ϵ�y(t��ng)�Ľ�ģ�c����
3.1��ģ����
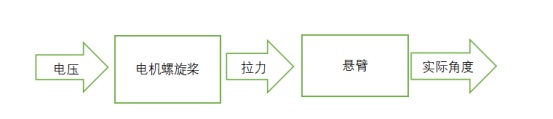
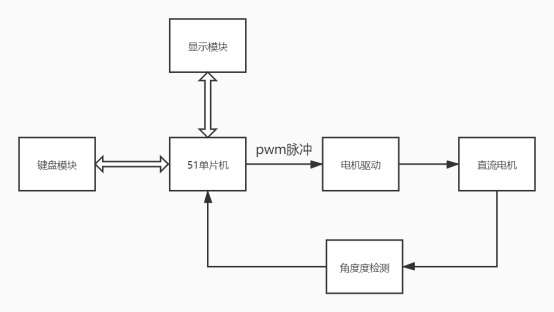
늙C�������ұۘ�(g��u)����һ�M����һ���|(zh��)���ęCеϵ�y(t��ng)���܉��������������£��@���������D(zhu��n)�ӣ���Dһ��ʾ�����˺������������ԑұ��|(zh��)��������Ħ�������O(sh��)l��ұ��L�ȣ�m늙C�|(zh��)����![]() �ұ۽Ƕȣ�f��������������u늙C늉���
�ұ۽Ƕȣ�f��������������u늙C늉���

�Dһ ��������
�D�� 늙C�������ұ�ϵ�y(t��ng)����ԭ��
�Ƕȣ����xˮƽ�������ȣ���rᘷ����������
�����c���ұ��ܵ������������������Ĺ�ͬ���á������c늙C늉�![]() ���P(gu��n)��ʼ�K��ֱ�ڑұ��c�\�ӷ����������\�ӷ����ϵķ�����
���P(gu��n)��ʼ�K��ֱ�ڑұ��c�\�ӷ����������\�ӷ����ϵķ�����![]() ����ʩ��ij��늉�
����ʩ��ij��늉�![]() �������a(ch��n)������
�������a(ch��n)������![]() ��ʹ�ұ۷�(w��n)��ͣ����ij��λ�ã��t�˕r
��ʹ�ұ۷�(w��n)��ͣ����ij��λ�ã��t�˕r![]() ���@�r�͘�(g��u)����һ�������c
���@�r�͘�(g��u)����һ�������c![]() ��
��
3.1.1늙C������ģ��
�o늙Cʩ��늉�u��늙C�������������D(zhu��n)�a(ch��n)������f����֪늙C늉����D(zhu��n)�ٵĺ�����(sh��)�Wģ�͞�һ�A�����ַ��̡�
![]() ��1��
��1��
����T��r�g����(sh��)��������ϵ�y(t��ng)��푑�(y��ng)�ٶȿ�����K��ϵ�y(t��ng)��(w��n)�B(t��i)���棬�����ˮ��D(zhu��n)�ٷ�(w��n)����׃�r��늉����D(zhu��n)�ٳ����ȡ�
늙C늉����D(zhu��n)��֮�g�Ă��f����(sh��)��ʽ��1����֪��
![]() ��2��
��2��
�@����O(sh��)�ڹ����c����������������늙C�D(zhu��n)�ٳ����ȣ�Kf�DZ���ϵ��(sh��)����ô������늉��Ă��f����(sh��)���Եõ�
![]() ��3��
��3��
3.1.2�ұ�ϵ�y(t��ng)��(sh��)�Wģ��
�о������ϵ��\�ӷ�����ţ�D�ڶ����ɿɵ�
![]() ��4��
��4��
���У�b����Ħ�������������д����y�Է����ķǾ����![]() �������҂�����ʹ��Сƫ�������ij���ض��Ĺ����c�����M�о��Ի������Ȍ������D(zhu��n)�DZ��_�鹤���c������������ʽ��
�������҂�����ʹ��Сƫ�������ij���ض��Ĺ����c�����M�о��Ի������Ȍ������D(zhu��n)�DZ��_�鹤���c������������ʽ��![]() ��
��![]() ������ʽ�õ�
������ʽ�õ�
���Ǿ����![]() �ڹ����c
�ڹ����c![]() ̎ʹ��һ�A̩�ռ���(sh��)չ�_�M�оֲ����Ի�
̎ʹ��һ�A̩�ռ���(sh��)չ�_�M�оֲ����Ի�
��ʽ��7������ʽ��6���������]�� ![]() ���õ����ƺ�ľ��Է���
���õ����ƺ�ľ��Է���
���˺������_��ȥ������̖���������˜���ʽ
���f����(sh��)
3.1.3늙C�������ұ�ϵ�y(t��ng)��(sh��)�Wģ��
늙C�������ұۿ��Կ���һ�����w���t�ϲ�ʽ��3����10������ȥ���g׃��F(s)���õ�ָ��늉��͑ұی��H�ǶȵĂ��f����(sh��)��
���ұ�λ��ˮƽ���·��r��![]() ��
��![]() ���t
���t![]() ��һ������(sh��)���˕r��ĸ���ʽ��]��ؓϵ��(sh��)��
��һ������(sh��)���˕r��ĸ���ʽ��]��ؓϵ��(sh��)��
�ұ�ϵ�y(t��ng)�����Aϵ�y(t��ng)����3���O�c![]() ��
��![]() ��
��![]() �����늙C�ķ���(y��ng)�ٶȷdz��죬�h���ڑұ۵ķ���(y��ng)�ٶȣ�Ҳ�����f����(y��ng)�ĘO�c�h�x̓�S�������ɂ��O�c�������O�c���t���Ժ�����2�Aϵ�y(t��ng)��
�����늙C�ķ���(y��ng)�ٶȷdz��죬�h���ڑұ۵ķ���(y��ng)�ٶȣ�Ҳ�����f����(y��ng)�ĘO�c�h�x̓�S�������ɂ��O�c�������O�c���t���Ժ�����2�Aϵ�y(t��ng)��
3.2 PID �����Լ�MATLAB����
���������܉����ϵ�y(t��ng)푑�(y��ng)�ٶȣ��pС��(w��n)�B(t��i)�`����Ƿ�(w��n)���Ԝp������ʎ�ӄ�����������ֿ���������ʎ���Ʒ�(w��n)���ԡ����ϣ�����緀(w��n)�B(t��i)�`�����Ҫ����e�֭h(hu��n)��(ji��)���ϵ�y(t��ng)��(w��n)���ԡ�

����D
![]()
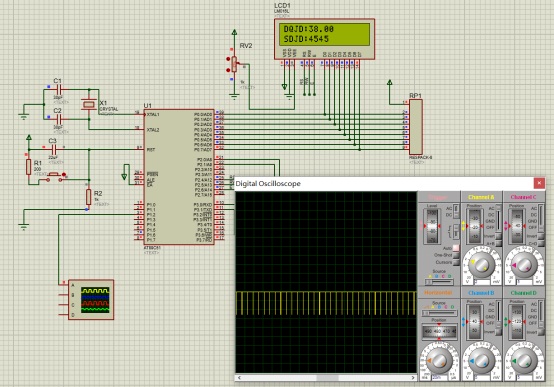
����simulink���M�з�������鿴P��PD��PI��PID�������Ŀ���Ч��
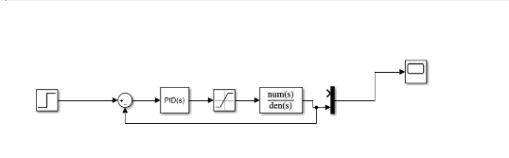
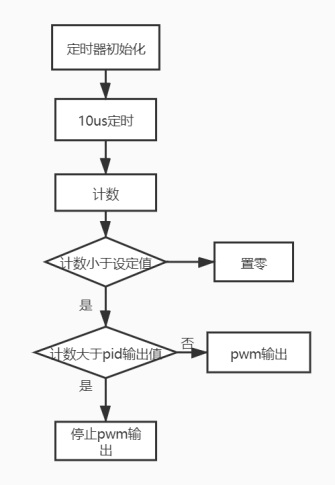
�Dһ ����ԭ��
�f�����Dһ�����ϵ�y(t��ng)��simulink����ģ�͡�
PID �����ǹ��I(y��)���ƌ��`���Ҋ�Ŀ����㷨��95%���ϣ����������ɱ�����Ԫ��P�� proportional�����e�ֆ�Ԫ��I��integral�����ֆ�Ԫ��Dderivative���M�ɣ����� Kp��Ki �� Kd ������Ҫ�O(sh��)����ϵ��(sh��)������ԭ����D 2��ʾ���ַ��̼����f����(sh��)����ʽ��ʾ��
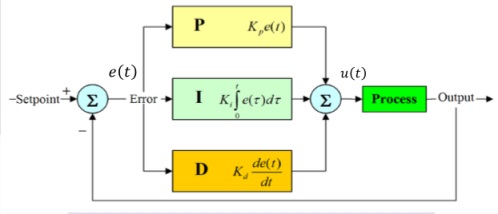
PID����ԭ��D
![]()
![]()
PID �������ı������e�ֺ������÷քe����(y��ng)��ǰ�`��^ȥ��Ӌ�`��`��׃���ٶȣ�δ���`������Dz�֪���ܿ�ϵ�y(t��ng)�����ԣ�һ���J�� PID �����������m�õĿ����������� �{(di��o)�� PID ����������������(sh��)�������{(di��o)������ϵ�y(t��ng)���O(sh��)���M���O(sh��)Ӌ����������푑�(y��ng)������ ���������`��ķ���(y��ng)���������������{(di��o)�̶ȼ�ϵ�y(t��ng)��ʎ�ij̶ȡ���(w��n)�B(t��i)�`���С����ʾ�� ����(j��)���w��(y��ng)�È��Ͽ���ʹ��PID ���Ƶĸ��N�M�ϣ���P���ơ�PI���ơ�PD���Ƶȡ�������PI������ã�I �����܉�������(w��n)�B(t��i)�`�D ���ƌ�������̖��ʮ�����У���Ҫ����
�O(sh��)Ӌ��
�������e�֡����㷨�ڛ]��Ӌ��C�������ʹ��ģ�M�����팍�F(xi��n)�ġ��F(xi��n)�����I(y��)���ձ� ʹ�Ô�(sh��)��Ӌ��C���F(xi��n)��Ӌ��C�Թ̶��r�g�g��????������؏��\�� PID �����㷨���� k �εı� �������????(??)���ֿ����????(??)���e�ֿ����????(??)�քe����![]()
![]()
![]()
![]()
Ȼ�� �ϳɿ������Ŀ�ݔ��![]()
![]()
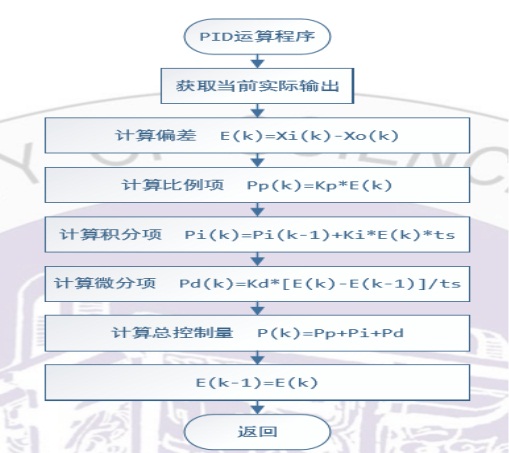
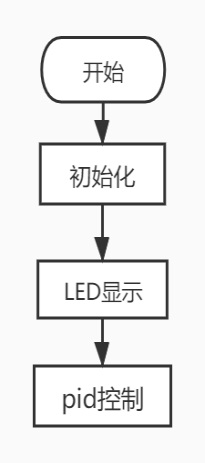
PID�㷨���̈D
1. �ֿ��ƌ����l�_��ʮ�����У���Ҫ�O(sh��)�����ƣ�
2. �e�ֿ��ƴ��ڷe��͆��}��������Ч��Ӱ��^����Ҫ��Q��
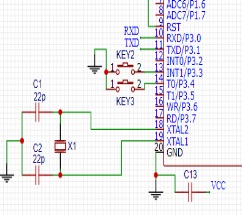
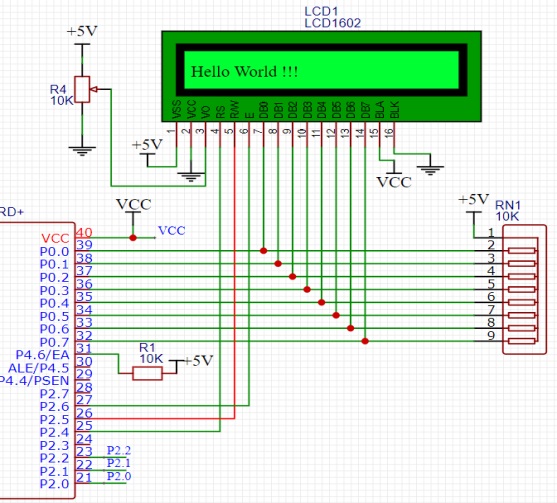
4ϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ��ܛ������
4.1�·�O(sh��)Ӌ
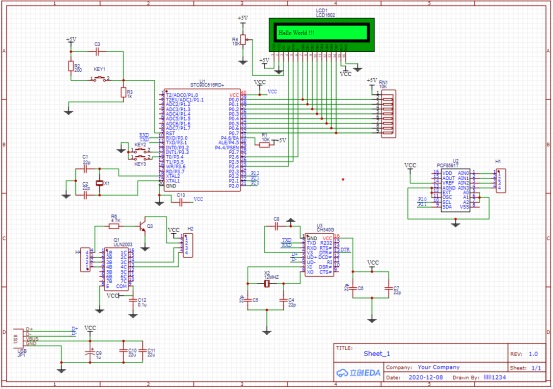
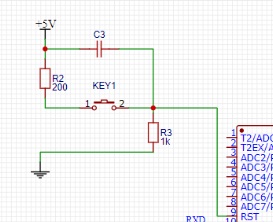 ���·�D
���·�D
�ֲ��·�D1�����_�P(gu��n)�� �ֲ��·�D2������

�ֲ��·�D3��USB�x��ģ�K��
�ֲ��·�D4��LED�@ʾ��ģ�K��
�ֲ��·�D5��USB�D(zhu��n)����ģ�K�� �ֲ��·�D6��ad�D(zhu��n)�Qģ�K��
�ֲ��·�D6��늙C�(q��)��ģ�Kģ�K��
�f��������89C51��Ƭ�C�팍�F(xi��n)��ֱ��늙C��PID�����Լ����r��B(t��i)��(sh��)��(j��)���@ʾ��
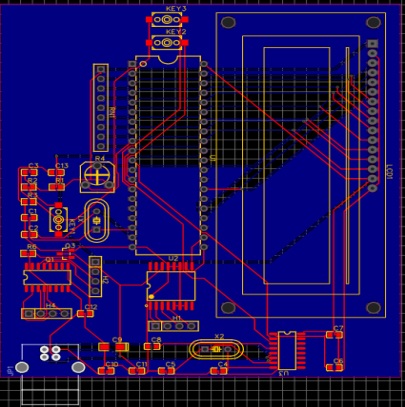 4.1.3 PCB�·�D
4.1.3 PCB�·�D
PCB�D
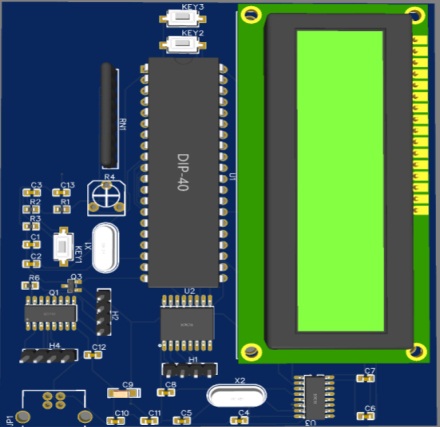
PCB���S�D
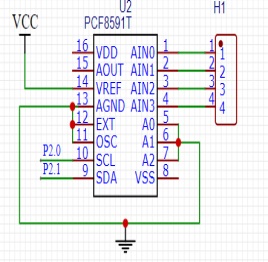
�f������������A������
��Ƭ�CSTC90C516RD+��1��
PCF8591T ad�D(zhu��n)�QоƬ������1��
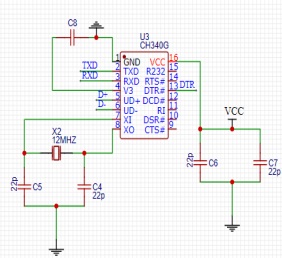
CH340G USB�D(zhu��n)����оƬ������1��
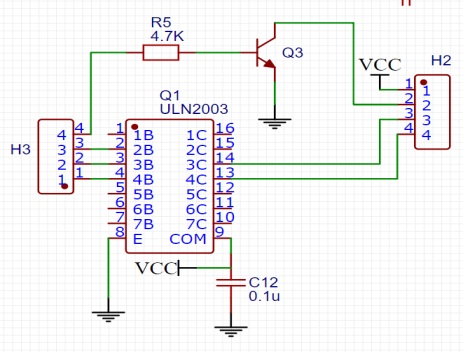
ULN2003늙C�(q��)��оƬ������1��
LED�@ʾ��LCM1602K-NSW-BBW������1��
Micro USB�B����������1��
�_�P(gu��n)K2-1107ST-A4SW-06������3��
���X6511WV-04H-C30D60������3��
����X49SD27MSD2SC������2��
���O��2n3904S-RTK/PS������1��
��裺10K��������2����200��������1����4.7K������1����10K����׃���VZ067TL1B103������1����10K����C26615������1��
��ݣ�10u������1����22p������6����104������2����0.1u������1��22u������2��늻��W���1u������1��
ԭ��D
�f����
�҂���51��Ƭ�Cȥ����늙C�D(zhu��n)��ָ���Ƕȣ���ͨ�^lcd�@ʾ����
ϵ�y(t��ng)�ľC�Ϝyԇ���u��
������P������
����������ݔ���cƫ��ɱ����r���Q֮��������ƣ�proportional control������ ![]()
ϵ�y(t��ng)�]�h(hu��n)���f����(sh��)�� ![]()
![]()
���ýKֵ������Æ�λ�A�S푑�(y��ng)�ķ�(w��n)�B(t��i)ֵ
![]()
������֪ ��늙C��ָ��늉�������늙C�D(zhu��n)�٣�������������������ζ���������`����� �ȡ���ˣ� 1) �������Ʊ�Ȼ�����`��`���Ǯa(ch��n)��������ԴȪ���]���`��͛]��������Ҫ�S��һ ����������????Խ��������`���ԽС�� 2) ������������ݔ��ֻ���`������ȣ�????Խ����������(y��ng)Խ�`�������ұۿ��ٛ_�� ָ��λ�Õr���`��� 0������Ҳ�� 0�����ٶȞ� 0���mȻ�ұ۵ļ��ٶȞ� 0�������� ߀������һ���ٶȣ��a(ch��n)���^�_��
�DһP���Ƶ���Փ����
ͨ�^����҂��l(f��)�F(xi��n)Kp�^��r���ӿ�푑�(y��ng)�ٶȿ����_����(w��n)�����ܜp���`����������`�KpԽ��r��������������ʎ��Kp�pС���l(f��)����ʎ�Ŀ����ԜpС�����{(di��o)��(ji��)�ٶ�׃����
�����֣�PD������
һ������ϵ�y(t��ng)�Ļ���Ҫ���Ƿ�(w��n)�����ʴ_�����١����ӱ�������ϵ��(sh��)�܉�pСƫ����ߜ� �_�ԡ��pС����(y��ng)�r�g��߿����ԡ�����ͬ�r�����Ć��}����ϵ�y(t��ng)��(w��n)���Ԝp�������F(xi��n)�������^ �_���a(ch��n)����ʎ�� ��������ݔ�����H��ƫ��ɱ�����ͬ�r߀�cƫ���׃���ٶȣ��֣��ɱ����r���Q֮�� �����ֿ��ƣ�Proportional + Derivative control����
���� ![]()
����(y��ng)���f����(sh��)��![]()
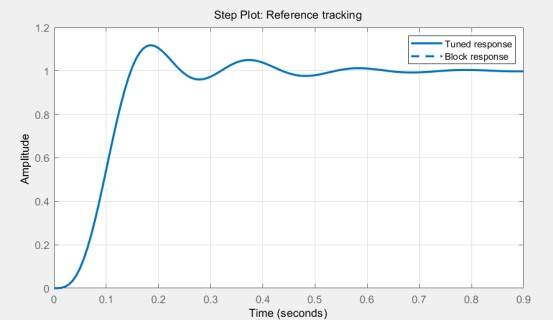
PD�����еı�����܉�pСƫ�����܉�pСƫ���׃���ٶȡ�������ʎ��PD���Ʒ���D���D��ʾ��

����ұ��܉���˜ʶ��Aϵ�y(t��ng)![]() ���t PD ���Ƶ��]�h(hu��n)���f����(sh��)��
���t PD ���Ƶ��]�h(hu��n)���f����(sh��)��
![]()
����Փ�Ϸ��������� Kd����������ȣ�������ʎ���μ��ı�������������Kp �܉�pС�`�����푑�(y��ng)�ٶȣ����Ǖ����ӳ��{(di��o)��������(w��n)���ԡ��a(ch��n)�����{(di��o)��ԭ��ǰ���ѽ�(j��ng)��Ҫ�f���^��ԭ���Ǯ�ƫ���0�r��ƫ����ٶȲ���0���@�r�����ֿ������ÿ�������ƫ���׃����������r��ƫ���0�r��ƫ����ٶ�Ҳ�� 0���_����(w��n)����B(t��i)��
�D��pd������Փ푑�(y��ng)����
��(j��ng)�^�{(di��o)��(ji��)�҂��l(f��)�F(xi��n)��Փ�͌��H��һЩ���Ǻ��҂��J�����ڬF(xi��n)��ϵ�y(t��ng)��ϵ�y(t��ng)푑�(y��ng)�ٶ�����ʹ�֭h(hu��n)��(ji��)�����������ֿ��ƿ��Ը��ƄӑB(t��i)����,�糬�{(di��o)���p��,�{(di��o)��(ji��)�r�g�s��,���S�Ӵ��������,ʹ�o��pС,��߿��ƾ��ȡ�����Kdƫ���ƫС�r,���{(di��o)���^��,�{(di��o)��(ji��)�r�g�^�L,ֻ�к�Ԓ�ĕr��,�ſ��Եõ����^�M����^���^�̡�
�����e�֣�PI������
�ڷe�ֿ����У���������ݔ���cݔ���`����̖�ķe�ֳ������P(gu��n)ϵ����һ���Ԅӿ���ϵ�y(t��ng)��������M�뷀(w��n)�B(t��i)����ڷ�(w��n)�B(t��i)�`��t�Q�@������ϵ�y(t��ng)���з�(w��n)�B(t��i)�`��ĻQ�в�ϵ�y(t��ng)��System with Steady-state Error��������������(w��n)�B(t��i)�`��ڿ������б�����롰�e��헡����e��헌��`��ȡ�Q�ڕr�g�ķe�֣��S���r�g�����ӣ��e��헕������@�ӣ������`���С���e���Ҳ���S���r�g�����Ӷ��Ӵ����Ƅӿ�������ݔ������ʹ��(w��n)�B(t��i)�`���Mһ���pС��ֱ�������㡣��ˣ�����+�e��(PI)������������ʹϵ�y(t��ng)���M�뷀(w��n)�B(t��i)��o��(w��n)�B(t��i)�`��e���{(di��o)��(ji��)���ã���ʹϵ�y(t��ng)������(w��n)�B(t��i)�`��,��ߟo��ȡ�������`��,�e���{(di��o)��(ji��)���M��,ֱ���o��,�e���{(di��o)��(ji��)ֹͣ,�e���{(di��o)��(ji��)ݔ��һ��ֵ���e�����õď���ȡ�Q�c�e�֕r�g����(sh��)Ti, TiԽС,�e�����þ�Խ������֮Ti��t�e��������,����e���{(di��o)��(ji��)��ʹϵ�y(t��ng)��(w��n)�����½�,�ӑB(t��i)푑�(y��ng)׃�����e�����ó��c��ɷN�{(di��o)��(ji��)Ҏ(gu��)�ɽY(ji��)��,�M��PI�{(di��o)��(ji��)����
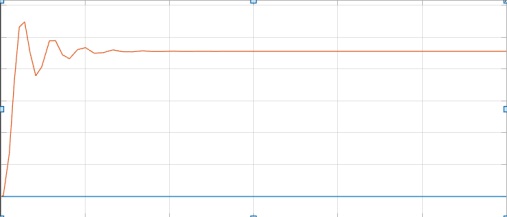
�D�� kp0.018 ki0.58��Փ푑�(y��ng)����
�ĈD�Ќ��ȿ��l(f��)�F(xi��n)�e�֭h(hu��n)��(ji��)�������ǣ�ֻҪϵ�y(t��ng)�����`��e�ֿ������þͲ���طe�ۣ�ݔ���������������`����ֻҪ�����ĕr�g���e�ֿ��ƌ�����ȫ�����`����Ƿe������̫����ʹϵ�y(t��ng)���{(di��o)�Ӵ�����ʹϵ�y(t��ng)���F(xi��n)��ʎ��
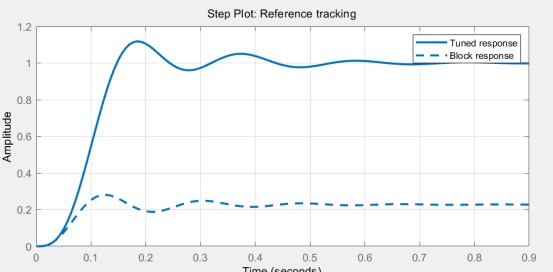
�D�� kp=0.5 ki=0.6 kd=0.15푑�(y��ng)����
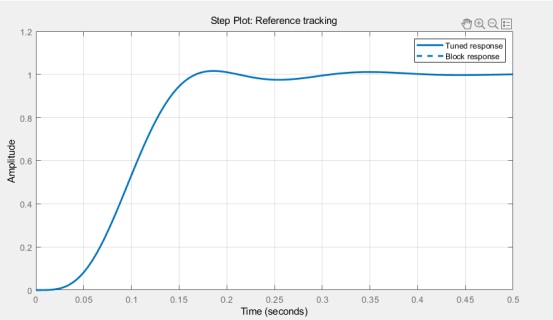
�D�� kp=0.5 ki=0.6 kd=0.15푑�(y��ng)������Փ푑�(y��ng)����
�҂��l(f��)�F(xi��n)PID���ƿ����^�õ،��F(xi��n)ϵ�y(t��ng)��(w��n)��ͨ�^PID�㷨�ĽM�Ͽ���Ч�ؼm�������ƌ����ƫ��Ķ�ʹ���_��һ����(w��n)���Ġ�B(t��i)�������Hϵ�y(t��ng)����Փϵ�y(t��ng)�����ڲ���o���_����Ҫ����Փ��B(t��i)���҂��ڌ��H�аl(f��)�F(xi��n)ԓ�Mpid���ԺܺõĿ��Ƒұ�ϵ�y(t��ng)����x��ԓ�Mpid����(sh��)��
���@���O(sh��)Ӌ���҂����Ȍ��Ŀ�ֳ������֣���һ����ͨ�^51��Ƭ�C���Ƕ��x�����ڶ������F(xi��n)���I�ܸ�׃�O(sh��)���Ƕȣ����������F(xi��n)����ͨ�^pid������������ͣ���ض��Ƕȡ�
�ڌ��F(xi��n)�Ŀ�^�����҂�������һЩ���y����ͨ�^�M�T��һ��Ŭ����Q���}��
��1�����xȡ�λ���ǶȲ������@ʾ��LCD�ϕr���҂��l(f��)�F(xi��n)�λ���x���Ĕ�(sh��)��(j��)�����ܼ��r�@ʾ��LCD�ϣ��к��L���ӕr���҂�ͨ�^����Y�Ϻ���ԃ�ώ���K�l(f��)�F(xi��n)���҂��Ď캯��(sh��)������^�L�r�g�ӕr�Ķ�����(sh��)��(j��)���ܱ����r�@ʾ���҂��hȥ���ӕr���l(f��)�F(xi��n)�Ƕȿ��Ժܺ��@ʾ��LCD�ϡ�
��2�����{(di��o)ԇ����r�҂��l(f��)�F(xi��n)�xȡ�ĽǶȺ��O(sh��)���ĽǶȲ�����һ���@ʾ��LCD�ϣ��҂����Լ��������@ʾ����(sh��)���b�ɺ���(sh��)�������@ʾ��ǰ�ǶȵĴ��a�����O(sh��)���Ƕȴ��a���棬ͨ�^�@�ӵ��{(di��o)ԇ�҂���LCD���Ժܺ��@ʾ��
��3����pid���ƕr�҂��l(f��)�F(xi��n)��Ƭ�C�mȻ���Ԍ��F(xi��n)��늙C���Ƶ��Dz������ں͕r�g���ܴ�(j��ng)�^����Y�Ϻ�ӑՓ�҂��l(f��)�F(xi��n)��(y��ng)ԓ�Ƕ��r���Д��r�g��pwm���ڴ��چ��}����(j��ng)�^ԇ��҂��Ѷ��r���Д��r�g�O(sh��)����10�룬pwm���ڞ�1���룬
�@�r��늙C���ԺܺõĿ��ơ�
��4�����{(di��o)ԇ�^�����҂��l(f��)�F(xi��n)�������mȻ�����D(zhu��n)��ָ���Ƕȵ���ֻ���S��һ���ĕr�g�������L�r�g�S����ָ���Ƕȣ��҂���(j��ng)�^ӑՓ���Ͳ���Y���J����pid��Ӌ����چ��}���҂������O(sh��)Ӌ��pid��Ӌ�㷽������K��Q���@Щ���}��
������ϵ�y(t��ng)�{(di��o)ԇ�^�����҂�
��5����������һ�������`��`���Ǯa(ch��n)��������ԴȪ���]���`��͛]��������������������ݔ��ֻ���`������ȣ��������Ʈ����ٵ�ָ��λ�Õr�����l(f��)���^�_��
�ñ����ֿ��ƕr��PD�����еı�����܉�pСƫ�����܉�pСƫ���׃���ٶȡ�������ʎ���ֿ��ƿ��Ը��ƄӑB(t��i)����,�糬�{(di��o)���p��,�{(di��o)��(ji��)�r�g�s��,���S�Ӵ��������,ʹ�o��pС,��߿��ƾ��ȡ�����Kdƫ���ƫС�r,���{(di��o)���^��,�{(di��o)��(ji��)�r�g�^�L,ֻ�к�Ԓ�ĕr��,�ſ��Եõ����^�M����^���^�̡�
����+�e��(PI)���������e�֭h(hu��n)��(ji��)����ʹϵ�y(t��ng)���M�뷀(w��n)�B(t��i)��o��(w��n)�B(t��i)�`�����`��ȡ�
PID���ƿ����^�õ،��F(xi��n)ϵ�y(t��ng)��(w��n)��ͨ�^PID�㷨�ĽM�Ͽ���Ч�ؼm�������ƌ����ƫ��Ķ�ʹ���_��һ����(w��n)���Ġ�B(t��i)��
��6���·�D���L����������w�·�D����Ϥ��������Proteus�з���ʧ��������l(f��)�F(xi��n)��Ӳ����̖��������ͬ��̖��Ҏ(gu��)�������Լ����O�܌��·��Ӱ푕��۷e���������ĽY(ji��)���`��O������ڶ�θ��Q�{(di��o)ԇ����Խ�Q��
��7��PCB����L�����_ʼ��AD���L�ƣ������NԪ����߀��Ҫ���d�O�䲻���㣬�������M�˺ܶ��r�g������ԭ��Ҳ�nj�ܛ���IJ���Ϥ��֮���õ�eda�ھ��L�D���M�Ⱦͼӿ��˺ܶ࣬����(y��ng)��Ԫ����Ҳ�ܿ�Ҋ����D�Լ�����(y��ng)���b���܉�?q��)�Ԫ���и���̵�ӡ��?/font>
| �gӭ���R (http://m.raoushi.com/bbs/) | Powered by Discuz! X3.1 |