| 步進電動機工作原理 | |||||||||||||||
| Stepping Motor Principle | |||||||||||||||
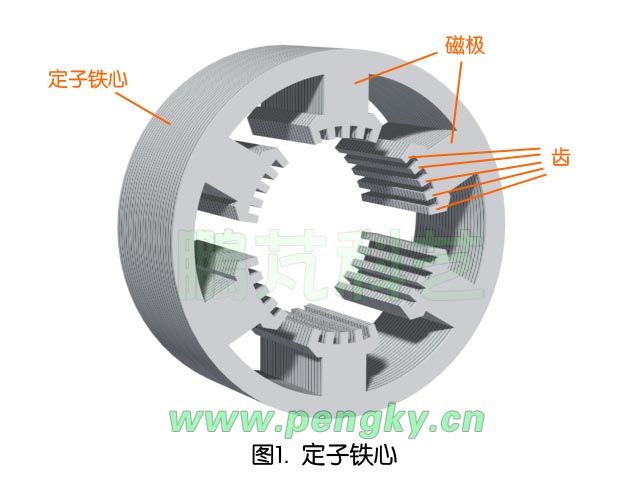
步進電動機的運轉狀態與普通電動機不同,它隨供給電源的脈沖一步一步的轉動,是一種數字電動機。步進電動機能隨供給的電源脈沖數轉動相應步數,而每一步的角度是固定的,所以步進電動機能按控制轉動所需的圈數、角度,廣泛應用在數控機床、自動化設備、儀器儀表等行業。本節介紹應用最廣的反應式步進電動機。 反應式步進電動機是根據磁阻性質產生轉矩工作的,遵循磁通總是沿磁阻最小的路徑閉合的原理,由磁拉力形成轉矩。前面介紹的開關磁阻電動機也可視為步進運行,因每切換一組線圈電源時轉子就轉動一定角度,只要停止切換轉子就停止不動了,只不過每一步的角度是30度,應用在數控設備顯然過于粗糙。實際應用的步進電動機步進角度較小,下面介紹的步進電動機模型每步為3度。 圖1是步進電動機的定子鐵心,在內周有六個磁極,每個磁極上有5個小齒,齒中心距為9度,齒寬與齒間隔大小一樣,徑向的兩個磁極組成一對磁極,定子鐵心由沖制的硅鋼片疊制而成。 | |||||||||||||||
| |||||||||||||||
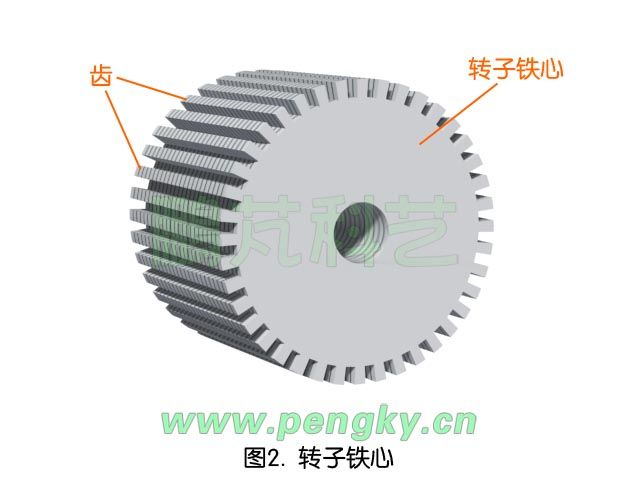
| 圖2是步進電動機的轉子鐵心,轉子上沒有線圈,但在外圓周有40個小齒,齒中心距為9度,齒寬與齒間隔大小一樣,轉子鐵心也由沖制的硅鋼片疊制而成。 | |||||||||||||||
| |||||||||||||||
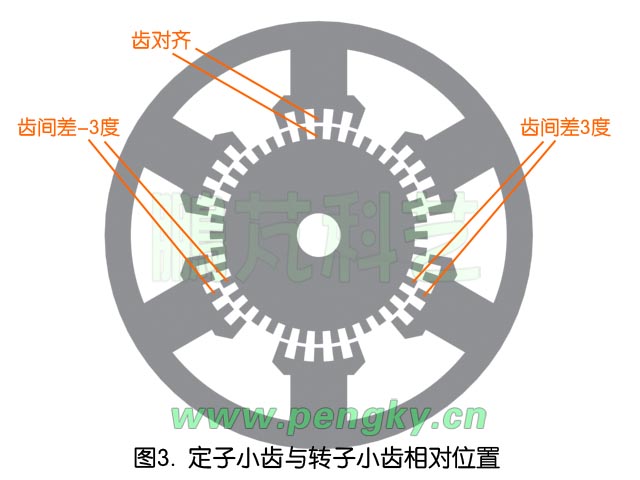
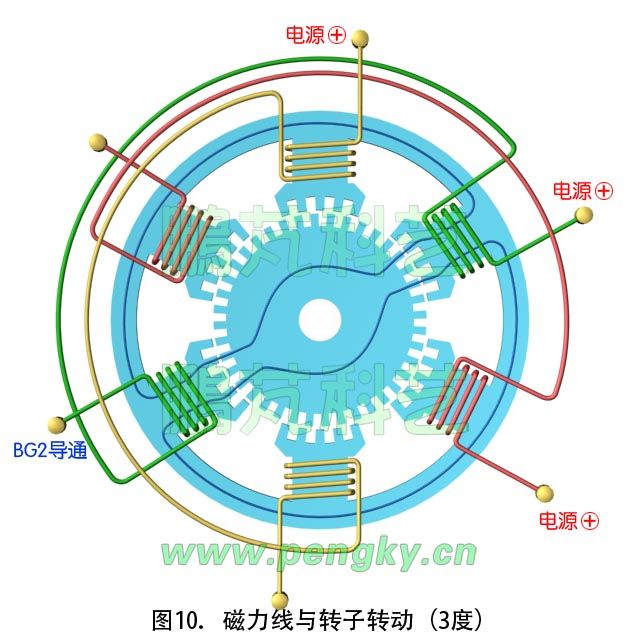
由于定子磁極上的小齒的齒寬與齒間隔與轉子上的小齒一樣,所以當定子的一對磁極小齒與轉子小齒對齊時,另兩對磁極小齒與轉子小齒角度相差3度或-3度,見圖3。 | |||||||||||||||
| |||||||||||||||
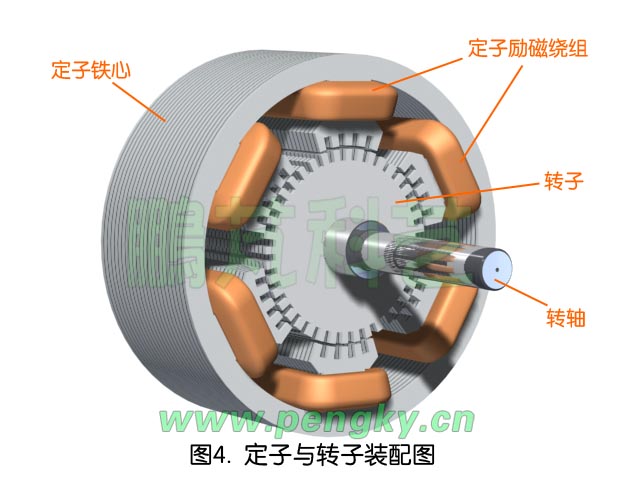
| 圖4是繞有線圈的定子與裝有轉軸的轉子組裝圖。 | |||||||||||||||
| |||||||||||||||
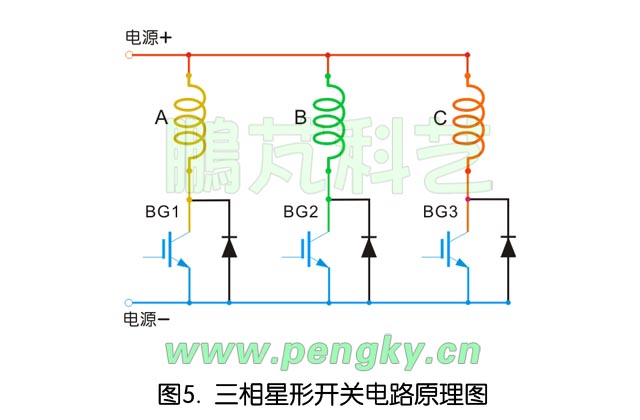
反應式步進電機多為三相線圈,本模型的三對磁極可繞三組線圈組成三相繞組。由脈沖信號發生器按照給定的設置不斷向步進電機驅動器發送控制脈沖信號,驅動器又根據轉動方向與運轉狀態向三相線圈供電(每輸入一個脈沖信號切換一次供電狀態),每一個控制脈沖電信號轉子轉動一步,每步轉的角度稱為步距角。 三相線圈分為A、B、C三個線圈,圖5是用三個開關晶體管向三個線圈供電的連接圖:三個線圈的一端與電源正極相連,另一端分別與驅動器內三個開關晶體管連接,構成星形連接。每個時期僅有一個開關晶體管導通一個線圈通電,這是一種基本的也是常用的工作方式。 | |||||||||||||||
| |||||||||||||||
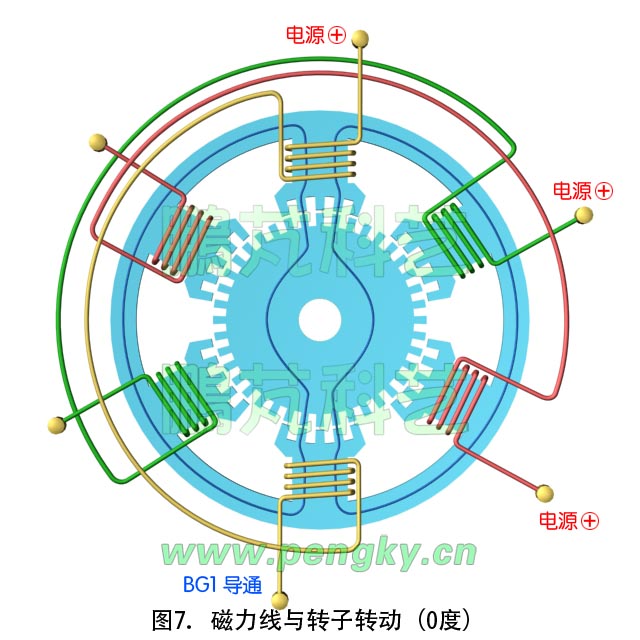
為了清楚的演示該步進電機模型的工作狀態,我們取模型的正視圖來作動畫,圖6是模型的正視圖,清楚的顯示了三相線圈的組合與連接,黃色線圈是A相線圈、綠色線圈是B相線圈、紅色線圈是C相線圈。 | |||||||||||||||
| |||||||||||||||
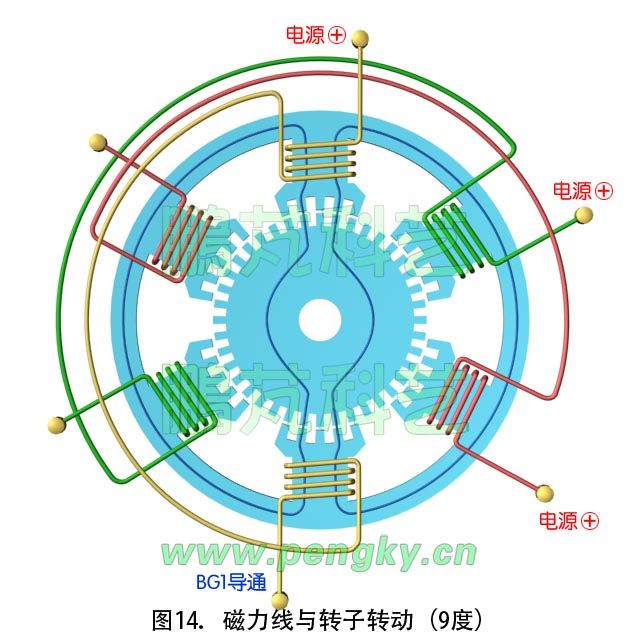
圖7是BG1導通A相線圈通電,此時轉子被磁力吸引靜止不動。 | |||||||||||||||
|