欧美极品高清xxxxhd,国产日产欧美最新,无码AV国产东京热AV无码,国产精品人与动性XXX,国产传媒亚洲综合一区二区,四库影院永久国产精品,毛片免费免费高清视频,福利所导航夜趣136
��(bi��o)�}:
51��Ƭ�C(j��)ѭ�EС܇�������Y(ji��) ������Դ�a
[��ӡ���]
����:
hongniu
�r(sh��)�g:
2015-6-23 19:05
��(bi��o)�}:
51��Ƭ�C(j��)ѭ�EС܇�������Y(ji��) ������Դ�a
��������� hongniu �� 2015-6-23 19:08 ��
�ҵ�ѭ�EС܇�v��(j��ng)�����죬
�����Ċ^��(zh��n)�K���c��������Ѳ�E�ɹ��ˣ����Y(ji��)һ���������ի@���ǣ�ץס�P(gu��n)�I�c(di��n)���Y(ji��)�c(di��n)�¼����Ȱ����P(gu��n)�I�Ć��}���Խ�Q���Ժ�(li��n)�{(di��o)ԇ�r(sh��)��(hu��)�ܿ�ģ�߀��һ�c(di��n)���e�˵Ė|����һ���nj�(du��)�ģ���ʹ�����^����Ҫ�C�ϸ��������Ϣ�������Լ����Д࣬߀�о����փԵ���Ҫ�ԣ��@��һ��(g��)˼�����}���l(f��)�F(xi��n)���}����Q���}���^�̣��ܿ�����ǽY(ji��)���Ǻ���ģ�����������һ����(sh��)�W(xu��)�}��߀���Ǿ�Ԓ����ʹһС����Ҳ���¸߶�
����Դ�a��
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit p0_0=P0^0;
sbit p0_7=P0^7;
sbit p1_7=P0^7;
sbit EN1=P1^2;//m1�}�_ݔ��
sbit EN2=P1^5;//m2�}�_ݔ��
//*****************************
sbit HW1=P2^0;//�ӽ�
sbit HW2=P2^1;//�p�I m1
//***************************
sbit p2_2=P2^2;
sbit p2_3=P2^3;
// m2
//*********************
sbit p1_3=P1^3;
sbit p1_4=P1^4; //M2�D(zhu��n)��M��
//******************************
sbit p1_1=P1^1;
sbit p1_0=P1^0; //M1�D(zhu��n)��M��
//*****M1***********************************************
uint t=100; //�d������
uint time0; // ���ƽ�ɰ��I�{(di��o)���� ���@���� �����ں͵��ƽ�O(sh��)��һ��(g��)�dz����(n��i)���{(di��o)��һ��(g��)�dz�������{(di��o)�����ƽ�����ģ�Ҳ���Է�֮��һ�ӵ�
uint time1; // ���c(di��n)ƽ����(zh��n)��
uint timeing0;//�������ƽ��(d��ng)�B(t��i)׃��
uint timeing1; //�������ƽ��(d��ng)�B(t��i)׃��
//*****M2****************
//uint t=500; //�d������
uint time_0; // ���ƽ�ɰ��I�{(di��o)���� ���@���� �����ں͵��ƽ�O(sh��)��һ��(g��)�dz����(n��i)���{(di��o)��һ��(g��)�dz�������{(di��o)�����ƽ�����ģ�Ҳ���Է�֮��һ�ӵ�
uint time_1; // ���c(di��n)ƽ����(zh��n)��
uint timeing_0;//�������ƽ��(d��ng)�B(t��i)׃��
uint timeing_1; //�������ƽ��(d��ng)�B(t��i)׃��
//********���������g׃�����x****************************
uchar middate,middate1,middate2;
//********************************
//void delay(uint z) //�ӕr(sh��)1ms����
//{
//uint x,a,b;
// for (x=0;x<z;x++)
//
// {
// for(b=120;b>0;b--)
// {
// for(a=3;a>0;a--);
//
// }
// }
//
// }
void stop() //ֹͣ����(sh��) ֹͣ HW1=HW2=0;
{
EA=0; //��ֹ�Д�
EN1=0;
EN2=0;
}
void goon()// ֱ���� HW1=1=HW2;
{
EA=1;
time0=50;
time_0=50;
time1=50;
time_1=50;
}
void left()//�����D(zhu��n)�� HW1=1;HW2=0; �Ķ��r(sh��)��(sh��)��(j��)����(sh��)�F(xi��n)��(sh��)�r(sh��)PWM�{(di��o)��
{
EA=1;
//***************
time_0=50;
time_1=50; // //ͨ�^�{(di��o)����݆���D(zhu��n)�ف��{(di��o)���D(zhu��n)�����ȣ��@��Ҫ��ς�������(sh��)�r(sh��)�ɼ�����
time0=(time0-1);
time1=(t-time0);
//***********************
timeing0=0;
timeing1=0;
}
void right()//�����D(zhu��n)�� HW1=0;HW2=1;
{
EA=1;
//***************
time0=50;
time1=50; //ͨ�^�{(di��o)����݆���D(zhu��n)�ف��{(di��o)���D(zhu��n)�����ȣ��@��Ҫ��ς�������(sh��)�r(sh��)�ɼ�����
time_0=(time_0-1);
time_1=(t-time_0);
//******************
timeing_0=0;
timeing_1=0; //̫�P(gu��n)�I�ˣ��@һ������?y��n)鲻�ӵ�Ԓ���?d��ng)��һ�ε�time0���ĕr(sh��)timeing0,��timeing1����0
// ���Բŕ�(hu��)�l(f��)���e(cu��)�`�����F(xi��n)�鲨�Εr(sh��)���r(sh��)�m(x��)�������м��h�}�_���@���Ǜ]����ˢ��TIME0��ͬ�r(sh��)ˢ��tineing�ĺ��
// �]�뵽�ܺ��ε�һ�c(di��n)�¾����c(di��n)ᄳ�PWM�����������������н�Ӗ(x��n)��
// 2010��10��7����8:34���c����_�l(f��)�^(q��)�����(xi��ng)Ŀ������1
}
void InitTimer0(void) //10us ���r(sh��)����ʼ���O(sh��)�ú���(sh��)
{
TMOD = 0x01;
TH0 =0xff;
TL0 =0xf7;
EA = 1;
ET0 = 1;
TR0 = 1;
}
void main(void)//������(sh��)
{ P2=0x0f;
InitTimer0(); //10 us����׃��������(j��)��ͬ�ľ���(zh��n)�Ⱥ��l��Ҫ��
//************
p1_0=0;
p1_1=1; //M2
//�Q���D(zhu��n)��
p1_3=1;
p1_4=0; //M1
//************
time0=50; //**************************************************************************************************************//
time1=50; // //
time_0=50; // //
time_1=50; // ֪ͨ //
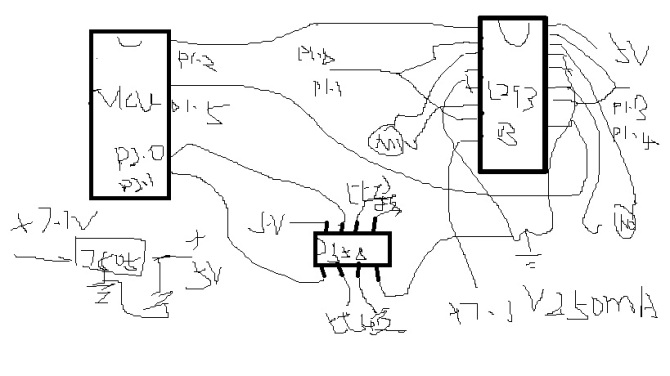
// L293B��8�_��Ҫ��>5V�ģ�16�_Ҫ��5V�����DŽe�˵IJ����@�ӵģ����ǿ����փԣ���ʧ�����@������ // //
// �@��������������1000us�ĵ����ҵĶ��r(sh��)����10usһ�ε��������@��ȡt=100����ʾ�Ұ����ڷֳ�100�� //
// ռ�ձȣ�q��=���ƽ(time1)/����(t)���ʶ�time1/100=ռ�ձȣ� //
// 늉�(u)=ռ�ձ�*���늉���Um���ʶ��ҵ�ݔ��늉�����(sh��)�飺U0=Um*q =time1/100*5V(�@�����õ���5v늉�=Um) //
// ����(j��)������ʽ�������MCUݔ��늉������磺��Ҫݔ��1.5V늉�ֻҪtime1=30���ɣ���(d��ng)Ȼtime0=70(���C�l�ʲ�׃) //
// ��Ҫݔ��3VֻҪtime1=60,tim0=40;���� �ǺǺǺ� //
// ����@Ҳ���ǔ�(sh��)ģ�D(zhu��n)�Q��ԭ���� //
// //
// 2010��10��24�������c�������(xi��ng)Ŀ������ //
//**************************************************************************************************************//
while(1) //��ѭ�h(hu��n)
{
//***********************
middate=0x00;
middate1=0x00;
middate2=0x00;
middate1=HW1; //��������̖(h��o)�ɼ���̎��
middate2=HW2;
CY=0;
middate2=(middate2<<1) ;
middate=(middate1+middate2) ;
// ****************************
switch(middate) //�D(zhu��n)���P(gu��n)�I������(sh��)
{
case 3:{stop();break; }//ֹͣ>>>>>>>>>>>>>>HW1=0=HW2;
case 1:{left();break; }//���D(zhu��n)>>>>>>>>>>>>>>HW1=1;HW2=0;
case 2:{right();break; }//���D(zhu��n)>>>>>>>>>>>>>>HW1=0;HW2=1;
case 0:{goon();break; }//ֱ��>>>>>>>>>>>>>>HW1=1=HW2;
}
}
}
void Timer0Interrupt(void) interrupt 1 //���r(sh��)���Дຯ��(sh��)����PWM���ӿچ�Ԫ�飺time0��PWM1̖(h��o)���ƽ�r(sh��)�g��,time1��PWM1̖(h��o)���ƽ�r(sh��)�g��,time_0��PWM2̖(h��o)���ƽ�r(sh��)�g��,time_1��PWM2̖(h��o)���ƽ�r(sh��)�g�� ��t�����ڣ�
{ // MCU:P1.2�ǵ�һ·PWM��P1.5�ǵڶ�·PWM
if(time0==timeing0)
{
if(time1!=timeing1)
{ //���ƽ�r(sh��)�g��
TH0 =0xff;
TL0 =0xf7;
EN1=1;
timeing1++;
}
//�Д��Ӻ���(sh��)�����r(sh��)�������ģ�
}
else
if(time0!=timeing0)
{
TH0 =0xff;
TL0 =0xf7;
EN1=0; //���ƽ�r(sh��)�g��
timeing0++;
}
if(time0==timeing0)
{
if(time1==timeing1)
{
timeing0=0;
timeing1=0;
}
}
//****************M2��************************************************************************************************************************************************************
if(time_0==timeing_0)
{
if(time_1!=timeing_1)
{ //���ƽ�r(sh��)�g��
TH0 =0xff;
TL0 =0xf7;
EN2=1;
timeing_1++;
}
//�Д��Ӻ���(sh��)�����r(sh��)�������ģ�
}
else
if(time_0!=timeing_0)
{
TH0 =0xff;
TL0 =0xf7;
EN2=0; //���ƽ�r(sh��)�g��
timeing_0++;
}
if(time_0==timeing_0)
{
if(time_1==timeing_1)
{
timeing_0=0;
timeing_1=0;
}
}
}
��(f��)�ƴ��a
����:
sdbzwhh
�r(sh��)�g:
2017-1-11 21:04
�D�����ҽo�M��
����:
������96
�r(sh��)�g:
2017-5-15 10:18
�����õ�����Щ������
����:
�����
�r(sh��)�g:
2017-5-16 20:44
������ĈD��߀�Ԟ����njW(xu��)������
����:
c.x.d
�r(sh��)�g:
2017-5-16 21:14
�W(xu��)��(x��) �W(xu��)��(x��)
����:
cd88361417
�r(sh��)�g:
2017-8-15 18:25
�W(xu��)��(x��) �W(xu��)��(x��)
����:
binyv
�r(sh��)�g:
2018-9-27 23:12
������˼·�ܺã�ֵ�Å���
�gӭ���R (http://m.raoushi.com/bbs/)
Powered by Discuz! X3.1