|
發布時間: 2019-6-9 23:05
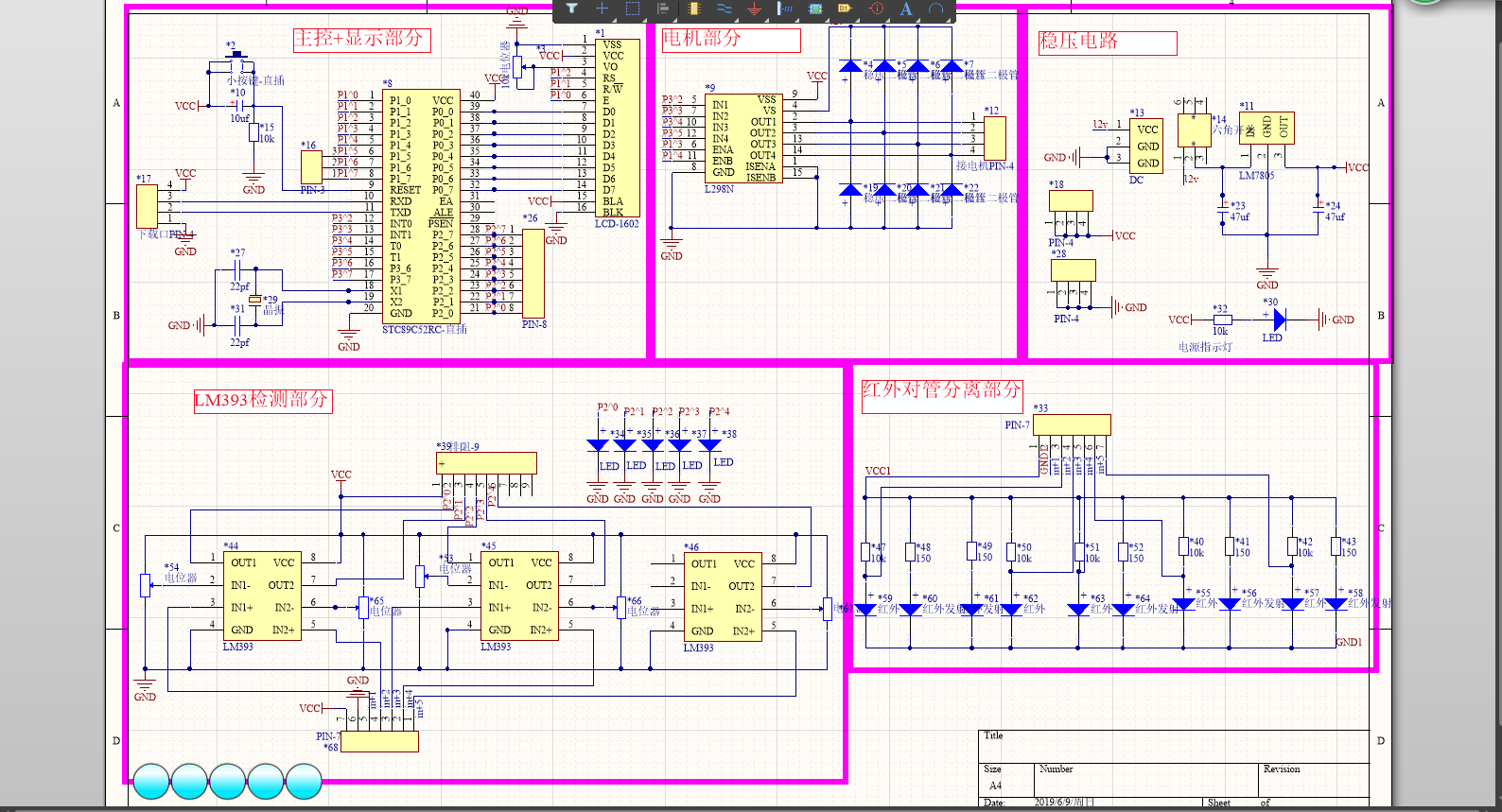
正文摘要:該智能車采用紅外傳感器對賽道進行道路檢測,單片機根據采集到的信號的不同狀態判斷小車當前狀態,通過電機驅動芯片L298N發出控制命令,控制電機的工作狀態以實現對小車姿態的控制。 &nb ... |
| 為什么我直接用的樓主的圖然后軟件說沒有封裝 |
藍牙模塊不需要么?我還要計算出最短的路程 |
| 感謝樓主 |
| 謝謝樓主的分享,努力學習中 |
|
想不到能在51黑上找到資源 謝謝樓主分享 |
| 謝謝樓主 |
| 資料很有用,感謝分享 |
| 一直在關注,非常值得學習 |
|
感謝分享 |
| 謝謝樓主 |
| 謝謝樓主分享了 |
 學習了,真不錯 學習了,真不錯 |
 收藏
收藏 頂
頂 踩
踩

