 而課程設計所需要測得頻率不需要太大,因此不需要外加分頻器。顯示部分用液晶顯示模塊,以使測量結果更加直接、明確。
而課程設計所需要測得頻率不需要太大,因此不需要外加分頻器。顯示部分用液晶顯示模塊,以使測量結果更加直接、明確。1 系統概述
1.1研究背景在電子系統非常廣泛的應用領域內,到處可見到處理離散信息的數字電路。數字電路制造工業的進步,使得系統設計人員能在更小的空間內實現更多的功能,從而提高了系統的可靠性和速度。集成電路的類型很多,從大的方面可以分為模擬電路和數字集成電路兩大類。數字集成電路廣泛用于計算機、控制與測量系統,以及其它電子設備中。一般說來,數字系統中運行的電信號,其大小往往并不改變,但在實踐分布上卻有著嚴格的要求,這是數字電路的一個特點。數字集成電路作為電子技術最重要的基礎產品之一,已廣泛地深入到各個應用領域。測量頻率是電子測量技術中最常見的測量之一,不少物理量的測量, 如時間、速度等都涉及到或本身可轉化為頻率的測量。數字頻率計是用數字顯示被測信號頻率的儀器,被測信號可以是正弦波、方波或其它周期性變化的信號,如配以適當的傳感器,可以對多種物理量進行測試,比如機械振動的頻率,轉速,聲音的頻率以及產品的計件等等。 因此,數字頻率計是一種應用很廣泛的儀器。
1.2 發展現狀數字頻率計發展到現在,有基于CPLD的數字頻率計的設計,基于VHDL語言的數字頻率計的設計,還有基于單片機的簡易數字頻率計等。CPLD是一種新興的高密度大規模可編程邏輯器件,它具有門陣列的高密度和PLD器件的靈活性和易用性,目前已成為一類主要的可編程器件;可編程器件的最大特點是可通過軟件編程對其器件的結構和工作方式進行重構,能隨時進行設計調整而滿足產品升級,使得硬件的設計可以如軟件設計一樣方便快捷,從而改變了傳統數字系統及用單片機構成的數字系統的設計方法、設計過程及設計概念,使電子設計的技術操作和系統構成在整體上發生了質的飛躍。VHDL誕生于1982年,是由美國國防部開發的一種快速設計電路的工具,目前已經成為IEEE的一種工業標準硬件描述語言;相比傳統的電路系統的設計方法,VHDL具有多層次描述系統硬件功能的能力,支持自頂向下(Top to Down)和基于庫(Library Based)的設計的特點。單片機技術在短短的20余年間已發展成為計算機技術中一個非常有活力的分支,它有自己的技術特征、規范、發展道路和應用環境。
1.3 單片機的發展目前計算機硬件技術向巨型化、微型化和單片化三個方向發展。自1975年美國德克薩斯儀器公司第一塊單片機芯片TMS-1000問世以來,在短短的30余年間,單片機技術已發展成為計算機技術中一個非常有活力的分支,它有自己的技術特征、規范、發展道路和應用環境。按單片機的生產技術和應用對象,單片機先后經歷了4位機、8位機、16位機、32位機幾個有代表性的發展階段。
單片機與通用微機相比較,在結構、指令設置上均有其獨特之處,其主要特點有:
1) 單片機的存儲器ROM和RAM是嚴格區分的,ROM稱為程序存儲器,只存放固定常數及數據。RAM則為數據存儲器,用于工作區及存放用戶數據。
從80年代單片機被引入我國,單片機已廣泛地應用于電子設計中。單片機的應用迅速發展,其性價比高,大量的外圍接口電路,使基于單片機的電子系統設計方便,周期縮短,而且不斷發展。新型單片機支持高級語言,進一步延伸了其發展空間。
2 方案論證與選擇
測量頻率有測頻法和測周法兩種。
(1)測頻法,利用外部電平變化引發的外部中斷,測算1s內的波數,從而實現對頻率的測定;
(2)測周法,通過測算某兩次電平變化引發的中斷之間的時間,實現對頻率的測定。簡而言之,測頻法是直接根據定義測定頻率,測周法是通過測定周期間接測定頻率理論上,測頻法適用于較高頻率的測量,測周法適用于較低頻率的測量。
經過調校,在測量低頻信號時,本項目中測頻法精度已高于測周法,故舍棄測周法,全量程采用測頻法。
2.1方案初步設計2.1.1基于單片機的頻率計的設計
設計的基于單片機頻率計的原理框圖如圖2-1所示:
復位電路采用上電復位方式,每次單片機上電工作時使單片機處于復位狀態,即初始狀態,為測量頻率作好準備。
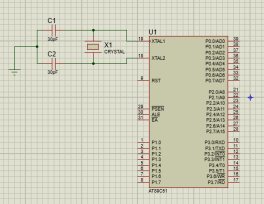
時鐘電路中片內高增益反相放大器通過XTAL1、XTAL2外接作為反饋元件的晶振(呈感性)與電容組成的并聯諧振回路構成一個自激振蕩器向內部時鐘電路提供振蕩時鐘,由此向單片機提供振蕩脈沖。
AT89C51單片機內部具有2個16位的定時器/計數器,并可以在定時或計數溢出時產生中斷。將被測信號通過P3.5口送入單片機,將T0設置為定時方式,每50ms產生一次中斷,產生20次中斷所用時間正好為1S,將T1設置為計數方式,T1的初值設置為0,計65535個脈沖后產生一次溢出中斷,在T1中斷溢出時對溢出次數進行計數(計數值為N)。1S內T1計的總的脈沖數為65535×N+TH1×256+TL1,這個數值就是被測信號的頻率值。
單片機計的脈沖數值經過轉換送到液晶顯示模塊1602,從而顯示被測信號的頻率,測量結果用十進制表示,很直接。
2.1.2基于單片機頻率計設計的優缺點
優點:單片機在控制領域中有很多優點,如體積小、成本低、運用靈活、抗干擾能力強,可以方便地實現多機和分布式控制。并且利用單片機設計的頻率計原理框圖簡單,所用元器件少,電路不易出錯,其程序存放在內部存儲器上,不需要外部存儲器芯片,使用方法簡單。且單片機便宜、穩定、開發簡單、通用性好。
缺點:所測信號的頻率范圍窄,若要擴大頻率范圍需外加分頻器。
而課程設計所需要測得頻率不需要太大,因此不需要外加分頻器。顯示部分用液晶顯示模塊,以使測量結果更加直接、明確。
3 系統的硬件設計
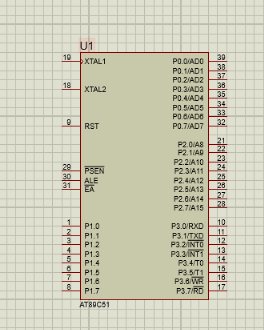
3.1系統硬件電路的設計3.1.1 單片機的管腳
AT89C51單片機的管腳排部如圖3-1所示。
 3.1.2 單片機的外圍電路
3.1.2 單片機的外圍電路
圖3-2內部時鐘方式圖
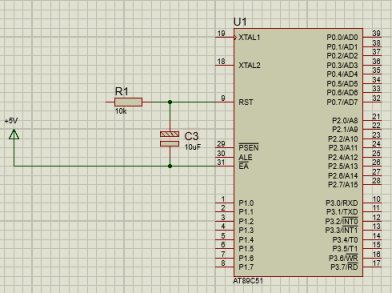 單片機的復位電路可采用上電復位或按扭復位,實際中常應用上電復位的方式,設計的上電復位方式圖如圖3-3所示。
單片機的復位電路可采用上電復位或按扭復位,實際中常應用上電復位的方式,設計的上電復位方式圖如圖3-3所示。圖3-3上電復位方式圖
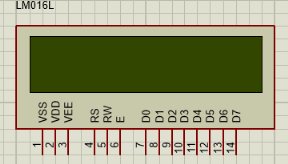
3.1.3 液晶顯示模塊1602
 液晶顯示器(LCD)具有顯示信息豐富、功耗低、體積小、重量輕、超薄等許多其他顯示器無法比擬的優點,近幾年來被廣泛用于單片機控制的智能儀器、儀表和低功耗電子產品中。LCD型顯示器的構成原理很簡單,在兩片透明絕緣的有機薄膜或者玻璃之間均勻充填著液晶流體,底層透明薄膜上鍍有一層導電體,而頂層透明薄膜上則按需要的形狀敷有透明的導電電極,當電極通電后,就與下層導電體之間(約10μm)形成一個電場,由于這個電場的作用,其間的液晶體的透光狀況就發生了變化,從而對外來光線產生了吸收作用,使人們看見了與電極形狀相同的字形顯示。
液晶顯示器(LCD)具有顯示信息豐富、功耗低、體積小、重量輕、超薄等許多其他顯示器無法比擬的優點,近幾年來被廣泛用于單片機控制的智能儀器、儀表和低功耗電子產品中。LCD型顯示器的構成原理很簡單,在兩片透明絕緣的有機薄膜或者玻璃之間均勻充填著液晶流體,底層透明薄膜上鍍有一層導電體,而頂層透明薄膜上則按需要的形狀敷有透明的導電電極,當電極通電后,就與下層導電體之間(約10μm)形成一個電場,由于這個電場的作用,其間的液晶體的透光狀況就發生了變化,從而對外來光線產生了吸收作用,使人們看見了與電極形狀相同的字形顯示。圖3-4 1602的管腳排部
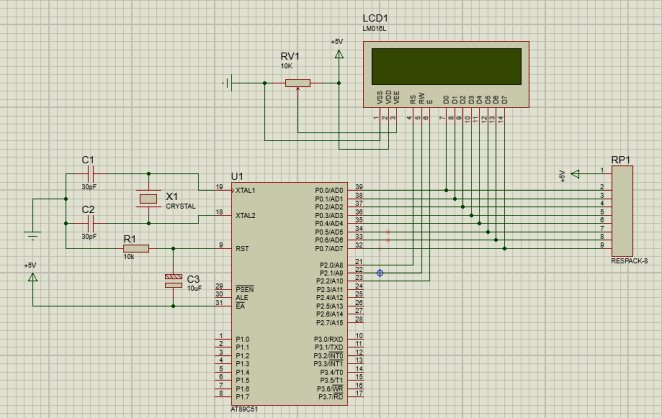 3.1.4 硬件電路原理圖
3.1.4 硬件電路原理圖
圖3-5系統硬件電路原理圖
3.1.5元器件的選擇
元器件名稱 | 規格/型號 | 數量 |
單片機 | AT89S51 | 1pc |
瓷片電容 | 30PF/63V | 2pc |
電解電容 | 10μF/25V | 1pc |
晶振 | 12MHz | 1pc |
金屬膜電阻 | 10K/ | 1pc |
電位器 | 10K/ | 1pc |
液晶顯示屏 | 1602 | 1pc |
表3-1硬件電路中所選用的元器件的規格/型號
4 系統的軟件設計
4.1 定時器/計數器工作方式的設置 ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

圖4-1TMOD的位定義
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

4.2.1 中斷的設置

圖4-3IE的位定義
EX0:外部中斷0的中斷允許位。EX0=0,禁止外部中斷0中斷;ET0=1,允許外部中斷0中斷。
試驗中需開中斷允許總控位,需允許定時器T0和T1中斷,因此在編程時使EA=1,使ET0=1且ET1=1。
中斷源有多種, 每個中斷源的優先級可通過中斷優先級寄存器IP進行設置并管理。IP的位定義如圖4-4所示。


圖4-4IP的位定義
PT2: 定時器/計數器T2的中斷優先級控制位。
4.2.2 液晶顯示模塊1602內部的控制指令
指 令 | RS | R/W | E | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
清顯示 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
光標返回 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | * |
置輸入模式 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | I/D | S |
顯示開/關控制 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | D | C | B |
光標或字符移位 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | S/C | R/L | * | * |
置功能 | 0 | 0 | 1 | 0 | 0 | 1 | DL | N | F | * | * |
置字符發生存儲器地址 | 0 | 0 | 1 | 0 | 1 | 字符發生存儲器地址(AGG) | |||||
置數據存儲器地址 | 0 | 0 | 1 | 1 | 顯示數據存儲器地址(ADD) | ||||||
讀忙標志或地址 | 0 | 1 | 1 | BF | 計數器地址(AC) | ||||||
寫數到CGRAM或DDRAM | 1 | 0 | 1 | 要寫的數 | |||||||
從CGRAM或DDRAM讀數 | 1 | 1 | 1 | 讀出的數據 | |||||||
表4-1控制指令表
5 程序的編譯、仿真
5.1在Keil環境下的程序編寫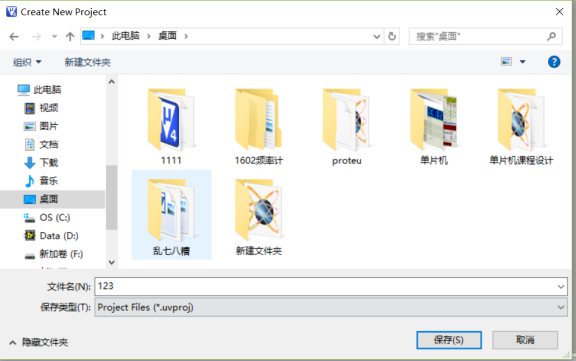 圖5-1新建工程
圖5-1新建工程
然后選擇單片機型號89c51
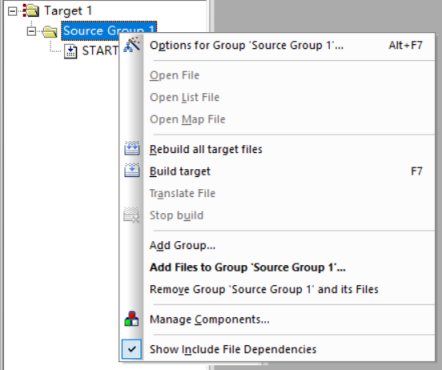
圖5-2 添加文件
輸入源程序后,單擊“project”按鈕下的“Build project, translate”按鈕,程序無錯誤時界面圖5-3如圖:
![]()
圖5-3無錯誤界面
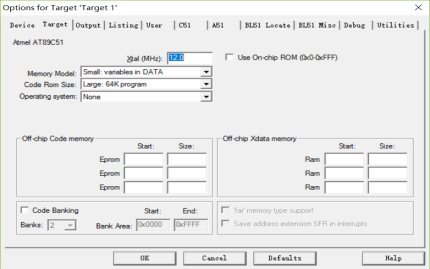
圖5-4 設置頻率界面
單擊圖中的“Create HEX File” 選項,使程序編譯后產生 HEX 代碼。程序即編寫好。
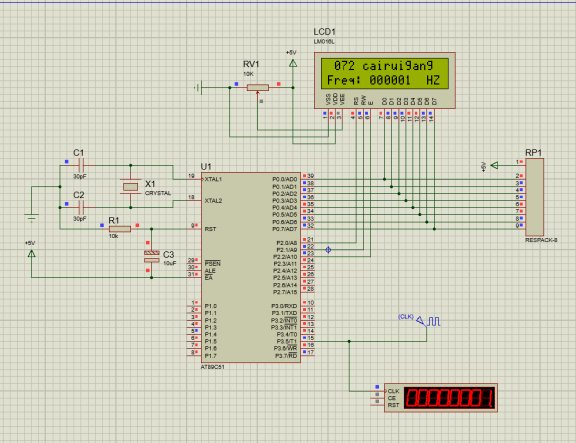
圖5-5輸入頻率為1Hz時的仿真結果
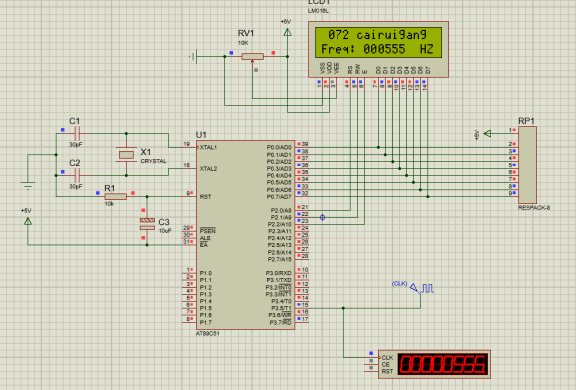
圖5-6輸入頻率為555Hz時仿真結果
6 結論
7 心得
通過這次單片機課程設計,讓我感到了做好一件事是不容易的,對于單片機這門課,本來腦子里呈現出來就是一個‘難’字,果然,由于自己落下了一些內容后,沒有好好預習,導致全盤落下,最后搞得好多都不懂,自己也明白到后面的課程設計不好做,會更加難過。
老師布置任務后,都很迷茫,然后呢看著那些課程設計題目,自己選了一個,基于51單片機的數字頻率計的設計,這時才明白該好好做些事情了,自己開始查了好多資料,能用的微乎其微,當自己畫好電路圖后,又對程序開始發愁,又問了好多同學、學長還有網上的資料,終于,程序有了,然后運行的時候卻不行了,一直愁困了我好多天,終于在網上找到了答案,至此,課程設計基本完成,然后寫報告。真的,好久沒有這么認真做作業了,還有一年多時間,多學點東西才對。

4.4 系統軟件設計中的主要子程序
4.4.1 T1計數器中斷服務子程序
根據圖3.11中的T1中斷服務子程序流程圖設計的T1計數器中斷服務子程序如下。
TIMER1:
INC 2AH
RETI
4.4.2 T0定時器中斷服務子程序
根據圖3.10中的T0中斷服務子程序流程圖設計的T0定時器中斷服務子程序如下。
TIMER_INT:
CLR TR0
MOV TL0, TIMER_L
MOV TH0, TIMER_H
INC TIMCOUNT
MOV A , TIMCOUNT
CPL P1.4
CJNE A, #20H,T_END
CLR TR1
MOV TIMCOUNT ,#00H;
MOV INT_L, TL1
MOV INT_H, TH1
MOV INT_G, 2AH
MOV TH1, #00H
MOV TL1, #00H
MOV 2AH, #00H
SETB TR1
SETB TR0
RETI
4.4.3 數據處理子程序
根據圖中的數據處理子程序流程圖設計的數據處理子程序如下。
SBIN_SBCD:
CLR A
MOV T_G, A
MOV T_H, A
MOV T_M, A
MOV T_S, A
MOV R5, INT_G
MOV R7, INT_L
MOV R6, INT_H
MOV R2, #24
CLR C
SBIN_SBCD1:
MOV A, R7
RLC A
MOV R7, A
MOV A, R6
RLC A
MOV R6, A
MOV A, R5
RLC A
MOV R5, A
MOV A, T_S
ADDC A, T_S
DA A
MOV T_S, A
MOV A, T_M
ADDC A, T_M
DA A
MOV T_M, A
MOV A, T_H
ADDC A, T_H
DA A
MOV T_H, A
MOV A, T_H
ADDDC A, T_H
DA A
MOV T_G, A
MOV A, T_G
DA A
MOV T_G, A
DJNZ R2, SBIN_SBCD1
POP PSW
RET
 201423030309 鐘明超.doc
(802 KB, 下載次數: 155)
201423030309 鐘明超.doc
(802 KB, 下載次數: 155)
| 歡迎光臨 (http://m.raoushi.com/bbs/) | Powered by Discuz! X3.1 |