
USART�ĸ���
2.1.1 ʲô��USART��USART�����ã�
USART��ͨ��ͬ�������հl(f��)����
USART�����ã��܉��`����c�ⲿ�O(sh��)���M��ȫ�p����(sh��)��(j��)���Q
2.1.2 USART������
<1> ȫ�p������ͨ��
<2> �����Þ� 16 ���^�ɘӻ� 8 ���^�ɘ�
<3> С��(sh��)�����ʰl(f��)����ϵ�y(t��ng)
<4> ��(sh��)��(j��)���L�ȿɾ��̣� 8 λ�� 9 λ��
<5> ֹͣλ������ - ֧�� 1 �� 2 ��ֹͣλ
<6> �l(f��)�����ͽ��������ІΪ�ʹ��λ
<7>��ݔ�z�y��־��
�� ���վ��_�^(q��)�ѝM
�� �l(f��)�;��_�^(q��)���
�� ��ݔ�Y(ji��)����־
<8>ʮ�����И�־λ���Д�Դ��
�� CTS ׃��
�� LIN ֹͣ��̖�z�y
�� �l(f��)�͔�(sh��)��(j��)�Ĵ������
�� �l(f��)�����
�� ���Ք�(sh��)��(j��)�Ĵ����ѝM
�� ���յ���·���e
�� ����e�`
�� ���e�`
�� ���e�`
�� ��żУ��e�`
�κ�USART�p��ͨ�ž���Ҫ���كɂ����_��
���Ք�(sh��)��(j��)ݔ�����_ (RX)
�l(f��)�͔�(sh��)��(j��)���_ݔ�� (TX)
���� USART ģʽ��
�l(f��)�ͻ����ǰ���ֿ��e��·
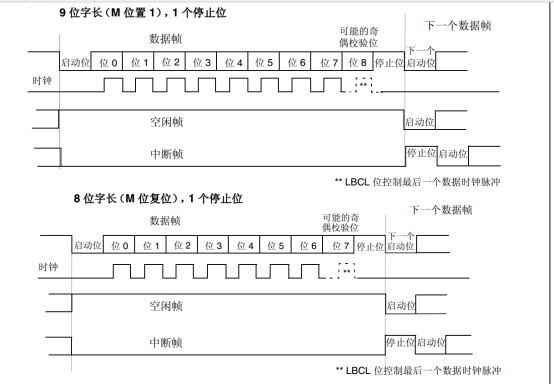
��ʼλ
��(sh��)��(j��)�����L 8 λ�� 9 λ���������Чλ��ǰ
����ָʾ����ݔ����ɵ� 0.5 ���� 1 ���� 1.5 ���� 2 ��ֹͣλ
TX���_����ʼλ�������g̎�ڵ��ƽ��B(t��i)����ֹͣλ�������g̎�ڸ��ƽ��B(t��i)��
2.2 USART�Ŀ��
2.2.1�l(f��)�͔�(sh��)��(j��)�^��
�Ŵ��ĸ������֣�
GPIO���֣�
ӳ�䲿�֣�
USART���֣�
2.2.2���Ք�(sh��)��(j��)�^��
�Ŵ��ĸ������֣�
GPIO���֣�
ӳ�䲿�֣�
USART���֣�
2.2.3 �l(f��)���c�����^�̽��x
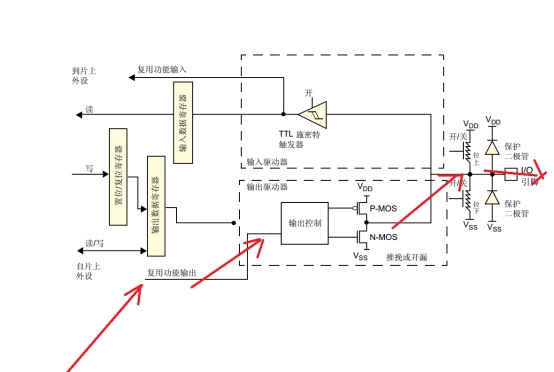
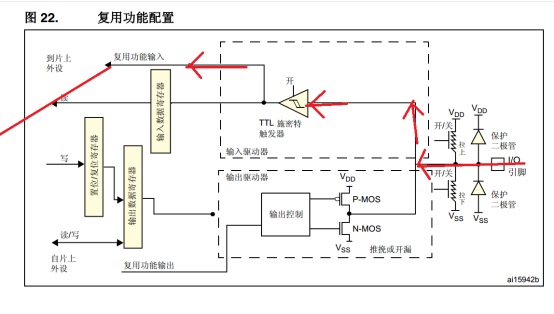
GPIOҪ����(f��)�ù���
��(f��)���cͨ�õą^(q��)�e���@������O(sh��)����USART
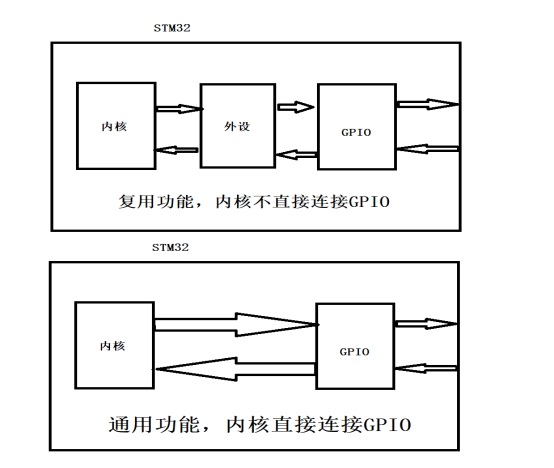
�l(f��)���^�̣�
�����^�̣�
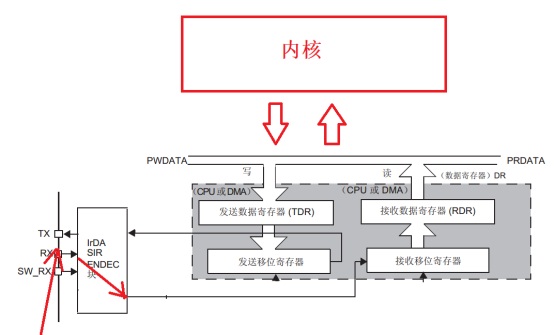
ע�⣺
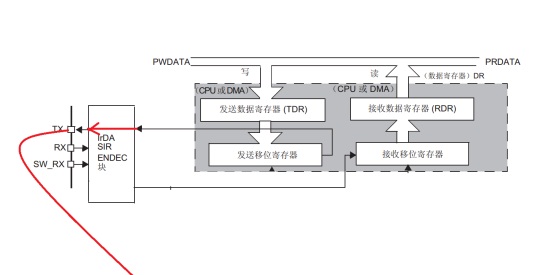
�l(f��)�͔�(sh��)��(j��)�Ĵ���(TDR)�c���Ք�(sh��)��(j��)�Ĵ���(RDR)�ǃɂ��Ĵ����������a�rֻ��DR��DR�����l(f��)�͔�(sh��)��(j��)�Ĵ���߀�ǽ��Ք�(sh��)��(j��)�Ĵ�����ȡ�Q�����ں���(sh��)�ǽ���߀�ǰl(f��)�͡�
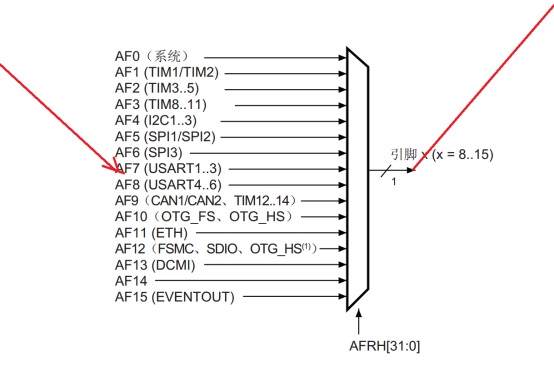
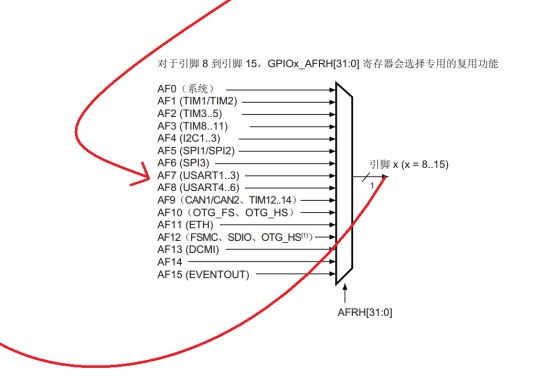
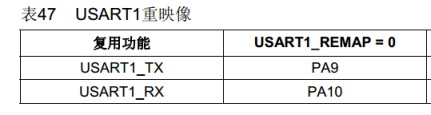
2.2.4 USARTӳ����x
�鿴ԭ��D����֪USART1�İl(f��)��TX�c����RX����(y��ng)���_�քe��PA9\PA10��
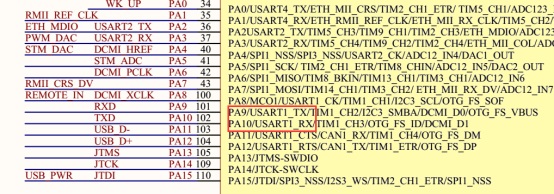
�@Ҳ��M3Ĭ�J��ӳ�����_��
�cPA9�cPA10��֪�҂��x��ď�(f��)�üĴ�����GPIOx_AFRH
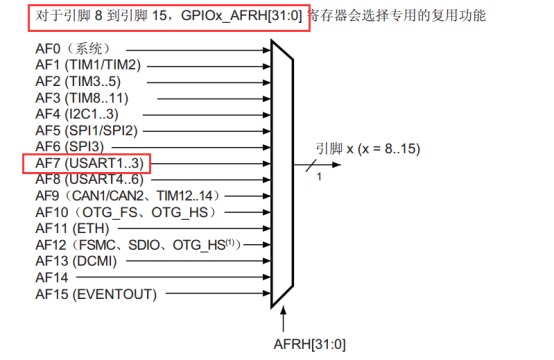
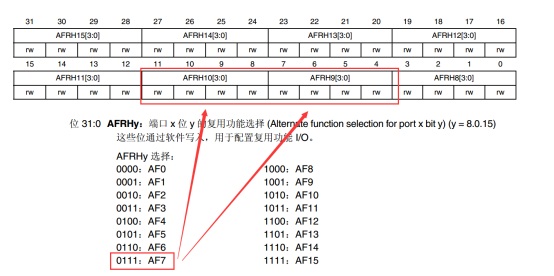
�ɈD��֪��
2.3 USART�����ʵ�����
2.3.1 ���ò����ʹ�ʽ
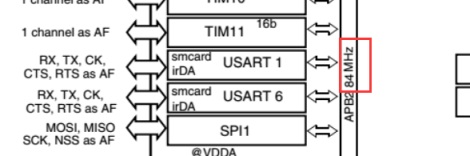
 fCK��USART���d�����O(sh��)��������֪84MHz
fCK��USART���d�����O(sh��)��������֪84MHz
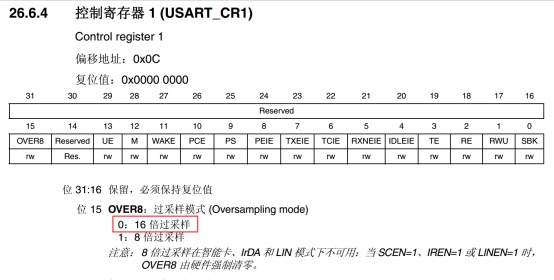
OVER8����(j��)���ƼĴ���1��λ15��֪��Ĭ�J����16���^�ɘӣ�OVER8=0
USARTDIV����(j��)���湫ʽ����ã�


2.3.2 ���H�������^��
��1���_����Ҫ���õIJ����ʡ�����Ĭ�J�^����ģʽ
��2������(j��)��ʽ1�������USARTDIV
��3��USARTDIV�nj��뵽�����ʼĴ��� (USART_BRR)�ĸ��c��(sh��)�����ڼĴ�������ֱ�ӌ��븡�c��(sh��)��������Ҫ������(sh��)��С��(sh��)���_���뵽USART_BRR�С�
��4���鿴�Ĵ���USART_BRR��֪��12λ��������(sh��)��4λ����С��(sh��)��
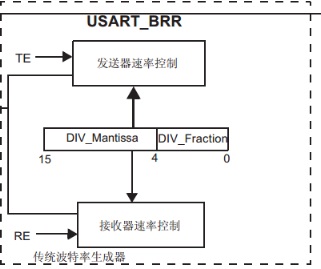
��5��USARTDIV��һ�����c��(sh��)���M�Џ����D(zhu��n)�Q�����ͣ����ɫ@����������(sh��)����DIV_Mantissa,���ͨ�^USATRDIV��ʽ�������С��(sh��)����DIV_Fraction��
��6���ڌ�������(sh��)���֕r������(sh��)λҪ����4λ������λ4�_ʼ��������(sh��)���֣�С��(sh��)����ֱ�ӌ��롣
2.4 ܛ���O(sh��)Ӌ
2.4.1 USART��������
��1���_GPIOA\USART1�r�
��2������GPIOA���(f��)������ݔ��
��3��ӳ��PA9�cPA10��USART_TX\USART_RX
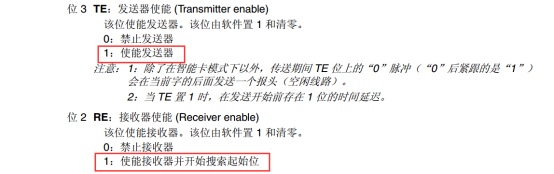
��4��������
��5������USARTģ�K
2.4.2 USARTģ�K����

2.4.3 USAR1��ʼ������(sh��)
2.5 �a��
2.5.1 ����
<1>������ʲô����ʲô�ã�
������һ�N����ȫ�pͨ�Žӿڣ�ͬ�����հl(f��)��(sh��)��(j��)����һ���҂�ֻʹ�î������ܡ�
�������c�ⲿ�O(sh��)��ͨ�š�������Ϣ���ⲿ���д���ͨ�Žӿڣ��Ϳ����c��Ƭ�C�M��ͨ�ţ���ESP8266ģ�K��RS485ģ�K�ȡ�
<2>ͬ���c���������⣿
ͬ���c�������ڃɂ��O(sh��)��ӑՓ��
ͬ���������й�ͬ�ĕr犾����ɕr犾������հl(f��)
�����������]�й����ĕr犾�����Ҫ�p������һ�ӵIJ����ʣ����C�հl(f��)�Ĝʴ_��
<3>�����c������
����
ֻ��һ������ɂ�����(sh��)��(j��)����һ��ֻ���հl(f��)һλ��(sh��)��(j��)���ɸ������O(sh��)Ӌ�Ǟ��˃ɂ��O(sh��)����ͬ�r�հl(f��)һλ��(sh��)��(j��)��
����
�ж����(sh��)��(j��)����һ����8�ı���(sh��)�����O(sh��)��8����(sh��)��(j��)����һ�οɂ���һ���ֹ�(ji��)��8λ���Ĕ�(sh��)��(j��)��
<4>�ι������p����ȫ�p����
���
һ��ֻ�ܽ��գ���һ��ֻ�ܰl(f��)�ͣ���ʼ���K�l(f��)�ͷ���׃���η���̶������磺�V���c�����C���V��ֻ�ܰl(f��)����̖�������Cֻ�ܽ�����̖�������Q��������������
���p����
ijһ�r�g�Σ�һ���l(f��)�͡���һ�����գ���һ���r�g�Σ�һ�����գ���һ���l(f��)�͡��p�������l(f��)�ͺͽ��գ�������ͬ�r�l(f��)�ͻ���ա����磺���v�C��
ȫ�p����
�p�����Զ�����ͬ�r�հl(f��)�����磺�Ԓ
<5>��������ʲô����ʲôҪ���ò����ʣ�
һ����܂�ݔ?sh��)Ķ����M��λ��(sh��)�����O(sh��)9600����1��犿���һ��ݔ9600λ����9.6Kbit��
����ͨ���p����Ҫ�Ђ��s�����l(f��)�ͷ��Զ����ٶȣ������ʣ��l(f��)�͔�(sh��)��(j��)�^ȥ������9600�������շ��ͱ���Ԍ���(y��ng)���ٶȣ��ٶȣ����գ��Ķ����C�xȡ�����_�Ĕ�(sh��)��(j��)��
<6>��α��C��(sh��)��(j��)�ʴ_�l(f��)���^ȥ����
USART����ͨ���Ԏ���ͨ�Ņf(xi��)�h��һ����(sh��)��(j��)λ10λ��11λ������ʹ��10λ����һ����(sh��)��(j��)��
һ����(sh��)��(j��)�Ę�(g��u)�ɣ�
<7>֪�R�I(l��ng)��
ģ�K�W(xu��)��(x��)�ĵã�
��(f��)���cͨ��.png (30.97 KB, ���d�Δ�(sh��): 70)

1.74 MB, ���d�Δ�(sh��): 10, ���d�e��: �ڎ� -5

293.03 KB, ���d�Δ�(sh��): 25, ���d�e��: �ڎ� -5
| �gӭ���R (http://m.raoushi.com/bbs/) | Powered by Discuz! X3.1 |

