一、實驗?zāi)康模?/font>
二、實驗內(nèi)容:
![]()
![]()
設(shè)系統(tǒng)開環(huán)傳遞函數(shù)一般表達式為
 (n≥m)
(n≥m)
則系統(tǒng)的穩(wěn)態(tài)誤差可表示為
設(shè) 0型系統(tǒng)的開環(huán)傳遞函數(shù)為![]()
Ⅰ型系統(tǒng)的開環(huán)傳遞函數(shù)為![]()
Ⅱ型系統(tǒng)的開環(huán)傳遞函數(shù)為![]()
實驗問題:6、系統(tǒng)開環(huán)傳遞函數(shù)如下
![]()
T1=0.3,T2=0.4,要求如下:
系統(tǒng)階躍穩(wěn)態(tài)誤差 |
K=1時 0.5 |
K=3時 0.25 |
K=5時 0.1667 |
K=8時 0.1111 |

系統(tǒng)斜坡穩(wěn)態(tài)誤差 |
K=1時 50.175 |
K=3時 5.1312 |
K=5時 3.4306 |
K=8時 2.2914 |
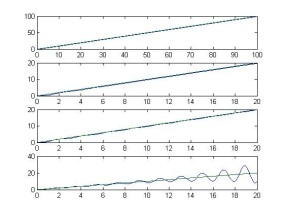
(2)v=1;K=1,3,5,8時觀察系統(tǒng)階躍響應(yīng)和斜坡響應(yīng),并測量其穩(wěn)態(tài)誤差
系統(tǒng)階躍穩(wěn)態(tài)誤差 |
K=1時 -4.68E-07 |
K=3時 5.71E-04 |
K=5時 -0.1543 |
K=8時 -21.4944 |
系統(tǒng)斜坡穩(wěn)態(tài)誤差 |
K=1時 1 |
K=3時 0.3328 |
K=5時 0.1817 |
K=8時 10.1566 |
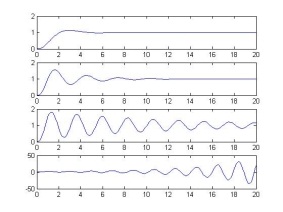
階躍程序:t=0:0.1:20
[num1,den1]=cloop([1],[0.12 0.7 1 0 0]);
[num2,den2]=cloop([3],[0.12 0.7 1 0 0]);
[num3,den3]=cloop([5],[0.12 0.7 1 0 0]);
[num4,den4]=cloop([8],[0.12 0.7 1 0 0]);
y1=step(num1,den1,t);
y2=step(num2,den2,t);
y3=step(num3,den3,t);
y4=step(num4,den4,t);
subplot(411);plot(t,y1);
subplot(412);plot(t,y2);
subplot(413);plot(t,y3);
subplot(414);plot(t,y4);
er1=1-y1(length(t));
er2=1-y2(length(t));
er3=1-y3(length(t));
er4=1-y4(length(t));
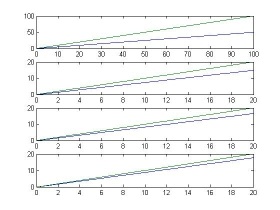
斜坡程序:t=0:0.1:20
t1=0:0.1:100;
[num1,den1]=cloop([1],[0.12 0.7 1 0]);
[num2,den2]=cloop([3],[0.12 0.7 1 0]);
[num3,den3]=cloop([5],[0.12 0.7 1 0]);
[num4,den4]=cloop([8],[0.12 0.7 1 0]);
y1=step(num1,[den1 0],t1);
y2=step(num2,[den2 0],t);
y3=step(num3,[den3 0],t);
y4=step(num4,[den4 0],t);
subplot(411);plot(t1,y1,t1,t1);
subplot(412);plot(t,y2,t,t);
subplot(413);plot(t,y3,t,t);
subplot(414);plot(t,y4,t,t);
er1=t1(length(t1))-y1(length(t1));
er2=t(length(t))-y2(length(t));
er3=t(length(t))-y3(length(t));
er4=t(length(t))-y4(length(t));
系統(tǒng)階躍穩(wěn)態(tài)誤差 |
K=1時 -32.1652 |
K=3時 1.36E+04 |
K=5時 2.01E+05 |
K=8時 -1.18E+07 |
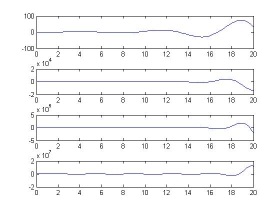
系統(tǒng)斜坡穩(wěn)態(tài)誤差 |
K=1時 -1.57E+10 |
K=3時 7.42E+03 |
K=5時 -1.48E+05 |
K=8時 -7.69E+06 |
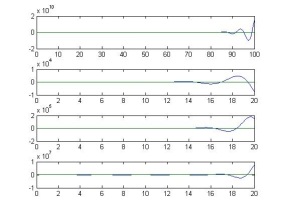
(4)說明系統(tǒng)型別和K的參數(shù)對穩(wěn)態(tài)誤差的影響。
在階躍輸入作用下,僅0型系統(tǒng)有穩(wěn)態(tài)誤差,其大小與階躍輸入的幅值成正比,與系統(tǒng)的開環(huán)增益成反比。對I型及I型以上的系統(tǒng),其穩(wěn)態(tài)誤差為0
在斜坡輸入之下,0型系統(tǒng)的輸出量不能跟蹤其輸入量的變化,這是因為輸出量的速度小于輸入量的速度,導(dǎo)致兩者的差距不斷增大,穩(wěn)態(tài)誤差趨于無窮大,穩(wěn)態(tài)時,I型系統(tǒng)的輸出量與輸入量雖以相同的速度變化,但前者較后者在位置上落后一個常量,這個常量就是穩(wěn)態(tài)誤差。穩(wěn)態(tài)情況下II型及II型以系統(tǒng)的輸出量與輸入量不僅速度相等,而且位置相同。
完整的Word格式文檔51黑下載地址:
 實驗四實驗報告.docx
(161.5 KB, 下載次數(shù): 6)
實驗四實驗報告.docx
(161.5 KB, 下載次數(shù): 6)
| 歡迎光臨 (http://m.raoushi.com/bbs/) | Powered by Discuz! X3.1 |