
































 06.把機架上已加工好的拆下來,做模本
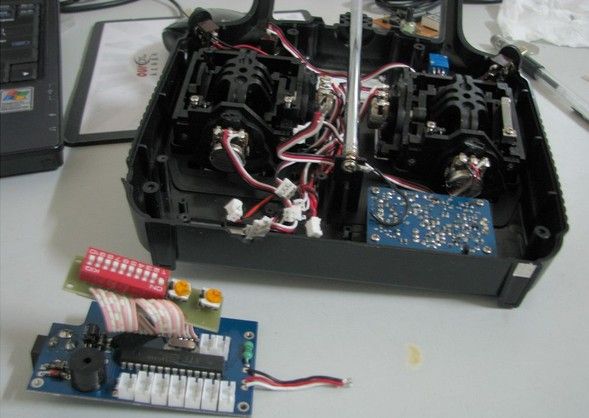
06.把機架上已加工好的拆下來,做模本  07.在一面貼上強力雙面膠
07.在一面貼上強力雙面膠  08.和待加工的圓片重疊在一起
08.和待加工的圓片重疊在一起 09.保證完全重合
09.保證完全重合 10.鉆出5.0mm的孔
10.鉆出5.0mm的孔 11.再用6.2mm的鉆頭做一下孔的沉頭效果,去除孔邊緣的棱角
11.再用6.2mm的鉆頭做一下孔的沉頭效果,去除孔邊緣的棱角 12.電機穿線孔完成
12.電機穿線孔完成 13.開始鉆尾管夾螺絲孔
13.開始鉆尾管夾螺絲孔 14.全部完成
14.全部完成 15.背面
15.背面 好了,電機固定片做完。下面該加工硬盤片了,用已做好的機架上硬盤片做模具,把盤片用雙面膠粘在一起盡量重合,然后用臺鉆開螺孔。這次買硬盤時沒注意,買到了傳說中的IBM玻璃盤 ,表面看起來和鋁盤片一樣,鉆孔時才發現不對勁,壓下鉆頭時居然鉆不下去,一使勁,盤片碎了,拿起來一看:玻璃盤 ,My god!!!16.加工硬盤片時,出現了意外。竟然買到了傳說中的IBM玻璃盤
好了,電機固定片做完。下面該加工硬盤片了,用已做好的機架上硬盤片做模具,把盤片用雙面膠粘在一起盡量重合,然后用臺鉆開螺孔。這次買硬盤時沒注意,買到了傳說中的IBM玻璃盤 ,表面看起來和鋁盤片一樣,鉆孔時才發現不對勁,壓下鉆頭時居然鉆不下去,一使勁,盤片碎了,拿起來一看:玻璃盤 ,My god!!!16.加工硬盤片時,出現了意外。竟然買到了傳說中的IBM玻璃盤
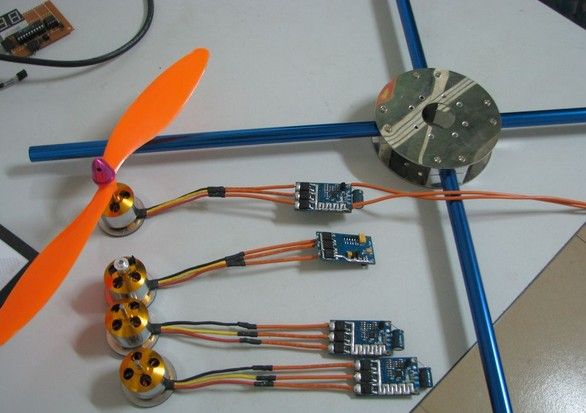
 18.早上剛到的電直配件
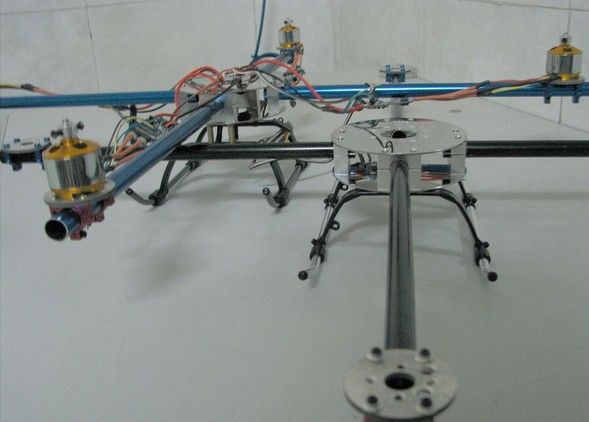
18.早上剛到的電直配件  19.電機固定座安裝完成的樣子
19.電機固定座安裝完成的樣子  20.旁邊的是450電直腳架
20.旁邊的是450電直腳架  21.電機固定座正面
21.電機固定座正面  22.近點看看
22.近點看看  23.覺得不過癮的話,再來個側面
23.覺得不過癮的話,再來個側面 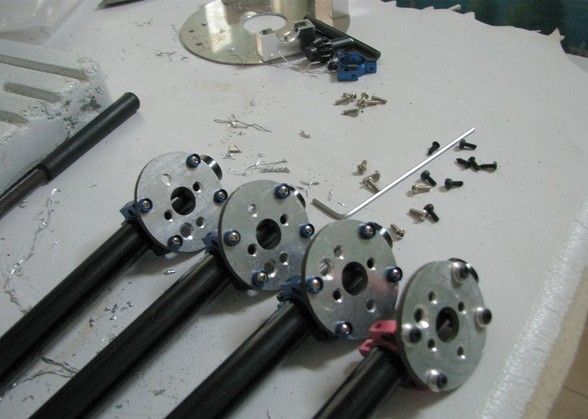
 24.背面尾管夾的固定情況
24.背面尾管夾的固定情況  25.換個角度
25.換個角度 26.用另一機架上的硬盤片裝上,看看效果先
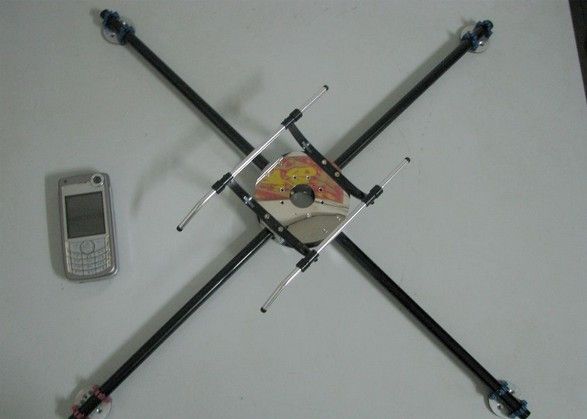
26.用另一機架上的硬盤片裝上,看看效果先  27.用原機架的硬盤片把新機架裝起來,看下效果先
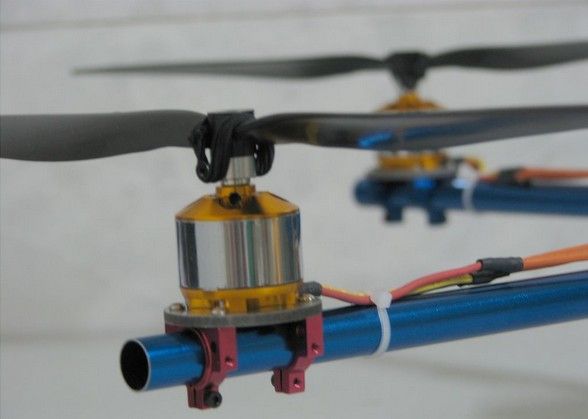
27.用原機架的硬盤片把新機架裝起來,看下效果先 28.四軸的“機頭”
28.四軸的“機頭” 29
29 30.
30. 31.仰視
31.仰視 32.俯視。整體工作已完成,現在只差硬盤片了
32.俯視。整體工作已完成,現在只差硬盤片了  沒辦法還得去一次電子市場。又買回兩塊舊硬盤,不管三七二十一趕快拆開看看,松了口氣,這回是鋁盤片。33.中午火速趕到華強北,買回3個硬盤
沒辦法還得去一次電子市場。又買回兩塊舊硬盤,不管三七二十一趕快拆開看看,松了口氣,這回是鋁盤片。33.中午火速趕到華強北,買回3個硬盤 34.幾乎8、9成新,看成色還能用,都是40G
34.幾乎8、9成新,看成色還能用,都是40G  35.不管三七二十一,拆開看看再說
35.不管三七二十一,拆開看看再說 36.都是單體盤片的
36.都是單體盤片的 37.盤片拆出來了,這回的是鋁盤
37.盤片拆出來了,這回的是鋁盤 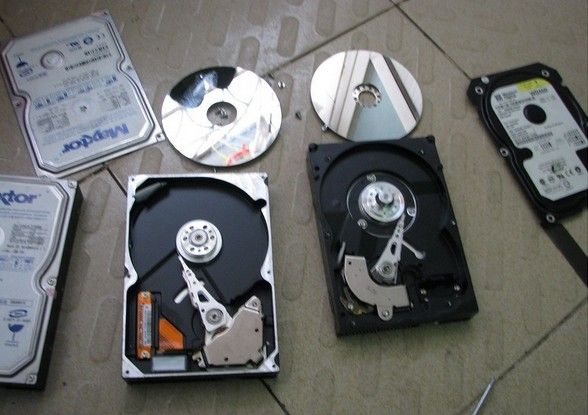 38.做廢的IBM玻璃盤
38.做廢的IBM玻璃盤  39.開工
39.開工 40.貼上雙面膠
40.貼上雙面膠 41.把盤片重疊放好42.再放第二張盤片
41.把盤片重疊放好42.再放第二張盤片  43.加工好的成品
43.加工好的成品  44.鉆孔邊緣都做了沉頭處理
44.鉆孔邊緣都做了沉頭處理 











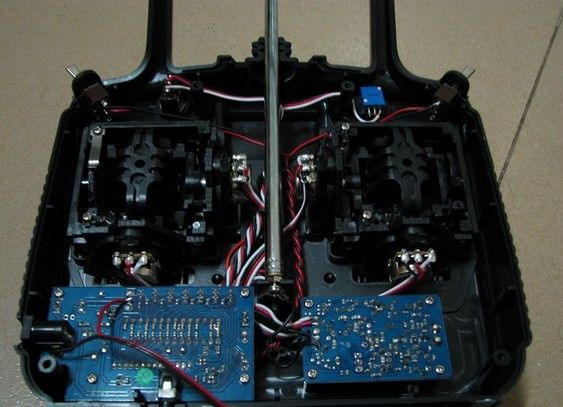
 2.拍圖片用的輔助工具
2.拍圖片用的輔助工具  3.接收板正面
3.接收板正面 4.背面,用的 31136G
4.背面,用的 31136G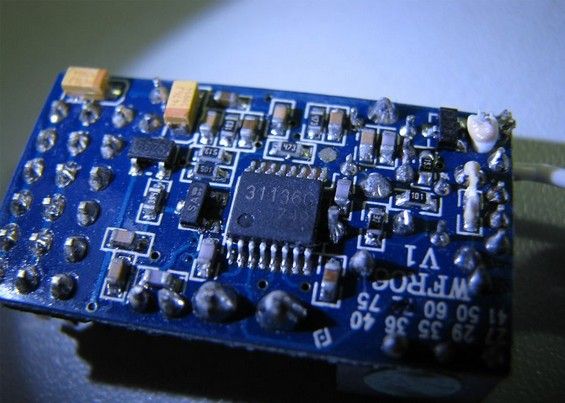 5.天線輸入端的加感線圈(小電感),可減短天線的長度
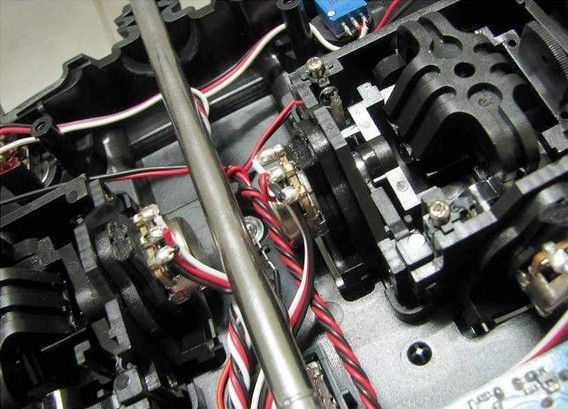
5.天線輸入端的加感線圈(小電感),可減短天線的長度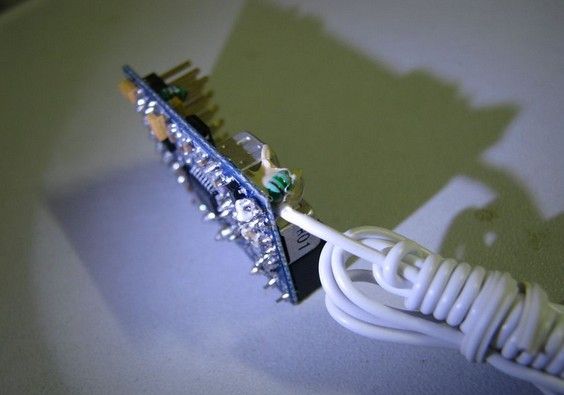 6.插針邊是6通道PWM的輸出隔離電阻,PPM信號在邏輯轉換芯片VHC164的1、2兩腳
6.插針邊是6通道PWM的輸出隔離電阻,PPM信號在邏輯轉換芯片VHC164的1、2兩腳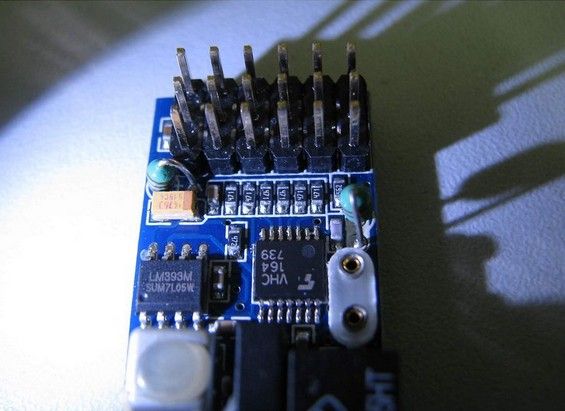 7.PPM信號從接收機第6通道引出,把輸出隔離電阻焊起來
7.PPM信號從接收機第6通道引出,把輸出隔離電阻焊起來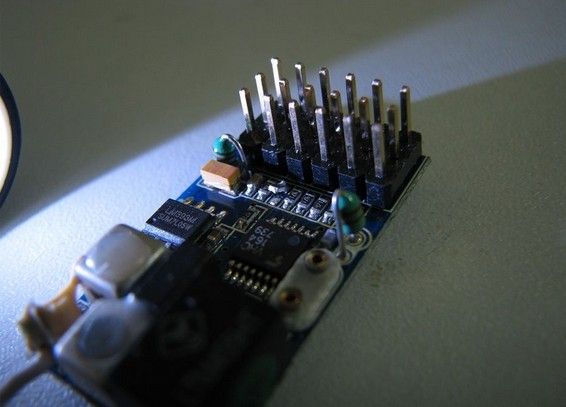 8.焊接完成。為安全起見烙鐵斷電焊接
8.焊接完成。為安全起見烙鐵斷電焊接 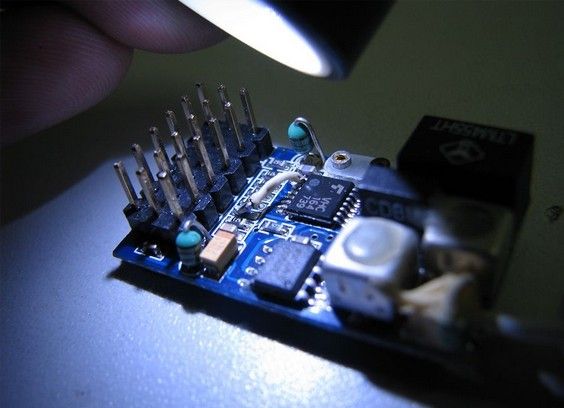 9.換個角度
9.換個角度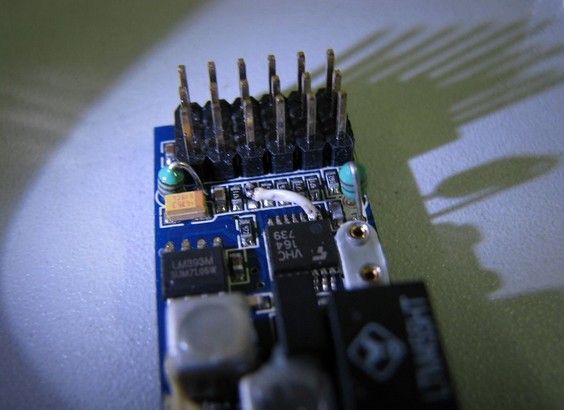 10.拿萬用表測已連通
10.拿萬用表測已連通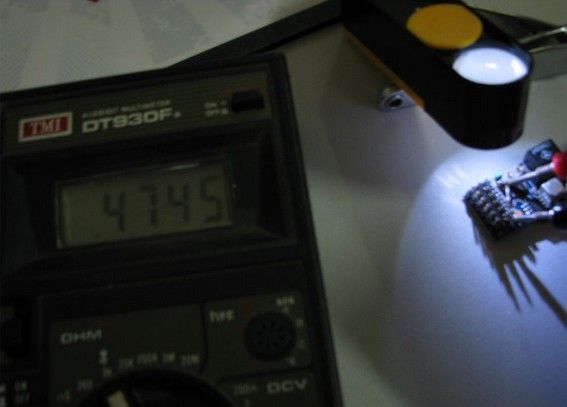 11.跟隨我多年的老功臣:4位半DT930F+
11.跟隨我多年的老功臣:4位半DT930F+  到這里為止,四軸飛行器的機架和遙控相關圖片已貼完了,馬馬虎虎做了一點圖片解說。機械結構對各位在座壇友達人來說,很容易看懂,我也就不多費口舌了 。 眼下四軸飛行器機架和外圍相關設備改造已大功告成,接下來到四軸的靈魂部分---飛控+電調了。為什么電調也算是四軸的靈魂部分呢?因為四軸要用的電調,還是有所不同的。各看官稍安勿躁,且聽我慢慢道來。 先說飛控的核心組成和大概原理,四軸飛行器相對于常規航模來說,最最復雜的就是電子部分了。之所以能飛行得很穩定,全拜電子控制部分的功勞。在常規固定翼飛機上,陀螺儀并非常用器件,在相對操控難度大點的直機上,如果不做自動穩定系統,也只是鎖尾才用到陀螺儀。四軸飛行器與其不同的地方是必須配備陀螺儀,這是最基本要求,不然無法飛行,更談不上飛穩了。不但要有,還得是3軸向(X、Y、Z)都得有,這是四軸飛行器的機械結構、動力組成特性決定的。在此基礎上再輔以3軸加速度傳感器,這6個自由度,就組成了飛行姿態穩定的基本部分,也是關鍵核心部分---慣性導航模塊,簡稱IMU。飛行中的姿態感測全靠這個IMU了,可見它是整架模型的核心部件。 再說說電調,四軸飛行器有四個槳(純屬費話:em15: ),兩兩相對呈十字交叉結構,在槳的轉向上分正轉和反轉,這樣可抵消模型自身的旋轉。每個槳的直徑很小,通常是10寸左右。四個槳轉動時的離心力是分散的。不象直機的槳,只有一個能產生集中的離心力形成陀螺性質的慣性離心力,保持機身不容易很快的側翻掉。所以通常用到的舵機控制信號更新頻率很低。四軸為了能夠快速反應,以應對姿態變化引起的飄移,需要高反應速度的電調,常規PPM電調的更新速度只有50Hz左右,滿足不了這種控制所需要的速度,且PPM電調MCU內置PID穩速控制,能對常規航模提供順滑的轉速變化特性,用在四軸上就不合適了,四軸需要的是快速反應的電機轉速變化。用高速專用電調,IIC總線接口傳送控制信號,可達到每秒幾百上千次的電機轉速變化,在四軸飛行時,姿態時刻能夠保持穩定。即使受到外力突然沖擊,依舊安然無恙。 我是個行動派+實干派,文字描述能力欠佳,讀書時的那點寫作文的“天份”,早就還給老師了。還是用圖片說話吧,這樣來得直接點。 接下來是IIC高速電調,這個也是自已通過測試、不斷完善才制作成功的。以前在另一個帖子有發過,一時找不到了。四軸飛行器的整機重量+3S鋰聚電池通常在800g上下,懸停總電流最大不超過12A,分攤到每個電調上也就3~4A電流,考慮到可能出現的機身姿態大動態變化的情況,單個電調能提供25A的峰值電流已足夠了。所以我做的電調只用了6個MOS管,測試過整機持續電流20A 工作20分鐘,電調工作良好,這樣的表現完全夠四軸用了。再大的電流沒條件測試了,我的直流電源只能提供到20A。 先貼幾張實驗時的電調板子圖片。* 電調測試板,新西達2212A電機,KV930
到這里為止,四軸飛行器的機架和遙控相關圖片已貼完了,馬馬虎虎做了一點圖片解說。機械結構對各位在座壇友達人來說,很容易看懂,我也就不多費口舌了 。 眼下四軸飛行器機架和外圍相關設備改造已大功告成,接下來到四軸的靈魂部分---飛控+電調了。為什么電調也算是四軸的靈魂部分呢?因為四軸要用的電調,還是有所不同的。各看官稍安勿躁,且聽我慢慢道來。 先說飛控的核心組成和大概原理,四軸飛行器相對于常規航模來說,最最復雜的就是電子部分了。之所以能飛行得很穩定,全拜電子控制部分的功勞。在常規固定翼飛機上,陀螺儀并非常用器件,在相對操控難度大點的直機上,如果不做自動穩定系統,也只是鎖尾才用到陀螺儀。四軸飛行器與其不同的地方是必須配備陀螺儀,這是最基本要求,不然無法飛行,更談不上飛穩了。不但要有,還得是3軸向(X、Y、Z)都得有,這是四軸飛行器的機械結構、動力組成特性決定的。在此基礎上再輔以3軸加速度傳感器,這6個自由度,就組成了飛行姿態穩定的基本部分,也是關鍵核心部分---慣性導航模塊,簡稱IMU。飛行中的姿態感測全靠這個IMU了,可見它是整架模型的核心部件。 再說說電調,四軸飛行器有四個槳(純屬費話:em15: ),兩兩相對呈十字交叉結構,在槳的轉向上分正轉和反轉,這樣可抵消模型自身的旋轉。每個槳的直徑很小,通常是10寸左右。四個槳轉動時的離心力是分散的。不象直機的槳,只有一個能產生集中的離心力形成陀螺性質的慣性離心力,保持機身不容易很快的側翻掉。所以通常用到的舵機控制信號更新頻率很低。四軸為了能夠快速反應,以應對姿態變化引起的飄移,需要高反應速度的電調,常規PPM電調的更新速度只有50Hz左右,滿足不了這種控制所需要的速度,且PPM電調MCU內置PID穩速控制,能對常規航模提供順滑的轉速變化特性,用在四軸上就不合適了,四軸需要的是快速反應的電機轉速變化。用高速專用電調,IIC總線接口傳送控制信號,可達到每秒幾百上千次的電機轉速變化,在四軸飛行時,姿態時刻能夠保持穩定。即使受到外力突然沖擊,依舊安然無恙。 我是個行動派+實干派,文字描述能力欠佳,讀書時的那點寫作文的“天份”,早就還給老師了。還是用圖片說話吧,這樣來得直接點。 接下來是IIC高速電調,這個也是自已通過測試、不斷完善才制作成功的。以前在另一個帖子有發過,一時找不到了。四軸飛行器的整機重量+3S鋰聚電池通常在800g上下,懸停總電流最大不超過12A,分攤到每個電調上也就3~4A電流,考慮到可能出現的機身姿態大動態變化的情況,單個電調能提供25A的峰值電流已足夠了。所以我做的電調只用了6個MOS管,測試過整機持續電流20A 工作20分鐘,電調工作良好,這樣的表現完全夠四軸用了。再大的電流沒條件測試了,我的直流電源只能提供到20A。 先貼幾張實驗時的電調板子圖片。* 電調測試板,新西達2212A電機,KV930 * 全部使用N-MOS,TO-220封裝
* 全部使用N-MOS,TO-220封裝 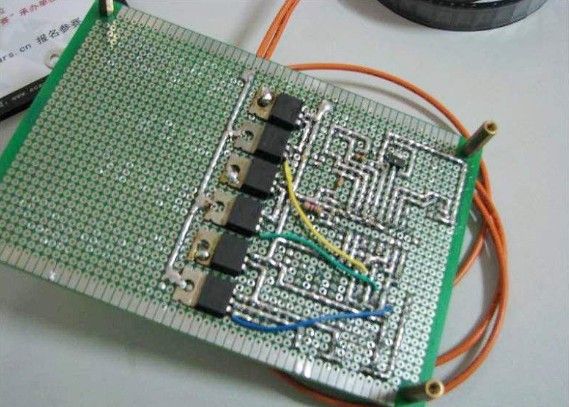 * 測試用的15V20A直流電源
* 測試用的15V20A直流電源  下面來真的了 ,打板子做的電調,用上了電調常用的高頻電解電容,以前沒接觸過這些東西,不曉得還有高頻電容這回事 電調板子上有條飛線,是用來測試的,正常使用中需拆除。 1.電調板焊完正面
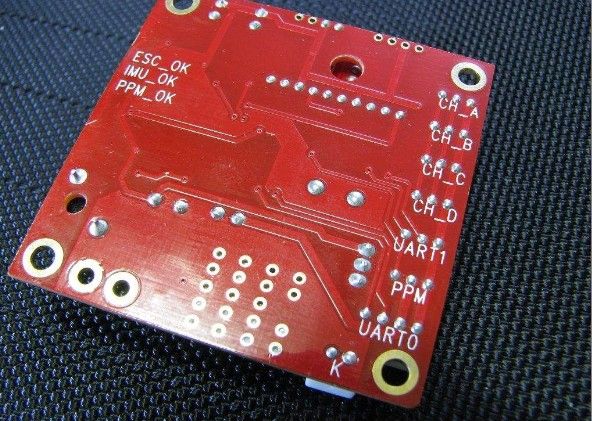
下面來真的了 ,打板子做的電調,用上了電調常用的高頻電解電容,以前沒接觸過這些東西,不曉得還有高頻電容這回事 電調板子上有條飛線,是用來測試的,正常使用中需拆除。 1.電調板焊完正面 2.電調板反面
2.電調板反面 3.持續電流可達14A以上
3.持續電流可達14A以上 4.電調板焊完正面
4.電調板焊完正面 5.電調板反面
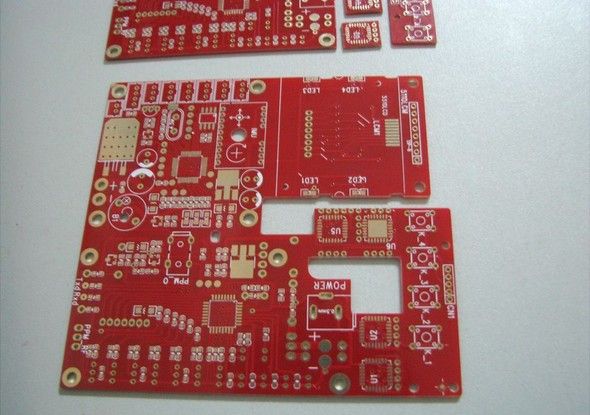
5.電調板反面 6.電調PCB,四塊一套
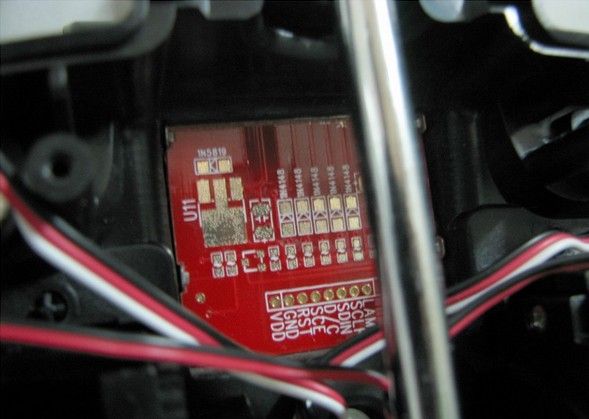
6.電調PCB,四塊一套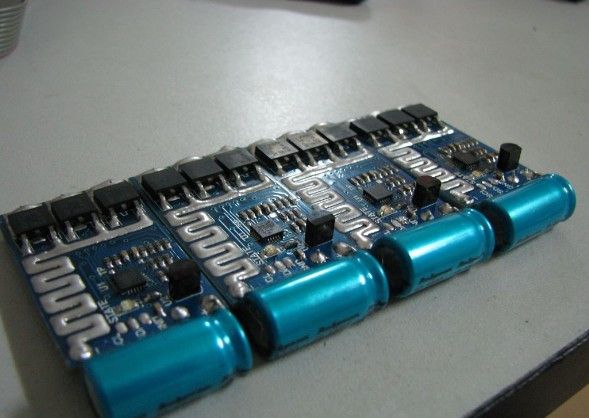 飛控板也已完工,該上上圖片了。飛控板的核心就是IMU慣導模塊,先貼IMU的吧。IMU由三軸陀螺儀和三軸加速度計協同組成,是整個飛控板乃至整架模型的核心,有了它才算具備飛行穩定的先天條件。為了飛行性能的提升和提高飛控實現的成功率,陀螺儀選用了MEMS工藝的LISY300AL,300度/秒感測量程,工作電壓3V3,和飛控的CPU工作電壓一致,用ADC采集陀螺儀的輸出信號。加速度計是IIC接口的LIS3LV02DQ,每個感測軸都可設置軸滾動觸發功能,用來感測飛行器姿態滾轉,在飛行失控時可觸發降落傘裝置,使飛行器安全著陸。此功能做為備選項,暫放一邊不管它,先從最簡單的功能做起。限于個人能力,功能不急著搞得太多,以免目標太高對自已失去信心。7.IMU模塊PCB尺寸
飛控板也已完工,該上上圖片了。飛控板的核心就是IMU慣導模塊,先貼IMU的吧。IMU由三軸陀螺儀和三軸加速度計協同組成,是整個飛控板乃至整架模型的核心,有了它才算具備飛行穩定的先天條件。為了飛行性能的提升和提高飛控實現的成功率,陀螺儀選用了MEMS工藝的LISY300AL,300度/秒感測量程,工作電壓3V3,和飛控的CPU工作電壓一致,用ADC采集陀螺儀的輸出信號。加速度計是IIC接口的LIS3LV02DQ,每個感測軸都可設置軸滾動觸發功能,用來感測飛行器姿態滾轉,在飛行失控時可觸發降落傘裝置,使飛行器安全著陸。此功能做為備選項,暫放一邊不管它,先從最簡單的功能做起。限于個人能力,功能不急著搞得太多,以免目標太高對自已失去信心。7.IMU模塊PCB尺寸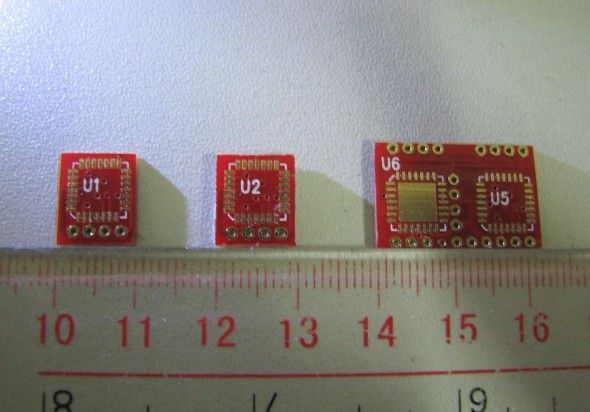 8.IMU模塊組裝好的樣子
8.IMU模塊組裝好的樣子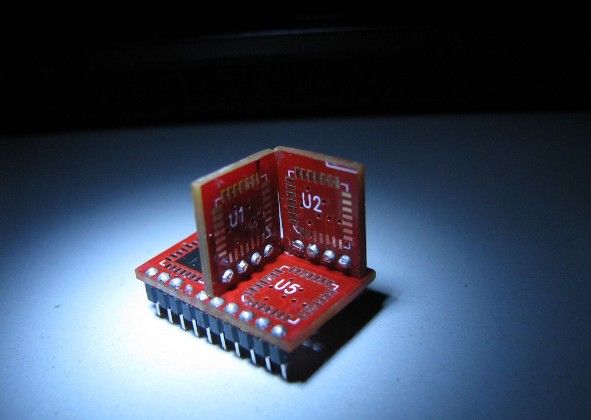 9.這邊是加速計
9.這邊是加速計 因選型的ST陀螺儀當時市場上沒現貨,找到一家代貨公司直接從ST原廠買進,價格很貴。在抱著無限耐心中等待了漫長的兩個星期后,總算是拿到了。10.ST陀螺儀芯片
因選型的ST陀螺儀當時市場上沒現貨,找到一家代貨公司直接從ST原廠買進,價格很貴。在抱著無限耐心中等待了漫長的兩個星期后,總算是拿到了。10.ST陀螺儀芯片  11.LISY300AL
11.LISY300AL  12.MEMS單軸陀螺儀
12.MEMS單軸陀螺儀 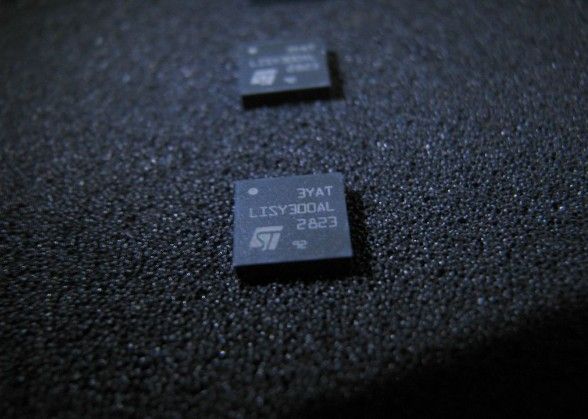 13.LGA28封裝
13.LGA28封裝 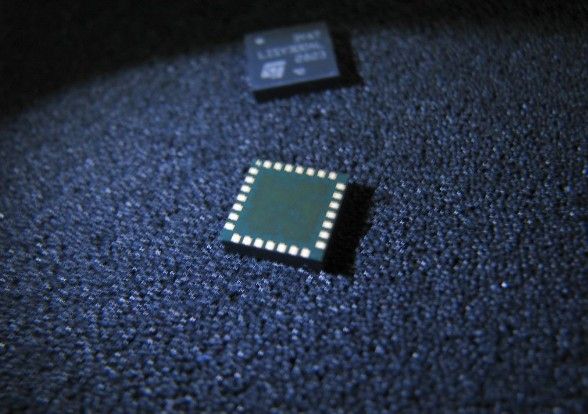 14.3軸陀螺儀,模擬軸出
14.3軸陀螺儀,模擬軸出 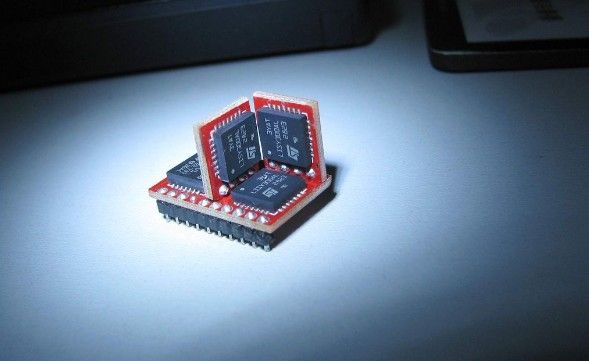 15.3軸加速計,使用IIC接口
15.3軸加速計,使用IIC接口  全部完工的飛控板。 板上接口共計有4路電調、1路PPM輸入、2路UART通信串口,可接數傳電臺、GPS。另有一路可控的11V輸出,用來接高亮LED發光條做夜航燈用。 蜂鳴器做操作必要的提示音用,電池低電時可通過發音提醒操作者需要著陸更換電池了。16. 飛控板完成效果圖
全部完工的飛控板。 板上接口共計有4路電調、1路PPM輸入、2路UART通信串口,可接數傳電臺、GPS。另有一路可控的11V輸出,用來接高亮LED發光條做夜航燈用。 蜂鳴器做操作必要的提示音用,電池低電時可通過發音提醒操作者需要著陸更換電池了。16. 飛控板完成效果圖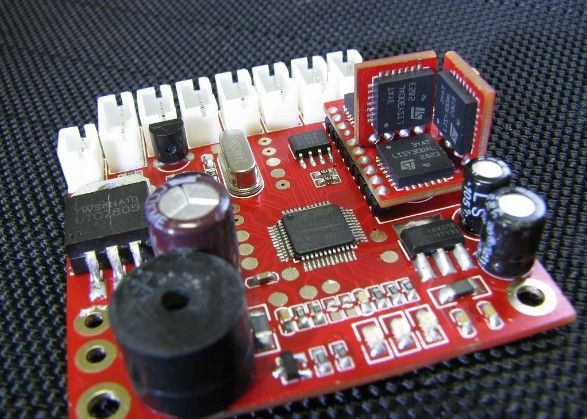




 安裝完成的樣子
安裝完成的樣子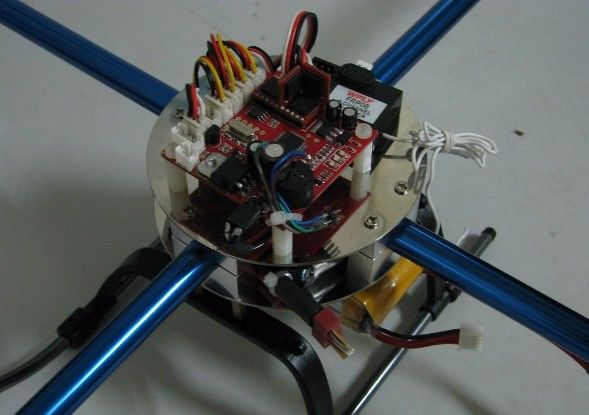 電池掛在中心架下面,用彈力帶和魔術貼固定
電池掛在中心架下面,用彈力帶和魔術貼固定  另加了四個彈性腳架,防止過分摔機
另加了四個彈性腳架,防止過分摔機 傳個圖上來吧,很多人搞不明白四軸飛行器如何能旋轉飛行。要注意的是,4個槳分兩組,一組正槳,一組反槳,兩組槳出現轉速差,那么動平衡就沒了,飛行器對外呈現整體旋轉力,根據正、反槳的轉速不同,實現左旋右旋。
傳個圖上來吧,很多人搞不明白四軸飛行器如何能旋轉飛行。要注意的是,4個槳分兩組,一組正槳,一組反槳,兩組槳出現轉速差,那么動平衡就沒了,飛行器對外呈現整體旋轉力,根據正、反槳的轉速不同,實現左旋右旋。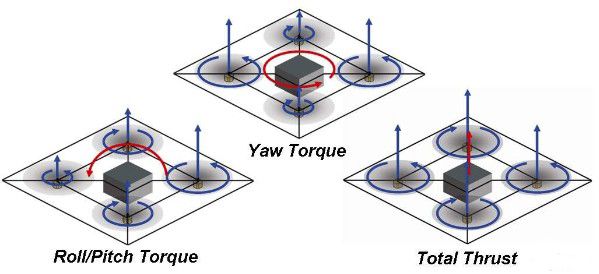 前幾天傍晚在小區籃球場飛四軸,當時有2級左右的風,在飛第二塊電池時沒控制好高度,在做了個連續旋轉平飛的動作后,四軸被風吹得飄遠了,眼看著要撞上樓房了,一時情急亂了手腳,沒控制好。四軸撞上房子后從4層樓的高度直接掉下來,摔到了水泥地面上,機架摔損嚴重。所幸的是飛控板、電調、電機、電池都沒受傷。這兩天又重新制作了一款更輕的機架,模仿MK的結構。感覺這樣簡單的才實用,用電直配件做出的機架,看著漂亮,但造價太貴了。摔壞的機架,過兩天再看下能否修復。 02.碳纖四軸飛行器
前幾天傍晚在小區籃球場飛四軸,當時有2級左右的風,在飛第二塊電池時沒控制好高度,在做了個連續旋轉平飛的動作后,四軸被風吹得飄遠了,眼看著要撞上樓房了,一時情急亂了手腳,沒控制好。四軸撞上房子后從4層樓的高度直接掉下來,摔到了水泥地面上,機架摔損嚴重。所幸的是飛控板、電調、電機、電池都沒受傷。這兩天又重新制作了一款更輕的機架,模仿MK的結構。感覺這樣簡單的才實用,用電直配件做出的機架,看著漂亮,但造價太貴了。摔壞的機架,過兩天再看下能否修復。 02.碳纖四軸飛行器 03.別看錯了,是兩個
03.別看錯了,是兩個 04.中心架用尼龍螺絲固定
04.中心架用尼龍螺絲固定 05.換個角度
05.換個角度 06.這里要裝電池,螺絲反過來裝
06.這里要裝電池,螺絲反過來裝 07.機架的凈重
07.機架的凈重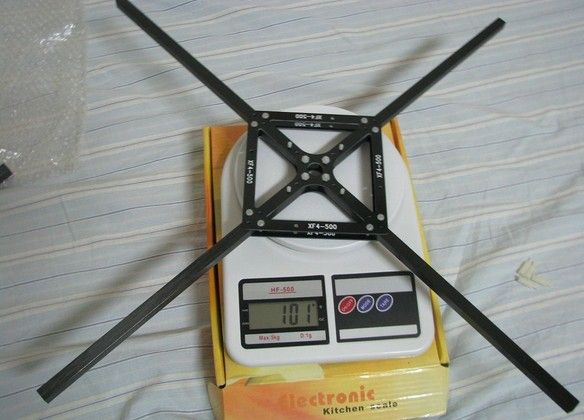 08.兩個一起的重量
08.兩個一起的重量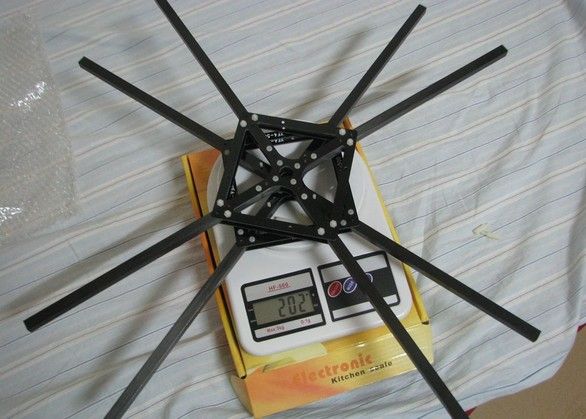 09.新買的XXD2212電機
09.新買的XXD2212電機 10.裝上電機后的重量
10.裝上電機后的重量 11.新焊的電調板
11.新焊的電調板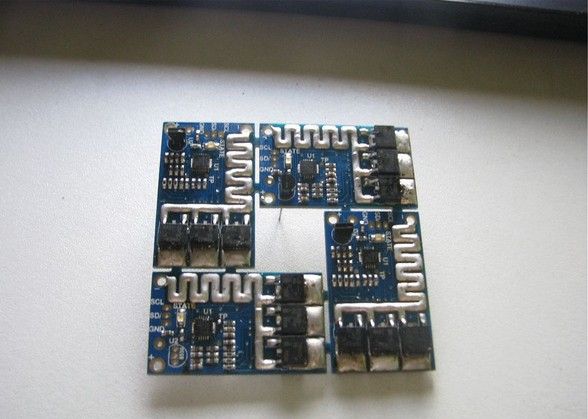 12.新焊的電調板
12.新焊的電調板 13.裝上電調和飛控板
13.裝上電調和飛控板 14.飛控板
14.飛控板 15.裝完了,上電看看效果
15.裝完了,上電看看效果 16.來個近距離的
16.來個近距離的 新機架電路部分徹底完工了,剩下腳架暫時沒想到好方法,沒有做上去。今晚在室內試飛,看看新機架有無穩定性問題。首飛2分鐘后,降落重新標定陀螺儀中立點,再次飛行中,一時大意撞上了凳子,小炸一下,洗衣粉袋子慘遭破皮。 后在室外進行了Z軸連續旋轉平飛測試,效果比之前有大幅進步,搖桿操控手感靈敏,四軸反應動作麻利,抗風能力也有明顯提高。懸停表現還不太滿意,遙控無操作情況下最長能保持5、6秒不漂移,得繼續努力。由于相機SD卡壞掉,無法拍下飛行過程。 本人的操作水平略有提高在室內測試偏航感度效果很滿意,房間太小,連續快速水平旋轉的動作沒做測試。新代碼里加入了上電無遙控信號告警、飛行中遙控信號丟失時告警、飛機回到水平姿態執行自動降落動作,這個功能需要在室外測試。測試拍的視頻用軟件編輯后轉RM,出來的圖象慘不忍睹,試了N種方法和格式,在網上下了好幾款視頻后期編輯軟件,要么不好用,要么轉出來的圖象一塌糊涂。一直拖到今天,才算弄得象點樣子。把我的全金屬機架又裝起來了,單向碳纖容易裂,編織的太貴,并且沒有方形的,還是鋁管來得實在!
新機架電路部分徹底完工了,剩下腳架暫時沒想到好方法,沒有做上去。今晚在室內試飛,看看新機架有無穩定性問題。首飛2分鐘后,降落重新標定陀螺儀中立點,再次飛行中,一時大意撞上了凳子,小炸一下,洗衣粉袋子慘遭破皮。 后在室外進行了Z軸連續旋轉平飛測試,效果比之前有大幅進步,搖桿操控手感靈敏,四軸反應動作麻利,抗風能力也有明顯提高。懸停表現還不太滿意,遙控無操作情況下最長能保持5、6秒不漂移,得繼續努力。由于相機SD卡壞掉,無法拍下飛行過程。 本人的操作水平略有提高在室內測試偏航感度效果很滿意,房間太小,連續快速水平旋轉的動作沒做測試。新代碼里加入了上電無遙控信號告警、飛行中遙控信號丟失時告警、飛機回到水平姿態執行自動降落動作,這個功能需要在室外測試。測試拍的視頻用軟件編輯后轉RM,出來的圖象慘不忍睹,試了N種方法和格式,在網上下了好幾款視頻后期編輯軟件,要么不好用,要么轉出來的圖象一塌糊涂。一直拖到今天,才算弄得象點樣子。把我的全金屬機架又裝起來了,單向碳纖容易裂,編織的太貴,并且沒有方形的,還是鋁管來得實在! 有刷電機版四旋翼飛行器,用商品飛行器改裝實現,飛行穩定,手可以輕松脫控。泡沫的東東,玩起來很有安全感 ,況且還有槳保護圈。有刷電機+減速組,效率相當不錯,一塊滿電的 3S 1500mA 電池可以持續飛行18分鐘。放個有刷的出來給大家換換感覺。 改裝完成的有刷電機版四旋翼飛行器
有刷電機版四旋翼飛行器,用商品飛行器改裝實現,飛行穩定,手可以輕松脫控。泡沫的東東,玩起來很有安全感 ,況且還有槳保護圈。有刷電機+減速組,效率相當不錯,一塊滿電的 3S 1500mA 電池可以持續飛行18分鐘。放個有刷的出來給大家換換感覺。 改裝完成的有刷電機版四旋翼飛行器
 森林大大能不能分享下控制代碼哈哈哈
森林大大能不能分享下控制代碼哈哈哈| 歡迎光臨 (http://m.raoushi.com/bbs/) | Powered by Discuz! X3.1 |