�ʛQ����Ӌ�㹫ʽ�飺  ��2.4�� ��2.4��
�ڄӑB(t��i)�^���У��ɰѾ��l���|�l(f��)�c�����b�ÿ���һ��������h(hu��n)��(ji��)�������Ч��(y��ng)���ɾ��l�ܵ�ʧ�ؕr�g����ġ����ھ��l�ܴ��ھS����������c���@���������늉������ڿ���늉��Ġ�r�� ���ʧ�ؕr�gTsmax�ǃɂ�������Ȼ�Q���c֮�g�ĕr�g�����c�����Դ�l�ʺ;��l��������������P(gu��n)��  ��2.5�� ��2.5��
ʽ�� f�������Դ�l�� m��һ�܃�(n��i)����늉����}�_��(sh��) �ڌ��HӋ����һ�����ƽ��ʧ�ؕr�gTs= �� �� �Æ�λ�A�S����(sh��)��ʾ���t���l���|�l(f��)�c�����b�õ�ݔ���cݔ���P(gu��n)ϵ�飺  ��2.6�� ��2.6��
����������˹׃�Q��λ�ƶ������t���l���b�õĂ��f����(sh��)��  ��2.7�� ��2.7��
����ʽ��̩�ռ���(sh��)չ�_�ã�  ��2.8�� ��2.8��
2.4늄әC�h(hu��n)��(ji��)�Ĕ�(sh��)�W(xu��)ģ���ƌ�(d��o)����ֱ��늄әC���~������µĵ�Ч�·��D2.1��ʾ������늘л�·�����R��늸�L���������׃�Q����(n��i)�裬늘�����늸м����������·�н������������늸С� 
�D2.1늄әC��Ч�· �������·����B�m(x��)���ӑB(t��i)늉����̞飺  ��2.8�� ��2.8��
������ճ��Ħ���������D(zhu��n)�أ�늄әC�S�ϵĄ����W(xu��)��ʽ�飺  ��2.9�� ��2.9��
ʽ�� Tl������늄әC���d�D(zhu��n)���ڃ�(n��i)��ؓ(f��)�d�D(zhu��n)�� GD2������τ��b�����㵽늄әC�S�ϵ��w݆�T�� �~������µĸБ�(y��ng)늄ӄݺ�늴��D(zhu��n)�طքe�飺  ��2.10�� ��2.10��
 ��2.11�� ��2.11��
ʽ�� Cm��늄әC�~������µ��D(zhu��n)��ϵ��(sh��)�� �ٶ��x���Еr�g����(sh��)�� Tl��늘л�·늴ŕr�g����(sh��)�� ��2.12�� ��2.12�� Tm������τ�ϵ�y(t��ng)�C늕r�g����(sh��)�� ��2.13�� ��2.13�� ������ã�  ��2.14�� ��2.14��
 ��2.15�� ��2.15��
ʽ�� Idl��ؓ(f��)�d����� �����ʼ�l���£�ȡ��ʽ�ɂ�(c��)��������˹׃�Q���õ�늉��c����g�Ă��f����(sh��)�飺 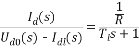 ��2.16�� ��2.16��
����c늄ӄ��g�Ă��f����(sh��)�飺 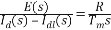 ��2.16�� ��2.16��
�քe������ʽ�ĄӑB(t��i)�Y(ji��)��(g��u)�D�քe��D 2.2 �͈D2.3��ʾ�� 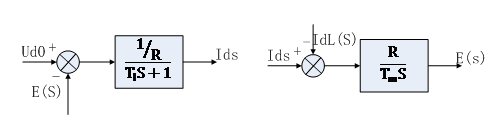
�D 2.2 �D 2.3 ���ɈD����һ�𣬲����]�� ���õ��~�������ֱ��늄әC�ĄӑB(t��i)�Y(ji��)��(g��u)�D����D2.4 ��ʾ 
�D2.4 ֱ��늄әC�ĄӑB(t��i)�Y(ji��)��(g��u)�D �ɈD2.5 ��֪���~������µ�ֱ��늄әC��һ�����A���ԭh(hu��n)��(ji��)��Tm��TL�ɂ��r�g����(sh��)�քe��ʾ�C늑T�Ժ�늴őT�ԡ� 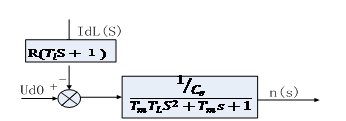
�D2.5 ֱ��늄әC�ĄӑB(t��i)�Y(ji��)��(g��u)�D��׃�� 2.5�D(zhu��n)���]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ĄӑB(t��i)��(sh��)�W(xu��)ģ��֪���˸����h(hu��n)��(ji��)�Ă��f����(sh��)�� �� ֻ��Ҫ����ϵ�y(t��ng)�е���P(gu��n)ϵ�M�ϣ� ��ɮ����]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ĄӑB(t��i)�Y(ji��)��(g��u)��D�� ��D2. 6 ��ʾ�� 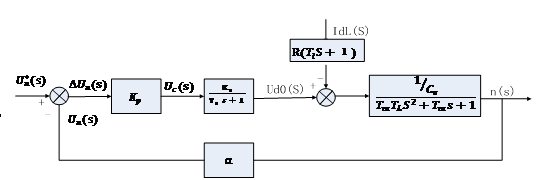
�D2. 6 �]�h(hu��n)ֱ���{(di��o)��ϵ�y(t��ng)�ĄӑB(t��i)�Y(ji��)��(g��u)��D
3.ϵ�y(t��ng)������֮��(w��n)���Է���3.1�_�h(hu��n)���f����(sh��)�ī@���ɈD2.6 ��֪���D(zhu��n)�ٷ������Ƶ�ֱ���{(di��o)��ϵ�y(t��ng)���_�h(hu��n)���f����(sh��)��  (3.1) (3.1)
ʽ�У� 3.2�]�h(hu��n)���f����(sh��)�ī@���O(sh��)IdL=0���Ľo��ݔ�����ÿ����D(zhu��n)�ٷ�������ֱ���{(di��o)��ϵ�y(t��ng)���]�h(hu��n)���f����(sh��)�ǣ� 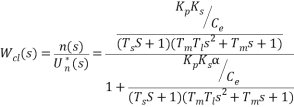
=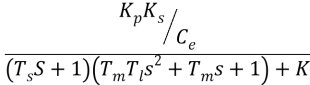 =  (3.2) (3.2) 3.3ϵ�y(t��ng)��(w��n)�����l(f��)�_(d��)����(sh��)K��Ҫ������(j��)��˹��(w��n)���Г�(j��)��֪���Ŵ�(sh��)K��(y��ng)�M��  (3.3) (3.3)
3.4 һ����ij���T�ٴ������_�τ�ϵ�y(t��ng)����ֱ��늄әC�����~����(sh��)��(j��)����;60KW,220V,305A,1000rpm,����V-Mϵ�y(t��ng)�����·�����R=0.18�W��늄әC늄ӄ�ϵ��(sh��)Ce=0.2V.min/r�� ��1�����Ҫ���{(di��o)�ٷ���D=0���o����s 5%,�����_�h(hu��n)�{(di��o)���ܷ�M�㣿��Ҫ��M���@��Ҫ��ϵ�y(t��ng)���~���ٽ� 5%,�����_�h(hu��n)�{(di��o)���ܷ�M�㣿��Ҫ��M���@��Ҫ��ϵ�y(t��ng)���~���ٽ� ������ж��٣� ������ж��٣� ��2�����T�ٴ�D=20, s��5%,��֪Ks=30�� ,Ce=0.2V.min/r,���ñ��������]�h(hu��n)�{(di��o)��ϵ�y(t��ng)�M������Ҫ��r�������Ŵ����ķŴ�ϵ��(sh��)��(y��ng)ԓ�ж��٣� ,Ce=0.2V.min/r,���ñ��������]�h(hu��n)�{(di��o)��ϵ�y(t��ng)�M������Ҫ��r�������Ŵ����ķŴ�ϵ��(sh��)��(y��ng)ԓ�ж��٣� ��3�����}��2���У�ϵ�y(t��ng)���õ���������ʽ�ɿ������·����֪늘л�·�����R=0.18�W��늸���L=3mh,ϵ�y(t��ng)�\�Ӳ��ֵ��w݆�T��GD2=60N.m2��ԇ�Єeϵ�y(t��ng)�ķ�(w��n)���ԡ� �⣺���}��� ��1����(d��ng)����B�m(x��)�r��V-Mϵ�y(t��ng)���~���ٽ��� 
�_�h(hu��n)ϵ�y(t��ng)���~���D(zhu��n)�ٕr���o���ʞ� 
��Ҋ���~���D(zhu��n)���Ѳ��ܝM��s5%��Ҫ����Ҫ�f������� ��Ҫ��D=20��s5%����Ҫ��  =2.63rpm =2.63rpm
��Ҋ���_�h(hu��n)�{(di��o)��ϵ�y(t��ng)���~���ٽ�̫�o���M��D=20��S5%��Ҫ�����D(zhu��n)�ٷ������Ƶ�ֱ���{(di��o)��ϵ�y(t��ng)���ǽ�Q����}��һ�N������ ��2���ɣ�1����֪���_�h(hu��n)ϵ�y(t��ng)�~���ٽ� ,�����˝M��Ҫ���]�h(hu��n)ϵ�y(t��ng)�~���ٽ���(y��ng)�� ,�����˝M��Ҫ���]�h(hu��n)ϵ�y(t��ng)�~���ٽ���(y��ng)�� 
������֪����(sh��)���t�� 
��ֻҪ�Ŵ����ķŴ�ϵ��(sh��)���ڻ����46���]�h(hu��n)ϵ�y(t��ng)���܉�M������ķ�(w��n)�B(t��i)����ָ��(bi��o)�� ��3��늴ŕr�g����(sh��)  �C늕r�g����(sh��)  ����������ʽ�����·�����l���b�õĕr�g����r�g����(sh��)��  ���˱��Cϵ�y(t��ng)��(w��n)�����_�h(hu��n)�Ŵ���ɳ����(y��ng)�M��ʽ(3.3)�ķ�(w��n)���l����  = =
���ӑB(t��i)��(w��n)����Ҫ��K<49.5�������}��2���Б�(y��ng)��K ������@�ӵı��������]�h(hu��n)ϵ�y(t��ng)�ĄӑB(t��i)��(w��n)���Ժͷ�(w��n)������Ҫ��rì�ܵģ�����ԓϵ�y(t��ng)�Dz���(w��n)���ġ� ������@�ӵı��������]�h(hu��n)ϵ�y(t��ng)�ĄӑB(t��i)��(w��n)���Ժͷ�(w��n)������Ҫ��rì�ܵģ�����ԓϵ�y(t��ng)�Dz���(w��n)���ġ�
4.�Y(ji��)Փ׃���{(di��o)����ֱ���{(di��o)��ϵ�y(t��ng)����Ҫ�{(di��o)�ٷ�����ϵ�y(t��ng)��Ӳ���Y(ji��)��(g��u)���ٰ����ɂ����֣��܉��{(di��o)��(ji��)ֱ��늄әC늘�늉���ֱ���Դ�ͮa(ch��n)�����{(di��o)�ٵ�ֱ��늄әC���ÿɿ�ֱ���Դ��ֱ��늄әC�M��һ���_�h(hu��n)ֱ��늄әC�{(di��o)��ϵ�y(t��ng)�r�����������Dz��ܺܺõĝM������ֵ�ġ���˿����O(sh��)Ӌһ�������D(zhu��n)�ٷ������Ƶ�ֱ��늄әC�{(di��o)��ϵ�y(t��ng)��������һ�����}������ֻ�Ǻ��ΝM�����o�����Լ��{(di��o)�ٷ�������ôϵ�y(t��ng)�����Dz���(w��n)���ģ�����O(sh��)Ӌ�r��Ҫ��ַ���ϵ�y(t��ng)�����Լ�ϵ�y(t��ng)��(w��n)���ėl�����x���m��(d��ng)?sh��)���������?/font>
������Word��ʽ�ęn51�����d��ַ��
 СՓ��.1 .docx
(721.98 KB, ���d��(sh��): 10)
СՓ��.1 .docx
(721.98 KB, ���d��(sh��): 10)
2017-12-20 19:41 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��