ժҪ
������Ҫ�о�������MCS-51ϵ�І�Ƭ�C����PWM��̖�Ķ����F(xi��n)��ֱ��늙C�D(zhu��n)���M�п��Ƶķ����������в��������O�ܽM����PWM��̖���(q��)��ϵ�y(t��ng)�����Ҍ�PWM��̖��ԭ�����a(ch��n)�������Լ����ͨ�^ܛ�����̌�PWM��̖ռ�ձ��M���{(di��o)��(ji��)���Ķ�������ݔ����̖���εȾ�����Ԕ�����U�������⣬��ϵ�y(t��ng)��ʹ���˻���Ԫ����ֱ��늙C���D(zhu��n)���M�Мy������(j��ng)�^̎�����y��ֵ�͵�Һ���@ʾ������
1 ����
�ڬF(xi��n)����Ӯa(ch��n)Ʒ�У��Ԅӿ���ϵ�y(t��ng)����Ӄx���O(sh��)�䡢��������������ߵȵȷ��棬ֱ��늙C���õ��ˏV���đ�(y��ng)�á������Ϥ������C��늳��C������C�����Ӌ��C�ȣ�������ȱ��ֱ��늙C������ֱ��늙C�Ŀ�����һ�T�܌��õļ��g(sh��)��ֱ��늙C�����w�Ͽɷ֞���������@�M�IJ��M늙C������ʽ�Q����ֱ��늙C���ŷ�늙C�� �����늉�����늙C
ֱ��늙C�����c�dž����D(zhu��n)�ش�����D(zhu��n)�ش��D(zhu��n)�ٿ������ף��{(di��o)�ٺ�Ч�ʺܸߡ��c�����{(di��o)����ȣ�ֱ��늙C�Y(ji��)��(g��u)��(f��)�s�����a(ch��n)�ɱ��ߣ��S�o���������S�����ʾ��w�ܵĆ����Լ�ʸ�����Ƽ��g(sh��)�ij��죬ʹ��ʸ������׃�l���g(sh��)�@��Ѹ�Ͱl(f��)չ���Ķ����Ƴ����N��͡����N���ʵ�׃�l�{(di��o)���b�ã����ڹ��I(y��)�ϵõ��V����(y��ng)�á��m�÷�����ֱ���{(di��o)�������ԑ�(y��ng)�����켈ӡˢ������ӡȾ�����|�O(sh��)�䡢늹����g(sh��)�O(sh��)�䡢ʳƷ�ӹ��Cе�����z�ӹ��Cе��������ˎ�O(sh��)�䡢�·���O(sh��)�䡢������� ���طN�ӹ����p���I(y��)�� ݔ���O(sh��)�� ܇�v���̡��t(y��)���O(sh��)�䡢ͨӍ�O(sh��)�䡢���_�O(sh��)�� ���ИI(y��)�С������ܵĽ������ӑ�(y��ng)�ñ��������������ڹ��I(y��)���T�У��ÿ��{(di��o)�ٽ�������ȡ��ֱ�����ӌ��ɞ�vʷ�ı�Ȼ��
�M����ˣ����J���O(sh��)Ӌһ��ֱ��늙C�{(di��o)��ϵ�y(t��ng)����Փ�ǏČW(xu��)��߀�nj��`�ĽǶȣ���һ���C늹��̌��I(y��)�Ĵ�W(xu��)�������a(ch��n)���e�O�����ã���������ߌW(xu��)�����顣
ֱ��늙C���������õ����Ƅ����ܣ��ɑ�(y��ng)�����ڴ���(n��i)��ƽ���{(di��o)�٣�Ҳ�ɏV���đ�(y��ng)�����S����Ҫ�{(di��o)�ٻ������������τ��I(l��ng)���С��ڿ��ƽǶȁ�����ֱ���{(di��o)�ٸ��ǽ����τ�ϵ�y(t��ng)�Ļ��A(ch��)�����ڵĿ���ϵ�y(t��ng)�^����ģ�M�·������A(ch��)�����\��Ŵ������Ǿ��Լ����·��������(sh��)���·�ȣ�����ϵ�y(t��ng)��Ӳ�����ֹ��ܱ��^��(f��)�s�����ܱ��^��һ������ܛ��ϵ�y(t��ng)���`������{(di��o)ԇ��������ֱ��늄әC�{(di��o)�ټ��g(sh��)�l(f��)չ�͑�(y��ng)�÷��������S����Ƭ�C���Ƽ��g(sh��)�Ŀ��ٰl(f��)չ��ʹ���S����ƹ����㷨�Լ�ܛ��������ɣ���ֱ��늄әC�{(di��o)�ٿ����ṩ�˸���İl(f��)չ���g����ʹϵ�y(t��ng)�_�����ߵ����ܡ����Æ�Ƭ�C��(g��u)�ɿ���ϵ�y(t��ng)�����Թ�(ji��)�s�����YԴ�ͽ���ϵ�y(t��ng)�ɱ����Ķ���Ч����߹���Ч�ʡ�
���y(t��ng)�Ŀ���ϵ�y(t��ng)����ģ�MԪ�����mȻ�M�������a(ch��n)Ҫ������Ԫ�����ϻ���ʹ�Õr�����ܵ��ɔ_Ӱ푣����Ҿ�·��(f��)�s������Ч���ܵ��������ܡ��ضȵ����ص�Ӱ푣���ϵ�y(t��ng)���\�пɿ��Լ��ʴ_�Եò������C���������F(xi��n)�¹ʡ�
Ŀǰ��ֱ��늄әC�{(di��o)��ϵ�y(t��ng)��(sh��)�ֻ��ѽ�(j��ng)����?q��)��û������S����Ӽ��g(sh��)�ĸ߶Ȱl(f��)չ����ʹֱ��늙C�{(di��o)����ģ�M����(sh��)�ֻ��D(zhu��n)׃���e�dž�Ƭ�C���g(sh��)�đ�(y��ng)�ã�ʹֱ��늙C�{(di��o)�ټ��g(sh��)���M�뵽һ���µ��A�Σ����ܻ����߿ɿ����ѳɞ����l(f��)չ��څ�ݡ���ˌ��F(xi��n)ֱ���o���{(di��o)�ٌ��҂�������a(ch��n)�����������ش�����x��
ֱ��늄әC����(j��)��ŷ�ʽ��ͬ���֞��Ԅ������ɷN��͡���ͬ��ŷ�ʽ�ęCе��������������ͬ������ֱ��늄әC���D(zhu��n)�������¹�ʽ��
n=U/Cc![]() -TR��(n��i)/CrCc
-TR��(n��i)/CrCc![]() ����ʽ 1-1��
����ʽ 1-1��
����
U��늉��� ![]() ������@�M��裻
������@�M��裻
![]() ����ͨ(Wb)��Cc��늄ݳ���(sh��)��Cr���D(zhu��n)�س�����
����ͨ(Wb)��Cc��늄ݳ���(sh��)��Cr���D(zhu��n)�س�����
����ʽ��֪��ֱ��늙C���ٶȿ��ƷփɷN��������늘п��Ʒ��ʹň����Ʒ������^�ɷN������(y��u)�ӣ����ڴň����Ʒ�������ƹ����^С�����ق��ӕr���ܵ��ŘO����ƣ������ق��ӕr���ܵ��Q��͓Q�����Y(ji��)��(g��u)���ơ����Դň����Ʒ��������m��늘п��Ʒ���늙C�{(di��o)�����DZ��^���õķ�����ֱ��늄әC�Ļ����Y(ji��)��(g��u)ֱ��늙C�ĽY(ji��)��(g��u)�Ƕ�N���ӵ�,���κ�ֱ��늙C���������Ӳ��ֺ��D(zhu��n)�� ����,�@�ɲ����g������һ����С�Ě�϶,ʹ늙C���·�ʹň��l(f��)�������\ ��.ֱ��늙C���Ӳ�����Ҫ�����ŘO,�ˢ�b�ú͓Q��O�ȽM��,�D(zhu��n)�Ӳ��� ��Ҫ��늘��@�M,�Q�������D(zhu��n)�S�Ș�(g��u)�ɣ���D1-1��ʾ��

�D1-1 ֱ��늙C�Ĺ���ԭ��D
늘п��Ƽ��ڄ��늉���׃����r�£��ѿ���늉���̖�ӵ�늙C��늘��ϣ��Կ���늙C���D(zhu��n)�١���늙C�{(di��o)���ЏV��ʹ�ã������}���{(di��o)�Ƒ�(y��ng)�ÏV�����}���{(di��o)�ٵĸ���������һ���̶����l�ʁ������Դ�Ľ�ͨ����_����ͨ�^��׃һ�����ڃ�(n��i)����ͨ���͡����_���r�g���L�̣�����׃ֱ��늙C늘���늉��ġ�ռ�ձȡ�����׃ƽ��늉��Ĵ�С���Ķ�����늄әC���D(zhu��n)�١�
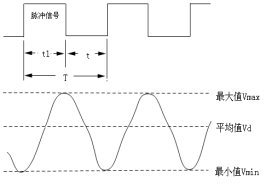
����(j��)�ψD����늄әCʼ�K��ͨ�Դ�r��늙C�D(zhu��n)������![]() ��ռ�ձȞ�D=
��ռ�ձȞ�D=![]() /T���t늙C��ƽ���ٶȞ飺
/T���t늙C��ƽ���ٶȞ飺![]() ����ҊֻҪ��׃ռ�ձ�D���Ϳ��Ե�
����ҊֻҪ��׃ռ�ձ�D���Ϳ��Ե�
����ͬ��늙C�ٶȣ��Ķ����F(xi��n)�{(di��o)�١�
PWM�������·���{(di��o)��ϵ�y(t��ng)�����چ�Ƭ�C���ܛ���팍�F(xi��n)PWM����PWM�{(di��o)��ϵ�y(t��ng)��ռ�ձ���һ����Ҫ����(sh��)���Դ늉���׃�r��늘ж�늉���ƽ��ֵȡ�Q��ռ�ձȵĴ�С����׃��ֵ���Ը�׃늘ж�늉���ƽ��ֵ��
1�������{(di��o)�l��������![]() ��׃��ֻ��׃t��ʹ����Ҳ�S֮��׃��
��׃��ֻ��׃t��ʹ����Ҳ�S֮��׃��
2���{(di��o)���{(di��o)�l��������t��׃��ֻ��׃![]() ��ʹ���ڻ��l��Ҳ�S֮��׃��
��ʹ���ڻ��l��Ҳ�S֮��׃��
3�����l�{(di��o)��������������T(���l��)��׃��ͬ�r��׃![]() ��t��
��t��
1��2�������{(di��o)�ٕr��׃�˿����}�_�����ڻ��l�ʣ��������}�_���l���c
ϵ�y(t��ng)�Ĺ����l�ʽӽ��r������������ʎ����������m���ö��l�{(di��o)��������׃ռ��
�ȏĶ���׃ֱ��늄әC늘Ѓɶ�늉���
ܛ�����ö��r�Д��M���O(sh��)Ӌ������Ƭ�C��늺�ϵ�y(t��ng)�M��ʂ��B(t��i)�������Ӱ��o���(zh��)������(y��ng)�ij�����(j��)P1.1�ĸߵ��ƽ?j��ng)Q��ֱ��늙C�����D(zhu��n)������(j��)�ӡ��p�ٰ��o���{(di��o)��P1.1ݔ���ߵ��ƽ��ռ�ձȣ��Ķ����Կ��Ƹߵ��ƽ���ӕr�r�g���M������늉��Ĵ�С��Q��ֱ��늙C���D(zhu��n)�١�
2 ϵ�y(t��ng)Ӳ���·���O(sh��)Ӌ
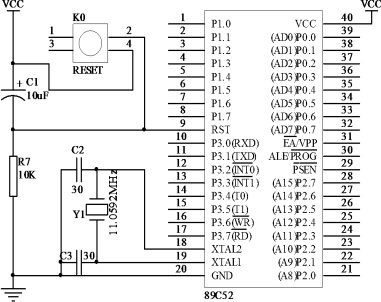
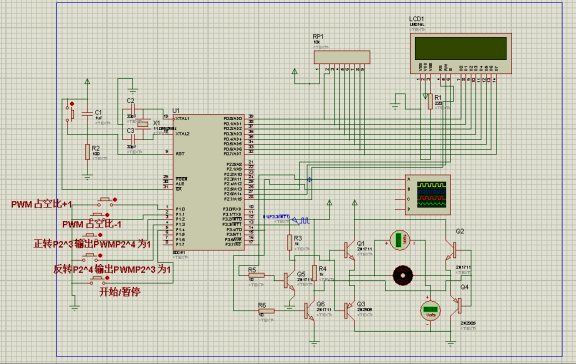
��ϵ�y(t��ng)����STC89C51����ݔ����(sh��)��(j��)���Ɇ�Ƭ�CIO�ڮa(ch��n)��PWM��̖���͵�ֱ��늙C��ֱ��늙Cͨ�^�y���·�����r�D(zhu��n)���ͻ؆�Ƭ�C���M���D(zhu��n)���@ʾ���Ķ����F(xi��n)��늙C�ٶȺ��D(zhu��n)��Ŀ��ƣ��_��ֱ��늙C�{(di��o)�ٵ�Ŀ�ġ�
�D2-1ϵ�y(t��ng)���w�O(sh��)Ӌ�D
STC89C51��Ƭ�C��CPU��8�������M�ɣ�������ͨ�^Ƭ��(n��i)��һ�����B�ӣ�������Y(ji��)��(g��u)��Ȼ��ͨ��CPU�������оƬ�ĽY(ji��)��(g��u)ģʽ�����ڹ��܆�Ԫ�Ŀ����ϲ���������ܼĴ����ļ��п��Ʒ�����������M�����D��ʾ��
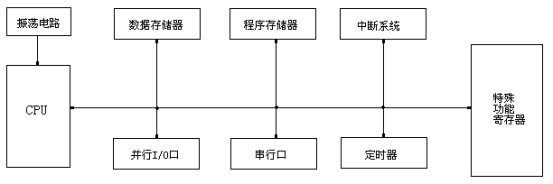
����̎����CPU�����dž�Ƭ�C�ĺ��ģ�����\��Ϳ��ƹ��ܡ�
��(n��i)����(sh��)��(j��)�惦����STC89C51оƬ�й���256��RAM��Ԫ��������惦��ʹ�õ�ֻ��ǰ128����Ԫ�����ַ��00H��7FH��ͨ���f�ă�(n��i)����(sh��)��(j��)�惦������ָ�@ǰ128����Ԫ�����Q��(n��i)��RAM��
��(n��i)������惦����STC89C51оƬ��(n��i)������4K����Ԫ�����ڴ惦����ԭʼ��(sh��)��(j��)������Q��(n��i)��ROM��
���r����STC89C51Ƭ��(n��i)��2��16λ�Ķ��r�����Á팍�F(xi��n)���r����Ӌ��(sh��)���ܣ��������䶨�r��Ӌ��(sh��)�Y(ji��)����Ӌ��C�M�п��ơ�
�Д����ϵ�y(t��ng)��ԓоƬ����5���Д�Դ�����ⲿ�Д�2�������r/Ӌ��(sh��)�Д�2���ʹ����Д�1����

XTAL2�����Է�����ʎ����ݔ����
3 PWM��̖�l(f��)���·�O(sh��)Ӌ
�{(di��o)�ٲ���PWM��Pulse Width Modulation���}���{(di��o)�ƣ�����ԭ����ͨ�^�a(ch��n)�����β�����׃ռ�ձȣ����_���{(di��o)���}����Ŀ�ġ�PWM�Ķ��x:�}���{(di��o)��(PWM)������̎�����Ĕ�(sh��)��ݔ���팦ģ�M�·�M�п��Ƶ�һ�N�dz���Ч�ļ��g(sh��)���V����(y��ng)���ڏĜy����ͨ�ŵ����ʿ����c׃�Q���S���I(l��ng)���С�ģ�M��̖��ֵ�����B�m(x��)׃������r�g�ͷ��ȵķֱ��ʶ��]�����ơ�
늄әCPWM�(q��)��ģ�K���·����H���(q��)�ӣ��O(sh��)Ӌ�c���F(xi��n)���w�·Ҋ�D�����·���õ��ǻ���PWMԭ�����(q��)���·��
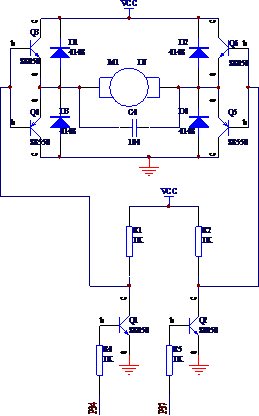
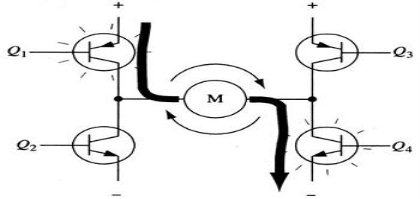
PWM�·�ɏ�(f��)���w�ܽM�ɣ��ɂ�ݔ��˸ߵ��ƽ���ƾ��w���Ƿ�(d��o)ͨ���ֹ��NPN�����O�ܸ��ƽݔ��r��(d��o)ͨ��PNP�����O�ܵ��ƽݔ��r��(d��o)ͨ����Q1��Q2����(d��o)ͨ�r��Q3��Q6��ֹ��Q4��Q5��(d��o)ͨ��늙C�ɶ˶���GND��늙C�Dz��D(zhu��n)�ģ���Q1��Q2����ֹ�r��Q3��Q6��(d��o)ͨ��Q4��Q5��ֹ��늙C�ɶ˶���VCC��늙CҲ�Dz��D(zhu��n)�ģ���ô����Q1��(d��o)ͨ��Q2��ֹ�r��Q4��Q6��(d��o)ͨ��늙C��߅���Դ����߅�ǵأ�늙C��r��D(zhu��n)�ӣ��˕r����Q2��ֹ��PWM����Q1�Č�(d��o)ͨ��ֹ���Ϳ��Կ���늙C���ٶȣ�ͬ������Q1��ֹ��Q2��(d��o)ͨ�r��Q3��Q5��(d��o)ͨ��늙C����߅���Դ����߅�ǵأ�늙C형r��D(zhu��n)�ӣ��˕r����Q1��ֹ��PWM����Q2�Č�(d��o)ͨ��ֹ�Ϳ��Կ���늙C���D(zhu��n)�١�4�����O�����·�е������Ƿ�ֹ���w�ܮa(ch��n)����������늉����Լ�늙C�ɶ�����;��w���ϵ�����^���o��
H��ʽ늄әC�(q��)���·����4�����O�ܺ�һ��늙C����������Π��c��ĸH���ƣ�����˶����������D ��ʾ��Ҫʹ늄әC�ɹ��\�D(zhu��n)��회����Ǿ��ϵ�һ�����O��ͨ늡���(j��)��ͬ�����O�܌��Č�(d��o)ͨͨ늵���r�����������������෴�������^늙C���Ķ���׃늙C���D(zhu��n)�ӷ���
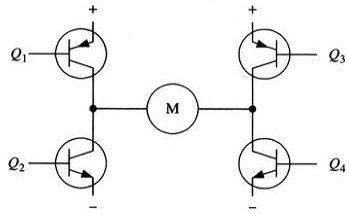
���Ҫ��ʹ늄әC�\�D(zhu��n)�����ʹ���Ǿ��σɂ����O��ͨ늡����磬��Q2���cQ3�܌�(d��o)ͨ�r����� ���Դ���O��(j��ng)Q2������ͨ�^늙C���ٽ�(j��ng) Q3���Դ��ؓ�O��ͬ��Q1�cQ4������ˣ���������^�ɿ����(q��)��늄әC��형r��D(zhu��n)�ӡ�
5 ���·�O(sh��)Ӌ
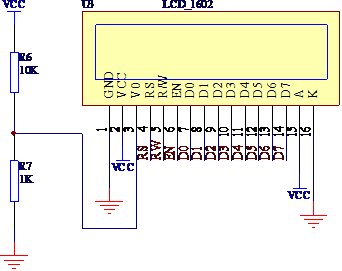
Һ�����ֵ��·�D���D��ʾ��

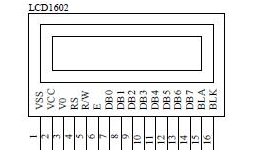
�@ʾ������ | 16��2���ַ� |
оƬ����늉��� | 4.5��5.5V |
��������� | 2.0mA(5.0V) |
ģ�K��ѹ���늉��� | 5.0V |
�ַ��ߴ磺 | 2.95��4.35��WXH��mm |
��̖ | ��̖ | ���_�f�� |
1 | VSS | �Դ�� |
2 | VDD | �Դ���O |
3 | VL | Һ���@ʾƫ����̖ |
4 | RS | ��(sh��)��(j��)/�����x��ˣ�H/L�� |
5 | R/W | �x/���x��ˣ�H/L�� |
6 | E | ʹ����̖ |
7 | D0 | Data I/O |
8 | D1 | Data I/O |
9 | D2 | Data I/O |
10 | D3 | Data I/O |
11 | D4 | Data I/O |
12 | D5 | Data I/O |
13 | D6 | Data I/O |
14 | D7 | Data I/O |
15 | BLA | ����Դ�� |
16 | BLK | ����Դؓ |
ָ��a | ���� | |||||||
0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | �O(sh��)��16*2�@ʾ��5*7�cꇣ�8λ��(sh��)��(j��)�ӿ� |
ָ��a | ���� | |||||||
0 | 0 | 0 | 0 | 1 | D | C | B | D=1�_�@ʾ D=0 �P(gu��n)�@ʾ C=1 �@ʾ���C=0 ���@ʾ��� B=1 ����W�qB=0 ��˲��W�q |
0 | 0 | 0 | 0 | 0 | 1 | N | S | N=1 ���x/��һ���ַ���ַָᘼ�1���ҹ�˼�1�� N=0 ���x/��һ���ַ���ַָᘜp1���ҹ�˜p1�� S=1 ����һ���ַ��������@ʾ����(N=1)��������(N=0),�Եõ���˲��ƄӶ������Ƅӵ�Ч���� S=0 ����һ���ַ��������@ʾ���Ƅӡ� |
LCD 1602���Բ��ÃɷN��ʽ�c��Ƭ�C�B�ӣ�һ�N�Dz���8λ��(sh��)��(j��)����D0��D7����RS��R/W��EN�������ƶ˿ڣ���һ�N��ֻ��D4��D7������λ��(sh��)��(j��)�փɴ��͡�
�M��LCD�O(sh��)Ӌ��Ҫ��LCD�Ŀ���/�(q��)�Ӻ����Ľӿ��O(sh��)Ӌ��������Ҫ��ͨ�^�ӿ��c���ͨ�š������(n��i)/���@ʾRAM�������(q��)�����������@ʾ��(sh��)��(j��)���(q��)����Ҫ�Ǹ���(j��)������Ҫ���(q��)��LCD�M���@ʾ��������߀�����Ѓ�(n��i)��ASCII�ַ��죬�����U�Ĵ������h�֎졣
��Ƭ�CAT89S52��P1.1�cLCD 1602��ʹ�ܶ�E���B��GND�c�x���x���R/W���B��P1.0�cRS���B����ʹ�ܶ�ʹ�ܕr����ͨ�^�����x��ˁ������x��(sh��)��(j��)������(sh��)��(j��)�����������P0�˿��cLCD 1602�Ĕ�(sh��)��(j��)�˿����B����ݔ��(sh��)��(j��)��
5.2.4 LCD 1602���@ʾ�c��������LCD 1602Һ��ģ�K��(n��i)�����ַ��l(f��)����(n��i)�棨CGROM���ѽ�(j��ng)�惦��160����ͬ���c��ַ��D�Σ��@Щ�ַ��У���������(sh��)�֡�Ӣ����ĸ�Ĵ�С�������õķ�̖�������ļ����ȣ�ÿһ���ַ�����һ���̶��Ĵ��a�������Ӣ����ĸ��A���Ĵ��a��01000001B��41H�����@ʾ�rģ�K�ѵ�ַ41H�е��c��ַ��D���@ʾ�������҂����ܿ�����ĸ��A����
LCD 1602Һ��ģ�K��(n��i)���Ŀ���������11�l����ָ������x����������Ļ��˵IJ�������ͨ�^ָ��́팍�F(xi��n)�ġ����f����1����ƽ��0����ƽ��
ָ��1�����@ʾ��ָ��a01H����ˏ�(f��)λ����ַ00Hλ�ã�
ָ��2����ˏ�(f��)λ����˷��ص���ַ00H��
ָ��3����˺��@ʾģʽ�O(sh��)��I/D������Ƅӷ����ƽ���ƣ����ƽ����S:��Ļ�����������Ƿ����ƻ������ơ����ƽ��ʾ��Ч�����ƽ�t�oЧ��
ָ��4���@ʾ�_�P(gu��n)���ơ�D���������w�@ʾ���_�c�P(gu��n)�����ƽ��ʾ�_�@ʾ�����ƽ��ʾ�P(gu��n)�@ʾC�����ƹ�˵��_�c�P(gu��n)�����ƽ��ʾ���Θˣ����ƽ��ʾ�o�Θ�B�����ƹ���Ƿ��W�q�����ƽ�W�q�����ƽ���W�q��
ָ��5����˻��@ʾ��λԪS/C�����ƽ�r�Ƅ��@ʾ�����֣����ƽ�r�Ƅӹ�ˣ�
ָ��6�������O(sh��)������DL�����ƽ�r��4λ���������ƽ�r��8λ����N�����ƽ�r������@ʾ�����ƽ�r�p���@ʾF�����ƽ�r�@ʾ5��7���c��ַ������ƽ�r�@ʾ5��10���c��ַ���
ָ��7���ַ��l(f��)����RAM��ַ�O(sh��)�ã�
ָ��8��DDRAM��ַ�O(sh��)�ã�
ָ��9���xæ��̖��˵�ַBF����æ��־λ�����ƽ��ʾæ���˕rģ�K���ܽ���������ߔ�(sh��)��(j��)���������ƽ��ʾ��æ��
ָ��10������(sh��)��(j��)��
ָ��11���x��(sh��)��(j��)��
Һ���@ʾģ�K��һ�����@ʾ�����������ڈ�(zh��)��ÿ�lָ��֮ǰһ��Ҫ�_�Jģ�K��æ��־����ƽ����ʾ��æ����t��ָ��ʧЧ��Ҫ�@ʾ�ַ��rҪ��ݔ���@ʾ�ַ���ַ��Ҳ���Ǹ��Vģ�K�������@ʾ�ַ���
���O(sh��)Ӌ���ð��I�ӵ͵ķ�ʽ���xȡ���I����Ƭ�C��ʼ�r��������ƽ�������I���µĕr���o��Ƭ�Cһ�����ƽ����Ƭ�C����̖�M��̎��
��Ƭ�C�I�P�Ъ����I�P�;��ʽ�I�P�ɷN�������I�Pÿһ��I/O ����ֻ��һ�����I�����I����һ�˽��Դ��ӵأ�һ��ӵأ����@�N�ӷ�������^������ϵ�y(t��ng)���ӷ�(w��n)���������ʽ�I�Pʽ�ӷ�������^��(f��)�s������ռ�õ�I/O�١�����(j��)���O(sh��)Ӌ����Ҫ�@���x���˪���ʽ�I�P�ӷ���
����ʽ�I�P�Č��F(xi��n)���������Æ�Ƭ�CI/O���xȡ�ڵ��ƽ�ߵ́��Д��Ƿ����I���¡������_���I��һ�˽ӵأ���һ�˽�һ��I/O �ڣ������_ʼ�r����I/O�����ڸ��ƽ��ƽ�r�o�I���rI/O�ڱ��o���ƽ�������I���r����I/O ���c�ض�·��ʹI/O �ڞ���ƽ�����Iጷź�Ƭ�C��(n��i)�����������ʹI/O����Ȼ���ָ��ƽ���҂���Ҫ���ľ����ڳ����в錤��I/O�ڵ��ƽ��B(t��i)�Ϳ����˽��҂��Ƿ��а��I�����ˡ�
���Æ�Ƭ�C���I�P̎���ĕr���漰����һ����Ҫ���^�̣��Ǿ����I�P��ȥ���ӡ��@���f�Ķ����ǙCе�Ķ��ӣ��Ǯ��I�P��δ�������µ��R��^(q��)�a(ch��n)�����ƽ����(w��n)�������F(xi��n)�������҂��ڰ��I�rͨ�^ע����Ա���ġ��@�N����һ��10~200����֮�g���@�N����(w��n)���ƽ�Ķ��ӕr�g�����ˁ��f̫���ˣ������ڕr�����Ć�Ƭ�C���Ԅt�����L�ġ�Ӳ��ȥ���Ӿ����ò����·�����Ӳ��ּ�֮̎����ܛ��ȥ���Ӳ���ȥ�����ӣ����DZܶ��Ӳ��ֵĕr�g�����I�P��(w��n)�����ٌ���̎���������@���x����ܛ��ȥ���ӣ����F(xi��n)�����Ȳ錤���I���е��ƽ���F(xi��n)�r�����ӕr10~200�����Ա��_���ӣ���(j��ng)��ֵ��20���룩���ӕr�Y(ji��)�������xһ��I/O �ڵ�ֵ���@һ�ε�ֵ�����1 ��ʾ���ƽ�ĕr�g����10~200 ���룬ҕ��ɔ_��̖�����x����ֵ��0�r�t��ʾ�а��I���£��{(di��o)������(y��ng)��̎������Ӳ���·��D3-15��ʾ��

�D ���I�����·
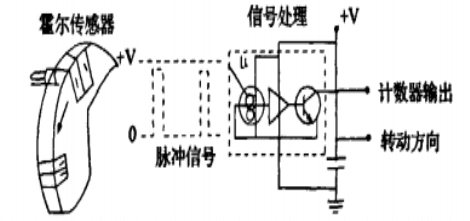
���ڜy����A44E���ɻ����_�P(gu��n)�������ֱ��D=6.004mm���L�Ȟ�L=3.032mm���S�F���䓡��Դ��ֱ���������_�P(gu��n)ݔ������λ��ֱ����(sh��)��늉���y�����ŸБ�(y��ng)����B��95A�ͼ��ɻ���Ԫ���y����

�D3-7����Ƭ���_ ���_�Ӿ�
5.4.1 A3144�����_�P(gu��n)�Ĺ���ԭ������(y��ng)���f������(j��)����Ч��(y��ng)���˂��ð댧(d��o)�w�����Ƴɵ�Ԫ���л���Ԫ���������Ќ��ň����С��Y(ji��)��(g��u)���Ρ��w�eС���l��푑�(y��ng)����ݔ��늉�׃�����ʹ�É����L�ȃ�(y��u)�c����ˣ��ڜy�����Ԅӻ���Ӌ��C����Ϣ���g(sh��)���I(l��ng)��õ��V���đ�(y��ng)�á�
����������A3144��Allegro MicroSystems��˾���a(ch��n)�Č��ء��_�P(gu��n)�ͻ���Ч��(y��ng)���������乤���ضȷ������_-40�桫150�档����늉��{(di��o)���·�������Դ���o�·������Ԫ�����ض��a���·����̖�Ŵ�����ʩ�����|�l(f��)����OC�Tݔ���O��(g��u)�ɣ�ͨ�^ʹ�����������Ԍ���ݔ������CMOS߉�·��ԓоƬ���гߴ�С����(w��n)���Ժá��`���ȸߵ����c���ЃɷN���b��ʽ��һ�N��3�_�NƬС�ͷ��b����Y�顰LH������һ�N��3�_ֱ��ʽ���b����Y�顰UA����
A3144Eϵ�ІΘO�ߜػ���Ч��(y��ng)���ɂ��������ɷ�(w��n)���Դ������늉��l(f��)��������ַŴ�����ʩ�����|�l(f��)����ݔ���Ŵ����M�ɵĴ�������·����ݔ���ŸБ�(y��ng)���ȣ�ݔ����һ����(sh��)��늉�Ӎ̖������һ�N�δŘO�����Ĵ����·���m���ھ��λ������δ��w�¹������ɑ�(y��ng)������܇���I(y��)��܊�¹����С�
���������������ΈD���c�ň��������P(gu��n)ϵ��D2-4��ʾ���ň��ɴ���ṩ�����Ի����������ʹ����Ҫ�䌦ʹ�á�

����Ԫ���ʹ�� ���_�D
�D3-8 ���������������ΈD
ԓ�����������ĽӾ��D��D3-9��ʾ��

�D3-9 �����������ĽӾ��D
�y��늙C�D(zhu��n)�ٵĵ�һ������Ҫ��늙C���D(zhu��n)�ٱ�ʾ���Ƭ�C�����R�e���}�_��̖���Ķ��M���}�_Ӌ��(sh��)��������������һ�N�D(zhu��n)�ٜy��ϵ�y(t��ng)�Ă����������нY(ji��)��(g��u)�ι̡��w�eС�������p�������L�����b����ȃ�(y��u)�c������x�û����������z�y�}�_��̖��������Ĝy��ԭ����D2-6��ʾ����늙C�D(zhu��n)�ӕr�����ӂ������\�ӣ��a(ch��n)������(y��ng)�l�ʵ��}�_��̖����(j��ng)�^��̖̎����ݔ����Ӌ��(sh��)�����������}�_Ӌ��(sh��)�b�ã��M���D(zhu��n)�ٵĜy��[6]��
�D3-10���������y��ԭ��
6 ϵ�y(t��ng)�����{(di��o)ԇ
�������w�D���£�
���Y(ji��)
����������ֱ��늙CPWM�{(di��o)��ϵ�y(t��ng)���Ե̓rλ�Ć�Ƭ�CSTC89C51����ĵģ���ͨ�^��Ƭ�C�팍�F(xi��n)늙C�{(di��o)�����ж�N;������������������������Ӳ������Ӳ���cܛ����Y(ji��)�ϵķ�����늙C�D(zhu��n)���M���{(di��o)��������PWMܛ�������팍�F(xi��n)�{(di��o)���^�̵ă�(y��u)�c�Ǔ��и����`���Ժ��ͳɱ������܉���Ч�l(f��)�]��Ƭ�C���ƃ�(y��u)�c��Ч�ܣ����ں����ٶȿ���ϵ�y(t��ng)���F(xi��n)�ṩ���^����Ч��;����
���x
��(j��ng)�^�@�ή��I(y��)�O(sh��)Ӌ�Ҹ����H�࣬����ʽ�M���O(sh��)Ӌ֮ǰ���҅�����һЩ�W(w��ng)�ϵ��Y�ϣ�ͨ�^���@Щ�O(sh��)Ӌ�������_���Լ���˼·�����K�������Լ���˼·��
�˴ή��I(y��)�O(sh��)Ӌ���H�nj�ǰ�����W(xu��)��Ƭ�C���g(sh��)���\�ӿ�����Փ��һ�N�z���nj����W(xu��)֪�R���ںϣ�վ���µĸ߶ȿ����µĆ��}������Ҳ�nj��Լ��\�����W(xu��)֪�R��������һ�N��ߡ�ͨ�^�@�ή��I(y��)�O(sh��)Ӌʹ���������Լ�ԭ��֪�R߀���^Ƿȱ���Լ�Ҫ�W(xu��)���Ė|��߀̫�ࡣ��ǰ�����X���Լ�ʲô�|��������ʲô�|�����������c�۸��ֵ͡�ͨ�^�@���n���O(sh��)Ӌ���Ҳ����W(xu��)����һ���L�ڷe�۵��^�̣����Ժ�Ĺ����������ж���(y��ng)ԓ����ČW(xu��)����Ŭ������Լ�֪�R�;C�����|(zh��)��
���O(sh��)Ӌ��Ӳ���ϲ����˻���PWM���g(sh��)��H�͘�ʽ�(q��)���·����Q��늙C�R�(q��)�ӵ�Ч�ʆ��}����ܛ����Ҳ�����^�������ϵ�y(t��ng)�Y(ji��)��(g��u)���㷨������ˆ�Ƭ�C��ʹ��Ч�ʣ��Ҹ���Ч�Ŀ���늙C��
�@�ή��O(sh��)ʹ�����Ҫע����Փ֪�R��ע����Փ(li��n)ϵ���H����ǰһֱ�X����Փ֪�R�x�҂����h����Փֻ�Ǵ�Մ��Մ���@�Űl(f��)�F(xi��n)��Փ����Ҫ�ԣ��@�Űl(f��)�F(xi��n)��Փ֪�R�c�����(li��n)ϵ����Ҫ�ԡ�
�����Ҫ���xκ�ώ������@�ή��I(y��)�O(sh��)Ӌ�Ĵ���֧�֣�ʹ�Ҳ��H��֪�R�������˸���һ�����˽⣬���������O(sh��)Ӌ�|����˼·�c߉�����и���̵�Ӱ푣�ʹ��֪�����O(sh��)Ӌ˼·�c߉����Ҫ�ԣ��ҫ@��˜\��
������Word��ʽ�ęn51�����d��ַ��
 ֱ��늙CPWM�{(di��o)��ϵ�y(t��ng)����Փ��.doc
(956 KB, ���d��(sh��): 48)
ֱ��늙CPWM�{(di��o)��ϵ�y(t��ng)����Փ��.doc
(956 KB, ���d��(sh��): 48)
| �gӭ���R (http://m.raoushi.com/bbs/) | Powered by Discuz! X3.1 |