熱門(mén): 51單片機(jī) | 24小時(shí)必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂(lè)園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
熱門(mén): 51單片機(jī) | 24小時(shí)必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂(lè)園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
|
發(fā)布時(shí)間: 2023-11-17 11:20
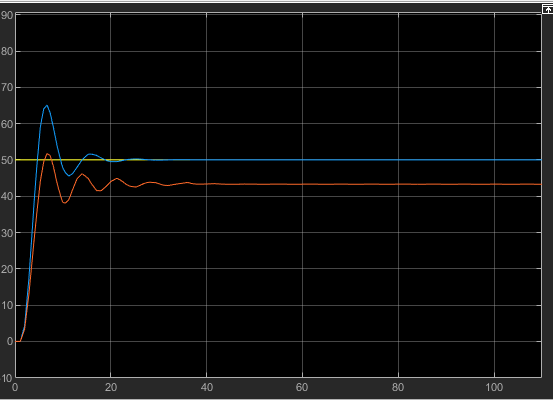
正文摘要:給一個(gè)50的單位階躍信號(hào),藍(lán)色的線是PID控制,橙色的線是模糊控制,為什么模糊控制的控制結(jié)果到不了50就穩(wěn)定了 |
|
所謂【模糊】是個(gè)假話,存在一個(gè)如何【模糊】的問(wèn)題,即【模糊】方案。 無(wú)論什么方案都是圍繞目標(biāo)來(lái)做的。 有時(shí)目標(biāo)參數(shù)有好幾個(gè)。 而達(dá)成某個(gè)目標(biāo)的方案也有N種,不過(guò)每種方案各有優(yōu)缺點(diǎn),如果某個(gè)方案只有優(yōu)點(diǎn),沒(méi)有缺點(diǎn),那么就其它方案也就【不存在】了。 以PID方案為例: P方案:真實(shí)、快速,但存在△P的誤差。 I方案:可以無(wú)差,但速度太慢。 D方案:能提前預(yù)測(cè)控制方向,但可能剎不住車(chē),過(guò)了頭,搞反了。 【模糊】是將各種方案結(jié)合應(yīng)用,在不同的條件下,采用不同的方案。 你也可以認(rèn)為PID方案是【模糊】中的一種方式。 【應(yīng)該要怎么調(diào)整模糊控制仿真的參數(shù)】取決于你對(duì)控制方案掌握多少種,每種方案的優(yōu)缺點(diǎn)是什么,應(yīng)用場(chǎng)景……,最后取舍部分,再一鍋燴。 不急,慢慢來(lái),知識(shí)需要積累。 |
yzwzfyz 發(fā)表于 2023-11-17 16:49 請(qǐng)問(wèn)為了對(duì)比PID和模糊控制的效果應(yīng)該要怎么調(diào)整模糊控制仿真的參數(shù)啊 |
|
PID:本身就一個(gè)無(wú)限趨近的過(guò)程。所謂穩(wěn)定,僅僅是給出了一個(gè)△小誤差作為判據(jù)。可了理解為“永遠(yuǎn)衰減振蕩”。 模糊控制:可能采用PID方案,也可能不采用PID方案。 它可以在控制初期采用PID,而接近目標(biāo)時(shí)取消了PID方案,采用一個(gè)估算恒定值作為控制輸入值。看上去穩(wěn)定了,但這時(shí)的輸出不一定是理想標(biāo)準(zhǔn)值,與標(biāo)準(zhǔn)有一個(gè)△差,只是它認(rèn)為△在允許范圍內(nèi),也就認(rèn)了。 |
Powered by 單片機(jī)教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
