
平地機是一種以刮土鏟刀為主,并配有其他多種輔助作業裝置,進行土壤的切削、 刮送和整平等作業的土方工程建設機械,其效率高、作業精度高、功用多,可進行路基、 路面的整形;礫石或砂石路的維修;挖溝、草皮或表層土的剝離;修刮邊坡等切削平整 作業,被廣泛用于公路、鐵路、機場、停車場等大面積場地的整平,也被用于進行農田 整地、路堤整形及林區道路的整修等。近幾年,隨著交通建設的迅速發展,各施工單位 在公路技術質量上的競爭越加激烈,尤其對路面平整度的要求越來越高,為了保證施工 質量,這就要求一方面工程技術人員以及操作手必須精心施工,并在施工工藝上不斷鉆 研總結;另一方面在平地機上使用先進的整平技術,運用自動找平系統。前者由于人工 操作平整精度有限,并且勞動強度大,實施起來困難,所以國內外一般都致力于后者的 改進和完善。[1]
微電子技術和計算機技術的迅速發展,數字控制系統在工程機械中得到更為廣泛的 應用,基于微處理器或單片機的控制系統以及嵌入式控制系統在現代工程機械中正在逐 漸普及,并成為施工質量的保證。國外一些公司己經研制出基于微處理器的數字式自動 找平控制器,并已成功應用到產品中去,取得了比較滿意的效果;國內也有采用數字式 自動找平控制器的,數字化自動找平系統的應用,不僅提高了系統的控制精度,而且也 提高了系統的綜合技術性能。現場總線技術的不斷發展,使分布式控制系統得到廣泛的 應用,對于自動找平系統也產生了一定的影響。目前,非接觸式自動找平系統已經成為 自動找平技術的主流,在這方面主要有兩種技術,超聲波自動找平技術和激光自動找平 技術。基于以上的討論,本論文主要研究了超聲波自動找平技術。
20 世紀 50 年代末期,美國 AKNSAS 州高速公路委員會的一名工程師發明了第一套 自動找平裝置。它結構簡單,靠手動操作完成縱坡和橫坡的調節。縱坡是靠基準線和一 個指示器來標志;橫坡是靠安裝在橫梁上的角度傳感器和一個指示器來指明。縱坡調節
工作原理:基準線掛在平地機一側,指示器裝在牽引梁樞鉸點附近并作為參考點搭在基準線上。當平地機行走在高低不平的基層上時,指示器隨著上下移動,此時,操作人員 通過旋轉手動厚度調節螺釘即可保證較平整的面層。橫坡調節工作原理與縱坡調節原理 類似。[1]
20 世紀 70 年代初期,研究人員在手動找平系統的基礎上研發出早期的自動找平系 統。它是靠移動牽引架來改變平地鏟刀的升降。由于這段時期工作寬度較小,所以都采 用縱坡和橫坡控制器來進行找平作業。早期是半自找平系統,該系統橫坡采用自動調節, 縱坡采用原來的手調裝置來控制;后期手動橫坡調節機構也被自動裝置取代,出現了全 自動找平控制系統,該系統工作特性相對較完善,且找平效果好。
工作原理:該自動找平控制系統由傳感器、控制箱、操作面板、執行機構(液壓馬達 或液壓缸)等部件組成。在整平之前,首先設定所需要的整平高度,工作時,控制面板、 縱坡和橫坡傳感器產生電脈沖信號并傳給控制箱,控制箱發出電信號使油缸做出相應的 動作來改變鏟刀的位置,這樣即可保證鏟刀始終保持在某一固定高度,達到整平目的。
傳感器:這段時期自動找平系統所采用的調節方式分兩個階段:初期,多數采用開關 控制方式,其傳感器多為液壓隨動器(即轉閥),以開、關和死區三種工作方式響應路面 的不平整度信號;中后期,隨著電子傳感技術的發展和廣泛應用,逐漸出現了電位器式、 應變片式、霍爾元件等類型的傳感器,同時配合相應的脈沖調節方式實現了比例脈沖控 制方式。如 VOGEEL 的脈頻調制式,AGB 的脈寬調制方式,提高了找平精度。
基準選擇:自動找平傳感器的工作基礎是建立一個參考基準。在這段時期所采用的 基準有三種形式: 輪式、滑靴式和基準線式。圖 1.1 所示為輪式隨動裝置的鏟平控制裝 置。方形連接套裝在鏟刀一側的背面,連接整個裝置的方形桿可插入套內,然后固定住。 整個工作裝置可以從鏟刀的一端換到另一端,拆裝很容易。工作時輪子在基準路面上被 鏟刀拖著滾動,輪子相對于鏟刀上下跳動量直接傳給鏟平傳感器上的擺桿,使之繞擺軸 轉動,轉動角由傳感器測得。轉動角的大小反映了鏟刀高度的變化。圖 1.2 所示滑靴式 隨動裝置。滑靴由連桿帶動,連桿與鏟刀背面的連接塊連接,可相對于鏟刀作上下擺動, 擺動量通過連桿上的支桿撥動擺桿傳給傳感器。圖 1.3 所示基準線設置方式。樁桿釘入 土內,上面套著橫桿,橫桿可以在樁桿上下滑動以調節基準線的高度,調好后用螺釘定 位。傳感器上的擺桿在彈簧拉力的作用下抵在基準線的下面。彈簧拉力可以起到補償基
基準線式找平效果較好,但容易受外界影響(如本身撓度及重力影響等);當基準路 面比較軟時,多采用滑靴式隨動裝置;輪式隨動裝置常用于比較硬的地面為基準時的作 業,如瀝青路面等。
近年來,隨著電子技術、計算機控制技術等的發展,平地機在性能上得到了進一步 的完善,具體涉及到自動找平系統、行走驅動系統、轉向系統等方面的改進。
其中自動找平系統的改變如下: 找平基準:在原有基準線、滑靴式和輪式找平基準的基礎上,20 世紀 70 年代中期
找平傳感器:20 世紀 90 年代的自動找平裝置中,非接觸式超聲波傳感器得到了應 用,增加了抗干擾能力,找平效果更趨于良好,如 ECADARPIDS 公司較早地采用了超聲 波傳感器。激光傳感器出現在 20 世紀 70 年代,由于其本身的復雜性以及受外界影響較 大,沒有得到發展。20 世紀 90 年代,美國一些公司正致力于激光傳感器的研究,有望 成為將來使用的重點。
控制器:20 世紀 70 年代,脈沖調制式的比例脈沖控制方式取代了前期的開關控制 方式,在控制精度上得到很大的改善,但與機液、電液伺服控制方式相比,仍存在不足。
20 世紀 90 年代,隨著計算機控制技術和液壓技術的發展,出現了數字控制器自動找平 裝置,它是微處理器與高速開關閥相結合的產物,如以 BMW—KNOX 公司最近生產的“LBA 平 NKOX”自動找平系統。此系統采用微處理器來自動控制縱坡和橫坡。與此同時,還
目前,國外的自動找平控制系統生產廠商主要有德國的 MOBA、美國的 AGL 公司、 丹麥的 TF—Trdaing 公司以及日本的TOCPNO 公司等,這些公司的產品代表著國際上 自動找平控制器的先進產品;國內自動找平控制系統的研發和生產廠家有江蘇寶應縣創 新工程電器廠、常州樹華電子有限公司以及孫祖望路橋技術研究有限公司研制的多點超 聲波自動找平控制器等為數不多的幾個廠商。
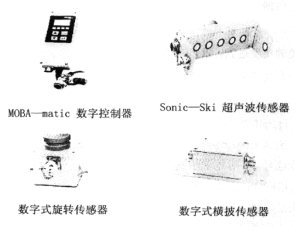
德國的 MOBA 公司生產的一系列自動找平控制器在國內的自動找平控制器市場占 有相當的份額,其主要的產品為 MOBA—matic 數字控制系統。MOBA—matic 數字控 制器采用數字化控制技術,控制精度高,安裝方便,操作簡單方便。它具有通用性強的 特點,可以和多種傳感器配合使用;Sonic—Ski 超聲波傳感器是世界上第一部并聯式多 超聲波束裝置,共有 6 個超聲波傳感器,其中5 個超聲波傳感器組成一個滑動靴,以確 保較大范圍地測量寬度和工作精度,第 6 只傳感器則起著溫度和其他因素補償的作用, 它能不斷的補償和消除由于溫度變化對超聲波傳感器的影響,從而提高控制精度;數字 式旋轉傳感器是利用鋼絲、路肩等基準,通過檢測旋轉角度變化的數據,與 MOBA— matic 數字控制器一起使用起到控制自動找平的作用,配套設備包括傳感器臂、傳感器 桿、傳感器靴。
為了提高系統的控制精度,丹麥的 TF—Trading 公司推出了高性能、高精度自動找 平系統 Mini-Line 非接觸找平控制器,該系統可以大幅度提高路面平整度指標。
美國 AGL 公司生產的激光找平控制裝置可以選用多種形式的激光傳感器,可根據 不同路面平整度的施工要求,選用 AGL 激光找平控制裝置中所配備的單坡向激光發射

隨著公路建設的迅猛發展,對于路面平整度的要求也隨之不斷提高。自動找平系統 是集機械液壓電子于一體的控制系統,在公路、機場、農田等大面積施工中,自動找平 控制系統性能的好壞是決定路面平整度的主要因素之一,而自動找平控制系統中的控制 器又是決定找平系統性能的主要部分,它的結構形式與工作原理一方面決定于相關技術 發展水平,另一方面也取決于系統的執行機構和其它環節的結構形式。基于 PLC、DSP、 單片機等微處理器的控制系統在現代工程機械中已經普及,數字式自動找平控制系統的 數字控制器的基本結構如圖 1.7 所示
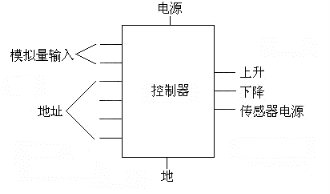
“模擬量輸入端”為外界模擬信號的輸入端,此信號經控制器內部的 A/D 轉換器換 為數字量,供微處理器進行進一步處理;“地址端”主要是為與其他控制器進行通訊而設 計的,“上升端”和“下降端”是輸出信號端,此輸出信號一般為脈沖形式,控制找平油缸 的升降,具體的脈沖形式與所選的軟件有關。
國際半導體事業的不斷發展,實現對路面平整度的高精度控制,以直觀、友好的人 機界面為操作人員提供一個良好的操作環境,及時了解系統的運行狀態根據施工需求隨 時更改系統參數,利用微電腦控制技術,采用先進的算法,運用智能專家系統,研制出
目前,國內平地機以手動操作為主,勞動強度大,平整精度不高,在平地機上加裝 自動找平控制系統的技術尚未完全成熟,自動找平系統多數采用進口,國外的產品占據 了國內市場比較大的份額。這就加劇了我們與國外企業在自動化上的差距,不利于我國 企業發展和壯大。開發國產自動找平裝置,不僅是技術進步的需要,同時也將帶來巨大 的經濟效益和社會效益。本論文的研究目的就是根據國內自動找平控制系統研制的普遍 情況,立足于國內技術水平,利用國外的先進技術,開發適合我國國情的自動找平控制 系統,運用到平地機上,提高我國相關企業的產品檔次,以便更好的參與市場競爭。
根據目前國內平地機的技術現狀和自動找平控制系統在國內外的發展狀況,結合工 程機械智能化的發展趨勢,本課題的研究內容如下:
2、熟悉國內外先進的找平系統,確定平地機自動找平控制系統的基本控制方案與 研究目標;
3、平地機自動找平系統關鍵控制參數研究,建立自動找平控制系統的數學模型, 確定基于單片機的具體控制方案;
平整路面的平整度主要取決于安裝在機械上的自動找平控制系統,自動找平控制系 統通過控制油缸來調節工作裝置,從而有效提高路面的整平質量。因此,分析研究自動 找平系統的工作原理,將有助于我們對自動找平控制系統有更深刻的理解。
自動找平系統一般由檢測裝置、執行裝置和工作裝置等幾部分組成。圖2.1為美國 Sundstrand-Sauer公司生產的ABS1000自動找平系統。

1. 縱向傳感器 安裝在牽引臂上,當路面不平引起牽引點上下移動從而使刮刀位 置發生變化時,與基準線接觸的縱向傳感器就會感知這一變化,并將這一變化量經過處 理變成變幅寬的脈沖電信號進入電磁閥,控制其開關時間的長短,在液壓系統的作用下 變成牽引臂的機械動作,從而消除這種偏差,使刮刀始終處于預先設定的位置。
2. 橫向傳感器 安裝在刮土鏟刀前端的橫梁上,用來檢測路面橫向坡度的變化, 工作原理同縱向傳感器。
3. 調節器 將傳感器檢測到的偏差信號與給定信號進行差動放大后,輸出一個根 據偏差信號變化的直流控制信號,將該信號與鋸齒波脈沖信號送入比較器比較輸出寬度 不同的調節脈沖信號。
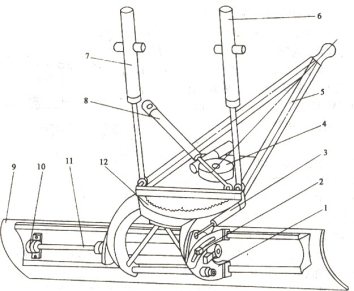 工作裝置:工作裝置即鏟刀。它位于機器的前后橋之間,用來完成剝離、轉移土壤 和平整等工作。[3]圖2.2為平地機鏟刀工作裝置結構圖。
工作裝置:工作裝置即鏟刀。它位于機器的前后橋之間,用來完成剝離、轉移土壤 和平整等工作。[3]圖2.2為平地機鏟刀工作裝置結構圖。
自動調平裝置是高性能平地機的關鍵部件,安裝自動調平裝置的平地機能明顯提高 作業效率和平整精度。國內外從20世紀70年代開始,先后研制出了多種找平系統,根據 檢測裝置可分為:
3) “激光”式 以激光束參照平面作為參考基準,控制液壓系統鏟刀的升降高 度,達到精確整平的效果;
4)“超聲波”式 以超聲波及其感應元件作為檢測裝置,后2種屬于非接觸式的自 動找平系統。
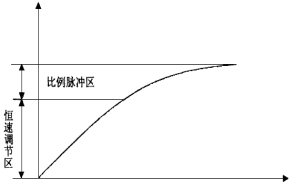
進行斷續控制。這種系統存在反應誤差,因此必須設置一個調節“死區”(或稱為起阻 尼作用的“零區”),傳感器越過死區后才有信號輸出。為了提高系統的反應精確性, “死區”應盡量減小但是系統是恒速調節的,如果“死區”范圍過窄,調節容易沖出“死 區”而出現誤差,即產生所謂的超調。超調需要反方向的修正,這樣在不斷的超調和修 正之間,系統就在“死區”附近來回的搜索零點,使系統發生振蕩,由此而影響到路面 的平整度。為了消除振蕩所引起的系統不穩定的缺陷,“死區”要足夠寬,讓系統在反 向修正時可由最高值趨向于零速,不會再沖向一邊,但是“死區”過寬又降低了系統的 精確度。所以要想在這種系統上獲得理想的找平效果,必須合理的確定“死區”的大小, 正確解決“死區”大小和控制精度之間的矛盾,才能保證精確的找平特性。此調平方式 不理想,但其結構簡單、價格低廉、使用方便。
(2) 比例式 這種系統是以液壓比例控制閥取代電磁換向閥演化而來的,他根據偏差信號的大小
以相應的快慢速度進行連續的調節。當系統偏差為零時,相應的調節速度也趨于零,因 此在這種調節方式下,基本上消除了系統因為超調而引起的振蕩現象。該系統可使得平 整出來的路面十分平整,但是它對系統結構精度的要求高、造價也相對較高。
(3)比例脈沖式 比例脈沖式自動控制系統是在開關式自控系統的“恒速調節區”和“死區”之間設
置一個“脈沖區”。脈沖信號根據偏差的大小成正比例變化,其變化方式主要有改變脈 沖寬度(PWM)和脈沖頻率(PFW)。傳感器檢測出偏差信號進入脈沖區后,調節器根據信 號的大小,以不同寬度或頻率的脈沖信號推動電磁閥動作,使得油缸工作。這種系統兼 備了前兩種系統的優點,大大縮小了“死區”的范圍,可以使系統的精度達到很高的標 準,而且價格低廉、經久耐用,是目前主要使用的自動找平控制方式。[3]
自動找平控制系統就是以補償路面系統誤差為目的的控制系統。工業上用的控制系 統,根據有無反饋作用可分為兩類:開環控制和閉環控制。
(1)開環控制系統。如果系統的輸出端和輸入端之間不存在反饋回路,輸出量對系 統的控制作用沒有影響,這樣的系統稱為開環控制系統。在開環系統中,動作信號是預
統。為了提高控制質量,系統常采用閉環負反饋結構,這種反饋控制系統的組成框圖如 圖 2.3 所示[7]
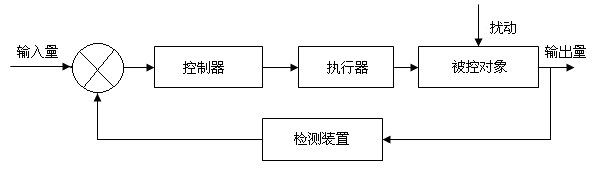
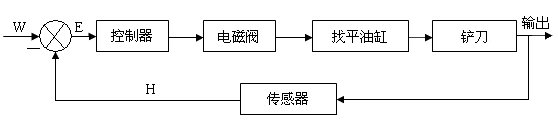
其中: W—設定的基準高度; E—偏差信號; H—檢測的實際高度。
平地機在進行平整工作時,由于路面的不平,引起鏟刀上下移動,傳感器檢測到路 面的高度 H,與設定的基準高度 W 就有偏差,產生偏差信號 E,然后通過調節器對誤 差信號做出相應的處理再給執行機構發出控制信號,控制油缸升降,從而達到施工高程 和設計高程的一致,保證路面的平整度。現在一般已經使用的比較成熟的控制系統都是 基于這個思想而設計的。
企業帶來了顯著的經濟效益,因此從推廣以來已逐步地在世界各地得到了廣泛使用。目 前非接觸式自動找平技術主要有超聲波自動找平技術和激光自動找平技術。
系統組成:2001年我國開始引進非接觸式超聲波調平裝置,又稱超聲波平均梁,它 由聲納傳感器、控制盒和平衡桿組成。采用的是超聲波測距原理,每側牽引大臂上固定 一條鋁合金梁(平均梁),朝下布置多個聲納傳感器(一般為四個)。整平作業時,聲納傳 感器向作為參考基準的地面發出聲納信號并接收返回信號,計算出距離地面的高度均 值, 以此來控制油缸的升降,進而控制鏟刀的升降,從而達到平整土地的目的。
工作原理:非接觸平衡梁通過安裝座與牽引臂相連,超聲波探頭通過差動串行總線 與控制盒構成主從式多級通訊系統。每個超聲波探頭分別測試探頭到路面之間的距離, 并上傳至控制盒,控制盒按照預定的算法處理這些數據,得到各個超聲波探頭到路面之 間的平均距離。通過比較實時平均距離與設定基準距離之間的偏差,產生校正信號控制 調平油缸的升降,使實時平均距離與設定基準距離之間的偏差處于設定的范圍內。由于 傳感器安裝于平地機的大臂上,鏟刀將隨大臂按基準線的高程作相應的調整,進而實現 對作業路面高程的控制。[11]
系統組成:20世紀70年代,美國首先將激光技術應用于農用平地機械,并取得了巨 大的經濟效益和社會效益。在國內自20世紀80年代開始,一些部門就已引進國外機型進 行試驗,但由于價格問題一直未能推廣。激光自動找平控制系統由激光發射器、激光接 收器、自動控制器組成。
工作原理:激光控制自動找平技術是利用激光束參照平面作為非視覺控制手段,代 替常規機械設備中操作人員的目測判斷方法,自動控制鏟刀的升降高度,以便達到精確 整平的效果。激光發射器是由有源電池驅動的一種激光發生裝置,它被安置在作業面適 當位置的三腳架上。激光發射頭在工作時是高速旋轉的,并可根據設定要求自動達到水 平面或斜坡面狀態,它發射的激光束可在作業面上形成一個激光光學平面,該平面即作 為整平作業的基準參照面。由于該參照面是處于一定空間高度的穩定平面,因而不受機 群作業和其它因素的干擾。激光接收器的功用是接收激光發射器發來的高程光信號,并

2.4.3 比較結論 超聲波自動找平控制系統的優缺點: (1)設備體積小、重量輕,安裝簡單方便結構緊湊,貯存運輸業很方便,使用時隨
(2)該系統選在路面上方,與路面非接觸,消除了壓痕及沾輪現象,而且可以回避 各種溝蓋、接縫等的影響,平地效果好。
(3)非接觸平衡梁工作時長度短,控制電路采用先進的數字電路,反饋信息快,能 夠及時地控制鏟刀位置調整,保證有較好的平整度效果。
(4)但超聲波在空氣中的傳播速度會受環境溫度、濕度等參數影響,為了提高測量 精度,一般都要設置補償和校正裝置,用來補償環境因素的影響。
激光自動找平控制系統結構簡單,拆裝方便,有很強的靈活性,相比于超聲波自動 找平控制系統平整精度高,作業效率高,但成本也較高。激光式找平系統也會受到環境 因素的影響,在能見度很低的情況下,會嚴重影響激光的傳輸,使系統工作不穩定。更 重要的是,此種找平系統對現場的管理要求較高。雖然系統本身可以區分現場人員流動 和雜物等引起的干擾,但如果工作人員過于繁雜,流動人員過多時,會使系統工作不穩 定,影響系統的控制精度。
根據以上的分析比較,考慮到成本,以及施工精度的要求,技術的成熟性等諸方面, 本課題主要研究非接觸式超聲波傳感器自動找平控制系統。
1.在施工中一些操作手對安裝的自動找平系統未能正確的掌握其性能要求,未能 正確使用、校對,造成精度不準,未能充分發揮其應有的作用,甚至停用。所以,必須 對操作手進行必要的培訓,同時每天工作時要校對自動找平系統,這樣可以保證整機工 作精度,確保每天的正常工作。
2.傳感器也是影響自動找平系統的一個重要因素。譬如,本系統采用的是超聲波 傳感器,利用的是超聲波測距原理:依靠超聲波的傳播速度和聲時來計算探頭到目標的 距離的。影響超聲波傳播速度的因素很多,在道路施工中,溫度、風力、煙氣是重要的 影響因素。所以必須采取其他措施來進行校正,可以依靠溫度傳感器和參考桿來補償超 聲波的傳播速度,保證它的測距精度。
3.通過對自動找平電液系統分析可知,控制器發出的信號并不是直接控制鏟刀的 上下移動,控制器和牽引架之間通過了一個液壓系統進行控制信號的傳遞。就液壓系統 來說,控制器控制信號的發出到電磁換向閥的響應再到油缸的運動直至達到要求的位置 需要一個響應時間,而這段時間內,控制器對鏟刀的位置也同時在不停的檢測,在油缸 還沒達到要求位置時,A/D所采集的信號并沒有真實的反映控制信號的控制效果,如果 這時候控制器對這段時間內采集的信號進行處理,結果將導致鏟刀始終在不停的上下移 動,不斷在調整自身的狀態。顯而易見,油缸運動位移很難達到理想的控制效果。所以, 液壓系統的滯后時間長短,控制器何時才能對控制信號進行響應是保證控制精度的主要 問題。
綜上所述,影響平地機自動找平系統精度的因素是多方面的,有平地機自身性質和 工作環境等外界因素,也與平地機自動找平系統的類型有關。這就需要我們不斷的利用 新技術,研究并改進自動找平控制系統,開發故障診斷等專家系統,不斷提高平地機平
通過對平地機自動找平裝置的工作原理分析,我們對平地機的找平性能有了理論上 的認識,但是在平地機自動找平控制系統中,不僅需要分析找平裝置的工作原理,而且 對液壓控制系統、超聲波傳感器、以及自動找平控制方案等都需要有進行一定深度的理 解和分析。
自動找平控制系統的研究已經歷了半個世紀的發展,就控制方式來說,從最初的開 關式控制發展到比例式控制再到目前常用的比例脈沖式控制;傳感器的發展也由單一的 角度傳感器發展到目前的超聲波和激光傳感器;同時在目前常用的自動找平控制系統中,用的較多的控制方式脈寬調制(PWM)技術。本章確定了平地機自動找平系統的控制 方案。
保證平整出來的路面平整度達到規定的要求是平地機自動找平控制系統的一項基本 功能。要實現對平地機鏟刀升降的精確控制就要求系統必須采用閉環控制,通過反饋來 判斷和調整控制信號的準確性。然而,對于自動找平系統來說,以往的模擬式控制系統 已經基本上能夠實現對鏟刀升降的控制,在數字式自動找平控制系統中不僅僅只是要將 控制精度提高,還應該考慮到讓操作人員能在工作中隨時可以了解到機器的運行狀態, 根據不同的路況和路面平整度要求對控制系統進行參數設置,使控制器在能夠滿足不同 等級路面施工的需求。綜合各方面考慮,平地機自動找平控制系統應該要求具備以下功 能:
1、具備兩種工作模式: 手動模式和自動模式,在平地機工作時應能在這兩種工作模 式之間相互切換。
2、具有靈敏度設置功能, 使平地機在不同的施工環境和平整不同等級的路面時能對 靈敏度進行調整,通過合理設置很好的協調好保證路面平整度要求和減小自動找平系統 振蕩兩者之間的矛盾。
3、系統也應該具有控制窗口設計功能, 平地機自動找平系統的基準是通過超聲波傳 感器設定, 在整平的過程中,由于路基高度的突變,超出了正常的工作范圍,超聲波傳感
系統應該設有一個窗口值,當超聲波傳感器檢測值與基準的差值超過窗口值,那么便認 為情況不正常,這時系統應立即停止輸出控制信號,同時以一定的方式通知操作人員, 讓他知道系統發生了故障,從而保證系統的正常運行。
4、在手動模式下,應屏蔽靈敏度和窗口設置功能。這時系統保持高度誤差顯示,同 時通過“增”和“減”兩個按鍵來控制鏟刀的升降。
5、在自動模式下,應能隨時對靈敏度和窗口值進行設置,通過系統各項參數的設置, 根據不同的高度誤差對鏟刀采用不同的調整方式,實現對鏟刀的精確控制。
在控制系統設計中,應該力求在實現所有功能的前提下,盡量使操作變得簡便(即必 須把控制面板設計得簡單明了),通過硬件和軟件的結合,不僅能實現對鏟刀的精確控 制,還要使的控制界面更人性化,操作更簡便。
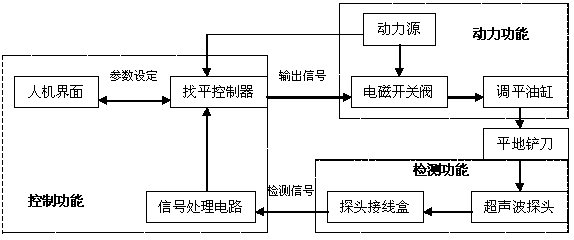
根據平地機自動找平控制系統的特性,以及平地機的結構特征等,確定平地機自動 找平控制系統的方案,如圖 3.1 所示。由平地機自帶的蓄電池向自動找平控制器和電磁 換向閥提供+24V 電源,首先通過人機界面設定平地機的工作基準,進入工作狀態后, 平地機開始勻速行使,超聲波傳感器開始檢測路面的變化,控制器通過不斷對超聲波傳 感器的采樣獲取路面的高度,并將其與設定的基準值進行比較取偏差,通過控制算法后 得出控制輸出信號,控制信號對電磁換向閥進行控制進而調整液壓油缸的升降,實現消 除誤差的目的,達到土地的平整。
主控制器的選擇是控制方案的一個重要環節,它直接影響到自動找平控制系統的性 能、價格以及控制功能等。滿足平地機使用功能要求的主控制器的選擇范圍有高性能單 片機、可編程控制器(PLC)、工業控制機、以及數字信號處理(DSP)等,這四種形式各有 優缺點。
1.單片機:在目前的應用研究中,較易于實現數字控制的方案是使用單片機來實現 其功能,尤其是新型的 8 位,16 位單片機具有 A/D、PWM、EEPROM、比較輸出、捕捉輸 入、SPI 接口、異步串行通訊接口、FLASH 程序存儲器等功能。單片機成本低,易開發, 因為單片機價格不斷下降,而其技術含量卻不斷提高。另外,單片機的應用已相當廣泛, 有許多可以借鑒的成功應用范例與大量的公用程序。尺寸小,結構易布置,由于單片機 及其外圍接口電路可以緊湊地放在一塊印刷電路板上,這就為控制器的面板設計帶來方 便,面板形狀與大小都可以在一定程度上隨意設計。對于一些比較復雜的控制,其計算 量往往很大,這樣,計算速度將直接影響控制精度。
2.可編程控制器(PLC):順序控制、運動控制、過程控制等。PLC 是專門為順序生 產過程而設計的控制器,它替代傳統的繼電器,具有很強的時序性。抗干擾能力強,因 為 PLC 是專門用于工業現場環境,在抗干擾能力方面優越于單片機系統。與電磁閥連接 容易,因為 PLC 的輸出形式為數字脈沖形式,可以通過開關量輸出組件輸出電平信號省 去了 D/A 轉換,直接驅動電磁閥、電磁繼電器和電磁開關等;同時可以大量節省外圍驅 動電路。與此同時,因為 PLC 是一種時序性很強的順序式控制器,其計算能力不是很強, 這就限制了一些控制方案的實現。雖然也出現了一些具有較強計算能力的 PLC,但其本 質并沒有脫離原來的特點,仍基于循環掃描和程序執行方式,往往影響計算速度。
3.工控機:相對于單片機和 PLC 來說功能靈活,結構復雜,它集單片機與 PLC 優點 于一體,具有很強的控制功能。工控機成本高,系統結構復雜,若和其它控制系統聯合 使用,不僅會降低成本,而且會協調控制系統的工作,采用先進的控制模式,實現控制 的智能化。編程容易,接口簡單,可以采用高級語言編程,設計友好的工作界面,利用 計算機強大的計算功能,編制復雜的軟件;另外,其接口都是標準接口,易于與各系統 之間進行通訊與連接。工業控制有強大的計算、管理及通訊功能,適宜于高性能進行機
據總線和程序總線分離的哈佛結構及改進的哈佛結構,采用流水技術,即每條指令都由 片內多個功能單元分別完成取指、譯碼、取數和執行等多個步驟,從而在不提高時鐘頻 率的條件下減少了每條指令的執行時間;DSP 芯片內有多條總線可以同時進行取指令和 多個數據存取操作,并且有輔助寄存器用于尋址,它們可以在尋址訪問前或訪問后自動 修改內容,以指向下一個要訪問的地址;DSP 芯片大多帶有 DMA 通道控制器和串行通信 口等,配合片內總線結構,數據塊傳送速度大大提高;DSP 芯片配有中斷處理器和定時 控制器,可以方便地構成一個小規模系統;具有軟、硬件等待功能,能與各種存取器接 口;針對濾波、相關和矩陣運算等需要大量乘法累加運算的特點,DSP 芯片大多配有獨 立的乘法器和加法器,使得在同一時鐘周期內可以完成乘、累加兩個運算;低功耗,一 般為 0.5~4W,而采用低功耗技術的 DSP 芯片只有 0.1W,可用電池供電,節能;驅動電 流小,驅動電磁閥需要外加外圍電路。
工控機具有超過 100OMHz 的工作頻率,非常完善的開發手段,非常豐富的軟件支持, 在這些方面,DPS 是無法與之相比的。但是,工控機并非針對實時信號處理而設計,其 數據輸入/輸出能力相對于其處理能力要低得多,其響應速度或者響應延遲不能滿足實 時處理要求。在相同的工作頻率下,工控機進行乘積、FTF、編解碼等常用數字信號處 理的速度要比 DPS 低得多。工控機本身結構復雜,功耗多,價格較高。
單片機有較高的運算速度,開發成本低,結構簡單,易于開發;另外,單片機的應 用已經非常的廣泛,具有許多可以借鑒的經驗,為控制器的設計帶來方便。[12][13]
場上有沒有符合我們要求的傳感器。同時必須弄明白其工作原理,這樣才能更好的使用 它,更好的明白整個自動找平控制系統。[12][14]
超聲波是一種特殊的聲波,它具有聲波傳輸的基本物理特性,如反射、折射、散射 等。超聲波測距傳感器就是利用超聲波的方向性、反射性等特性進行工作的,它的非接 觸性能在工程機械自動找平系統中有著明顯的優越性。近年來隨著超聲波技術和電子技 術的發展,超聲波測距傳感器在平地機、瀝青混凝土攤鋪機等非接觸式找平系統中得到 了廣泛的應用。
1、工作原理:非接觸找平系統中的超聲波測距傳感器是按照脈沖回波方式工作的, 其工作原理如圖3.2所示。
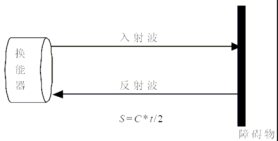
式中: S—探頭到目標的距離,m; C—聲波在介質中的傳播速度,m/s; t—聲時,s。
2、測試精度影響因素:在式(3.1)中,聲波在介質中的傳播速度C受多種因素影響, 是一個變量;聲時t由計時電路測量,并隨被測距離的改變而變化。式(3.1)兩邊微分得
②超聲波頻率影響 超聲波測距傳感器的換能器當收到機械回波信號后立即輸出電信號,電信號(接收
信號)的幅值隨時間的變化規律簡圖如圖3.3所示。如果取A點所在的水平電信號為觸發 計時電路的閥值,那么,計時電路的觸發工作時間比接收信號的開始時間滯后約2個周 期,在單程測試距離內將產生1個聲波波長的誤差,即
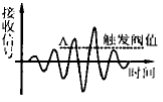
所以,超聲波頻率越大,周期就越小,傳感器的測試精度越高。但在選用超聲波換 能器時,還應考慮到超聲波換能器的頻率越大,傳播過程中的衰減系數越大,將影響它 的有效測試距離。
ⅱ)聲速的影響 式(3.1)表明:脈沖回波法超聲波測距傳感器在測試距離時,必須獲得超聲波在介質
中的傳播速度,才能從聲時中求出探頭到目標間的距離。超聲波的傳播速度是一個變量, 受多種因素影響,即使在傳播介質確定的情況下,介質溫度、聲壓、風力等的改變,也 將影響超聲波的傳播速度。[15][[16]
有 3 種輸出方式選擇,開關輸出:PNP 和 NPN,模擬量輸出 0~10V 和 4~20mA。考慮 到長距離傳播信號的失真問題,我們決定模擬量電流輸出 4~20mA ,選用型號為
 943-F4Y-2D-1D0-180E 超聲波傳感器。
943-F4Y-2D-1D0-180E 超聲波傳感器。外殼 | M18×1.0mm 塑料(PBTB) |
最大傳感距離 | 2000mm |
最小傳感距離 | 200mm |
響應時間 | 250ms |
重復精度 | ±2mm |
工作溫度 | -30℃~+80℃ |
中心頻率 | 40.0±1.0kHz |
最大驅動電壓 | 20Vrms |
靈敏度 | ≥-65dB |
聲壓 | ≥118dB |
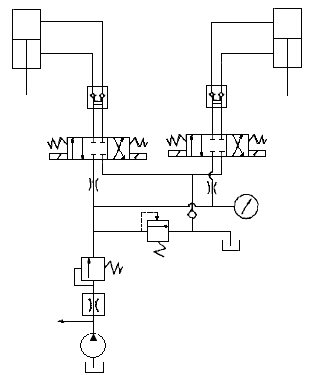
目前國內外生產的平地機均采用機電液一體化的自動找平控制系統,其中液壓系統 是多種多樣的,但其共同點都是向油缸供定量油液,以保證油缸調節的及時性及穩定性。 通常,典型的電液控制系統由油泵、安全閥、流量閥、電磁換向閥、液控單向閥、油缸 及油管、接頭等組成(參見圖 3.5)。系統采用定量泵供油,油泵輸出的壓力油經過兩個 流量閥排出定量的油液,在電磁換向閥的控制下經液控單向閥進入左右兩個油缸。再經 油缸活塞桿的伸縮來控制牽引架繞前鉸點上下擺動,從而達到對平地鏟刀高度的精確把 握。
在工作過程中,首先通過控制器設定整平基準,當平整路面發生上下起伏的變化時, 牽引架會發生上下移動,所以它也會帶著鏟刀一起升降,同時安裝在牽引架上的超聲波 傳感器也共同升降。這樣,超聲波傳感器就能檢測到當前的與路基的實際距離,通過與 基準值進行比較,可以得出偏差信號。這個偏差信號被控制器采樣后,通過一定的分析 和處理,發出控制信號,通過功率驅動電路給電磁閥供電。電磁閥接到信號后,根據信 號的不同做出不同的響應,使得牽引點的工作油缸上腔或下腔進油,讓牽引點回到原來
作為系統的主要控制對象,電磁換向閥的控制方式是決定整個控制系統性能的主要 因素。對于電磁換向閥的控制,目前主要有兩種控制方式,一是開關式控制;二是比例 脈沖式控制。基于系統的控制精度和穩定性考慮,本系統采用了脈寬調制(PWM)比例脈沖式來對電磁換向閥進行控制。
PWM 是通過改變導通時間 t 與工作周期 T 的比值,即調節占空比,使一個周期時間 內輸出的平均值與相應時刻采樣得到的信號成正比。如圖 3.6 所示不同的占空比情況。
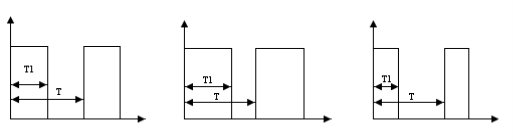
T1=T/2 T1>T/2 T1<T/2 圖 3.6占空比圖
的脈沖電壓,由于電磁鐵線圈電感的濾波作用而變為同頻率小幅度充電的近似直流電流 信號。當 fPWM遠高于電磁鐵線圈的截止頻率時,閥對 PWM 信號的響應不完全,其響應 特性近似于對模擬信號的響應,但疊加上一個脈動幅值很小的顫振信號, fPWM越高,脈動幅值越小。
PWM 信號的調制頻率的選擇應考慮閥本身的響應特性,例如固有頻率和過渡時間。 平地機自動找平系統的電磁換向閥的截止響應頻率為 4Hz,所以在設置 PWM 信號輸出時, 其頻率必須小于截止頻率。本系統將輸出的 PWM 控制信號頻率設定為 3Hz,通過改變 PWM 信號的占空比來控制電磁閥的通斷時間,從而達到對鏟刀的精確控制。
系統對工作油缸的行程控制采用分步進行的方式,通過超聲波傳感器檢測到的高度 信號,與系統設定的基準高度相比較,如果高度誤差超出了系統設定的靈敏度范圍,那 么對油缸的運動采取恒速控制(即使電磁閥始終處于常開狀態);若高度誤差在靈敏度范
為了使得系統的控制精度進一步提高,在脈沖區內對脈沖的寬度采用比例調節的方式, 根據逼近理想高度的不同程度來調整PWM 的占空比,這樣即能將調平精度控制在一個很 小的范圍之內,又可以最大限度的避免系統超調的發生。[12][17][18]
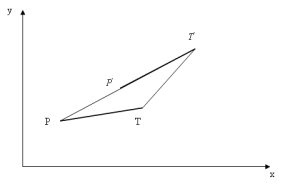
1、工作裝置的數學模型 設定平地機鏟刀所受的阻力保持不變,則鏟刀的運動將沿著牽引點的作用點連線方

靈敏度等級 | 靈敏度值(mm) | 死 區(mm) |
1 | 18.0 | 5.0 |
2 | 16.0 | 4.0 |
3 | 14.0 | 3.6 |
4 | 12.0 | 3.0 |
5 | 10.0 | 2.4 |
6 | 8.0 | 2.0 |
7 | 6.0 | 1.6 |
8 | 5.0 | 1.4 |
9 | 4.0 | 1.2 |
10 | 3.0 | 1.0 |
成比例的脈沖信號驅動電磁閥,使調平油缸以相應的速度調節鏟刀升降。控制器輸出的 PWM 波的占空比按一定比例變化(占空比的變化在 10%—90%之間)。
移動(如圖 3.9 所示),使得當路面的波動較大時鏟刀能夠在最短的時間內調整過來。系 統的恒速調節區大小為窗口值和靈敏度值之差,也隨著系統設置的不同而不同。[17][22]
(2) 介紹了超聲波傳感器的選擇,講述傳感器的選擇原則和超聲波傳感器的測距原 理及精度影響因素,最終選擇了美國霍尼韋爾公司生產的 943 系列超聲波傳感器;
(3) 接下來介紹了平地機自動找平控制系統的液壓系統,講述了自動找平液壓系統 的工作原理及確定采用 PWM 比例脈沖電磁閥的控制模式;
繼 1971 年微處理器的研制成功不久,就出現了單片的微型計算機即單片機,最早 的單片機是一位的。1976 年 Intel 公司推出了 8 位的 MCS—48 系列的單片機,它以其 體積小、控制功能全、價格低等特點,贏得了廣闊的市場。MCS—51 是在 MCS—48 的基 礎上于 80 年代初發展起來的,雖然它仍然是 8 位的單片機,但其功能較 MCS—48 有很 大的增強。此外,其具有品種全、兼容性強、穩定可靠、軟硬件資料豐富等特點,應用 愈加廣泛,直到現在 MCS—51 仍為單片機的主流系列。隨后又出現了 16 位單片機如 MCS
—96 系列,現在已經有了 32 位單片機,處理速度是提高了,功能強大了,但用的并不 多。考慮到控制系統的要求,以及工作的環境、價格等諸多因素,本系統采用 Intel 公 司生產的 MCS—51 系列的 8051 單片機作為微控制器。
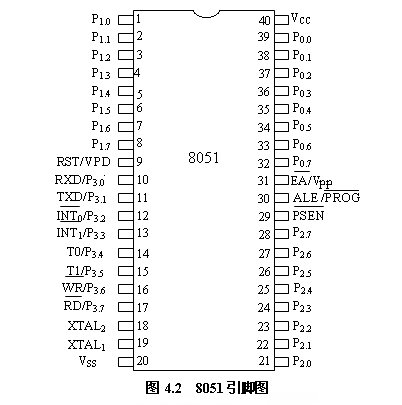
XTAL1(18 腳):接外部晶體和微調電容的一端;在 8051 片內它是振蕩電路反相放 大器的輸出端,振蕩電路的頻率就是晶體固有頻率。若需采用外部時鐘電路時,該引腳 輸入外部時鐘脈沖。
XTAL2(19 腳):接外部晶體和微調電容的另一端;在片內它是振蕩電路反相放大 器的輸入端。在采用外部時鐘時,該引腳必須接地。
RST/VPD(9 腳):RST 是復位信號輸入端,高電平有效。當此輸入端保持兩個機器 周期(24 個時鐘振蕩周期)的高電平時,就可以完成復位操作。RST 引腳的第二個功 能時 VPD,即備用電源的輸入端。當主電源 VCC 發生故障,降低到低電平規定值時,將
+5V 電源自動接入 RST 端,為 RAM 提供備用電源,以保證存儲在 RAM 中的信息不丟 失,從而使復位后能繼續正常運行。
![]() ALE/ PROG(ADDRESS LATCH ENABLE/PROGRAMMING,30 腳):地址鎖存 允許信號端。當 8051 上電正常工作后,ALE 引腳不斷向外輸出正脈沖信號,此頻率為 振蕩器頻率 fosc 的 1/6。CPU 訪問片外存儲器時,ALE 輸出信號作為鎖存低 8位地址的
ALE/ PROG(ADDRESS LATCH ENABLE/PROGRAMMING,30 腳):地址鎖存 允許信號端。當 8051 上電正常工作后,ALE 引腳不斷向外輸出正脈沖信號,此頻率為 振蕩器頻率 fosc 的 1/6。CPU 訪問片外存儲器時,ALE 輸出信號作為鎖存低 8位地址的
![]()
![]() 當輸入信號 EA引腳接低電平(接地)時,CPU 只訪問外部 EPROM/ROM 并執行 外部程序存儲器的指令,而不管是否有片內程序存儲器。對于無片內 ROM 的 8031 等, 需外接 EPROM,此時必須將 EA引腳接地。如使用片內 ROM 的 8051,外擴 EPROM
當輸入信號 EA引腳接低電平(接地)時,CPU 只訪問外部 EPROM/ROM 并執行 外部程序存儲器的指令,而不管是否有片內程序存儲器。對于無片內 ROM 的 8031 等, 需外接 EPROM,此時必須將 EA引腳接地。如使用片內 ROM 的 8051,外擴 EPROM
P0 口(P0.0-P0.7,39-32 腳):P0 口是三態輸入/輸出接口,既可作為并行 I/O 口, 也可作為數據總線口。
P1 口(P1.0-P1.7,1-8 腳):P1 口是一個帶內部上拉電阻的 8 位準雙向 I/O 端口。 P1 口的每一位能驅動 4 個 LS 型 TTL 負載。在 P1 口作為輸入口時,應先向 P1 口鎖存 器(地址 90H)寫入全 1,此時 P1 口引腳由內部上拉電阻拉成高電平。
P2 口(P2.0-P2.7,21-28 腳):P2 口是一個帶內部上拉電阻的 8 位準雙向 I/O 端 口。P2 口的每一位能驅動 4 個 LS 型 TTL 負載。在訪問片外 EPROM/RAM 時,它輸出 高 8 位地址。
P3 口(P3.0-P3.7,10-17 腳):P3 口是一個帶內部上拉電阻的 8 位準雙向 I/O 端口。 P3 口的每一位能驅動 4 個 LS 型 TTL 負載。P3 口與其他 I/O 端口有很大區別,它除作 為一般準雙向口 I/O 口外,每個引腳還具有第二功能。
端口引腳 | 第二功能 |
P3.0 | RXD(串行輸入口) |
P3.1 | TXD(串行輸出口) |
P3.2 | INT0(外部中斷 0) |
P3.3 | INT1(外部中斷 1) |
P3.4 | T0(定時器 0 外部中斷) |
P3.5 | T1(定時器 1 外部中斷) |
P3.6 | WR(外部數據存儲器寫信號) |
P3.7 | RD(外部數據存儲器讀信號) |
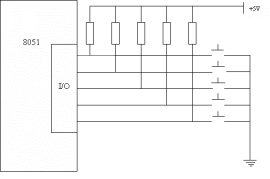
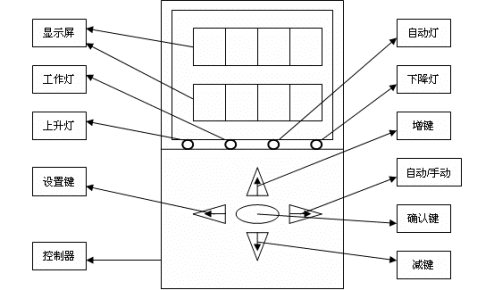
在平地機超聲波自動找平控制系統中通過 5 個按鍵來設置系統的工作參數和工作 狀態,分別是:設置鍵、自動手動切換鍵、增鍵、減鍵和確認鍵。在平地機工作過程中, 通過幾個按鍵設定控制器的工作參數,控制鏟刀的工作狀態,實現系統的精確控制。
● 增建和減鍵:這兩個按鍵配合著設置鍵一同調節系統的各項工作參數,同時在手動 狀態下可以通過這兩個按鍵直接控制平地鏟的升降。
● 確認鍵:參數設定完畢后,當按下該鍵,存儲所設定值,并返回到正常顯示狀態。 數字控制器利用單片機的 I/O口的引腳作為輸入端,圖 4.3 為開關量輸入接口電路 圖[25],采用的是獨立式非編碼按鍵電路。程序運行過程中不斷的對按鍵狀態進行掃描,
由于機械式觸點在閉合和斷開時,均發生抖動,抖動持續時間一般在 5~10ms 之間, 在此之間,邏輯電路的輸入端電平是不穩定的,CPU 在讀入觸點狀態時,會檢測到多 次的電平跳變,造成命令被重復執行。
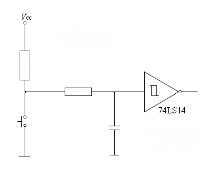
中 74LS14 為史密特反向器,可以消除輸入電平緩慢上升過程中輸出信號的毛刺。 采用硬件電路消除觸點抖動需要對每個鍵附加一套消抖電路,這樣會加大硬件成
本。在單片機系統中通常采用軟件方法解決:當 CPU 檢測到某一輸入電平變化時,先 延時 20ms,等觸點穩定下來后,讀入觸點狀態,從而避免了觸點的抖動。
為了保證按鍵每輸入一次僅作一次處理,需要在程序結構中加以考慮。按鍵輸入處 理程序的框圖如圖 4.5 所示。[21]

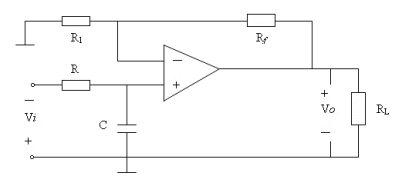
由于超聲波傳感器輸出的是電流信號(4~20mA),而單片機的 A/D 只能對電壓信號 (0~5V)進行處理,所以我們必須把從傳感器采集的電流信號轉換成電壓信號,所以本系 統設計了電流電壓轉換電路,如圖 4.6 所示

此電路實現了超聲波傳感器(4~20mA)的輸出電流信號到(0~5V)電壓信號的轉變, 電路簡單,可靠性高。
2、濾波放大電路設計 超聲波傳感器在工作的工程中,由于平地機機身不可避免的振動以及其他因素等,
導致超聲波傳感器探頭也發生振動,而且這種振動帶有一定的隨機性,它直接影響了傳 感器信號的真實性。所以我們采用一階有源濾波電路對信號進行濾波,將干擾信號消除, 使得輸出信號基本上能夠真實反映當前鏟刀的高度。同時該電路能夠對采集的信號進行
要有一定的時間來完成量化及編碼的操作。在轉換過程中,如果模擬量產生變化,將直 接影響轉換精度。特別是在同步系統中,幾個并聯的參量均需取自同一瞬時,而幾個參 數的 A/D 轉換又共享一個芯片,所得到的幾個量就不是同一時刻的值,無法進行計算和 比較。所以要求輸入到 A/D 轉換器的模擬量在整個轉換過程中保持不變,但轉換之后, 又要求 A/D 轉換器的輸入信號能夠跟隨模擬量變化,能夠完成上述任務的器件叫采樣/ 保持器(Sample/Hole),簡稱 S/H
發出時刻的模擬量輸入值,直到保持命令撤銷時為止。此時,采樣/保持器的輸出重新 跟蹤輸入信號的變化,直到下一個保持命令來到為止。[21][28]
最常用的采樣/保持器有美國 AD 公司的 AD582、AD585、AD346 等以及國家半導體公 司的 LF198/298/398 等。
LF198/298/398 是由雙級型絕緣柵場效應管組成的采樣保持電路,它具有采樣速度 快,保持下降速度慢,以及精度高等特點。作為單一的放大器時,其電路增益精度為
0.002%,采樣時間小于 6μs 時精度可達 0.001%,采用雙級型輸入狀態可獲得低偏差電 壓和寬頻帶。結型場效應管比 MOS 電路抗干擾能力強,而且不受溫度影響。總的設計保 證是,即使是在輸入信號等于電源電壓時,也可以將輸入饋送到輸出端。LF198 的邏輯 輸入全部為具有低輸入電流的差動輸入,允許直接的差動輸入,允許直接與 TTL、PMOS、 CMOS 電平相聯。其門限值為 1.4V。LF198 供電電源可以從±5V 到±18V。LF198 的原理

A/D 轉換。多路開關是用來切換模擬電壓信號的關鍵器件,為了提高參數的測量精度, 對其要求是:導通電阻小,開路電阻大,交叉干擾小,速度快。
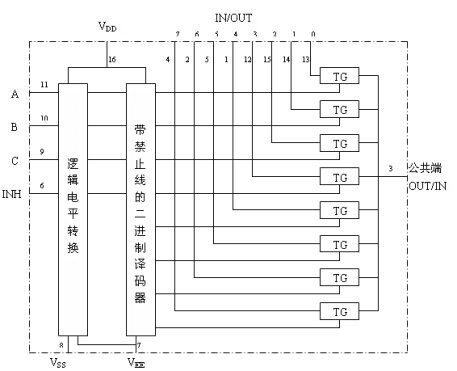
輸出接通。而當 INH 為高電平時,不論 A、B、C 為何值,8 個通道均不通。該多路開關 輸入電平范圍大,數字量為 3~15V,模擬量可達 15V。
單片機只能對數字信號進行處理,所以我們必須對模擬信號進行轉換,使它轉換成 單片機能夠處理的數字信號,而 A/D 轉換器就具有此功能,它是將模擬信號轉換為數字 信號最常用的器件。A/D 轉換器的種類很多,按工作原理可以分為逐次比較型和積分型 A/D 轉換器,按位數分類有 8 位、10 位、12 位、14 位和 16 位 A/D 轉換器等。本系統 采用的是 ADC0809 模數轉換器
ADC0809是采用逐次比較法的8位A/D變換芯片。芯片內部除A/D轉換部分外還有多 路模擬開關及其地址譯碼鎖存器,三態數據輸出鎖存器等電路。它可以直接與Z80、8085、
8080、8031等CPU相連,也可以獨立使用。 主要技術指標:
電源電壓:6.5V; 分辨率:8位;
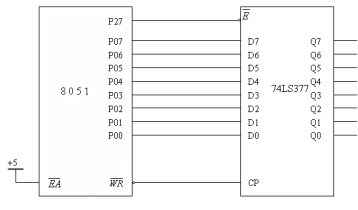
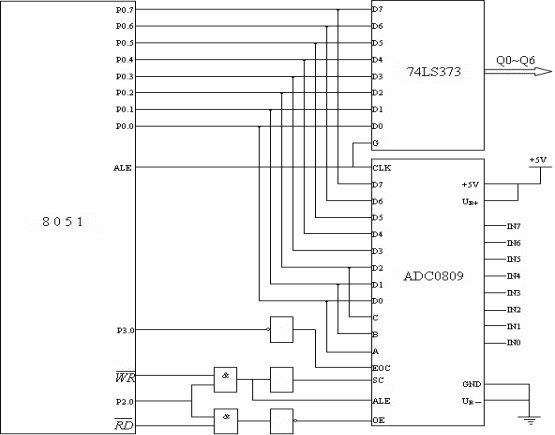 圖 4.11 是 ADC0809 與 8051 接口的連接方法。由于參考電壓 UR+接+5V 的電源, UR–接地,所以輸入信號的變化范圍是0~5V。單片機 8051 的 P2.0 配合 WR 引腳發送 ADC0809 的啟動轉換信號,配合 RD 引腳發送讀取 A/D 轉換結果的信號。P0 口的 P0.0, P0.1,P0.2 與 ADC0809 的地址線 A、B、C 相連接,對應 8 路輸入模擬信號的地址是 FEX8H~FEXFH。ADC0809 的EOC 經反相器與 P3.0 引腳相連接,則 8051 根據 P3.0 引 腳的狀態來判斷轉換結果是否結束。接口電路中 74LS373 是常用的鎖存器電路,主要 用來在總線傳輸電路中鎖存地址信息或數據信息,并實現總線信號的緩沖與驅動。
圖 4.11 是 ADC0809 與 8051 接口的連接方法。由于參考電壓 UR+接+5V 的電源, UR–接地,所以輸入信號的變化范圍是0~5V。單片機 8051 的 P2.0 配合 WR 引腳發送 ADC0809 的啟動轉換信號,配合 RD 引腳發送讀取 A/D 轉換結果的信號。P0 口的 P0.0, P0.1,P0.2 與 ADC0809 的地址線 A、B、C 相連接,對應 8 路輸入模擬信號的地址是 FEX8H~FEXFH。ADC0809 的EOC 經反相器與 P3.0 引腳相連接,則 8051 根據 P3.0 引 腳的狀態來判斷轉換結果是否結束。接口電路中 74LS373 是常用的鎖存器電路,主要 用來在總線傳輸電路中鎖存地址信息或數據信息,并實現總線信號的緩沖與驅動。
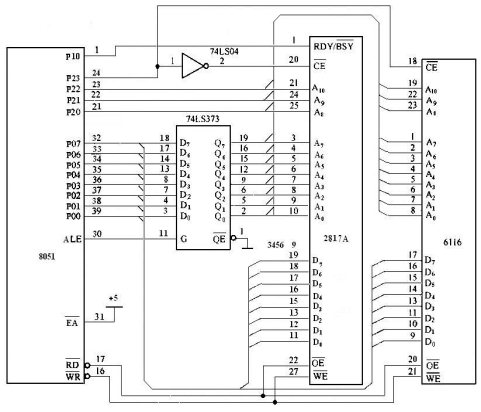
MCS—51 系列的單片機的程序存儲區和數據存儲區在尋址邏輯上是相互獨立的,程 序存儲區和外部數據存儲區的尋址空間各有64K。由于受生產工藝和成本的限制,8051 單片機內部只配置了 4Kb 的內部 ROM 和 128 個字節內部的 RAM,在應用中這些存儲器滿 足不了實際的需要,必須采用額外的存儲芯片,對程序存儲器和數據存儲器進行擴展。
在本文中用 2817A 電可改寫只讀存儲器(EEPROM),對程序存儲器進行擴展;6116 擴展數據存儲器,其擴展電路如圖 4.12 所示[21][24][29]
單片機所提供的輸入輸出(I/O)線很少,大多數應用系統需要外加擴展 I/O 接口。 MCS—51 系列單片機系統進行 I/O 擴展時,經常采用的是美國 Intel 公司的外圍接口芯 片,如并行接口 8255A、74 系列的 TTL 電路或 CMOS 電路等。本系統采用 74LS377 擴展
8 位輸出口,這類 I/O 口具有體積小、價格低、無需初始化、使用方便等優點,因而得 到了廣泛的應用。[28]
平地機在工作過程中,自動找平系統必須根據其運行的狀態以一定的方式通知操作 人員平地機目前的運行狀況。LED 顯示器的 7 段數碼顯示并不能滿足所有的要求,因此 本控制系統除了 LED 顯示之外還加上了一些系統狀態指示燈,使得系統運行狀態一目了 然。如圖 4.14 其硬件接口電路。

作業燈(Working):當系統處于正常工作狀態時,工作狀態燈始終是亮的,直到系統 停止運行。
油缸運動顯示燈(Lifting/Lowing):當油缸向上運動后,那么向上的指示燈就亮; 當油缸不運動時,那么不運動指示燈;當油缸向下運動后,那么向下的指示燈就亮。
對于平地機鏟刀升降自動找平控制系統而言,顯示器也是一個不可忽略的部分。在 單片機系統中,常用的顯示器有:發光二極管顯示器,簡稱 LED (Light Emitting Diode); 液晶顯示器,簡稱 LCD (Liquid Crystal Display);熒光管顯示器。其中發光二極管顯示 器結構、原理簡單,使用方便,是最常用的顯示器之一。
本文考慮到平地機自動控制系統需要顯示的內容以及特點,采用 MAX7219 顯示驅 動芯片來設計 7 段 8 位 LED 顯示器。
(1)共陽極接法 把發光二極管的陽極連在一起構成公共陽極。使用時公共陽極接+5V。陰極端輸
(2)共陰極接法 把發光二極管的陰極連在一起構成公共陰極。使用時會共陰極接地,陽極端輸入高
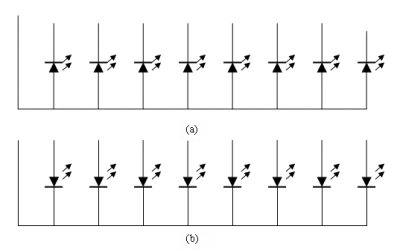
8 個共陰極 7 段 LED 顯示器。其片內包含有一個 BCD 碼譯碼器、多路復用掃描電路、 段和位驅動器及存儲每個數字的 8×8 固態 RAM。

DIG0—DIG7:LED 位線,從共陰極 LED 中吸入電流; LOAD:數據裝載信號輸入端,在 LOAD 的上升沿最后的 16 位串行數據被鎖入; SEGA—SEGG,SEGDP:段碼輸出端;
DOUT:串行數據輸出端,輸入到 DIN 的數據在 1615 個時鐘周期后在 DOUT 腳發 出,該腳用于與級聯擴展;
CLK:移位脈沖輸入端,最高時鐘頻率位 10MHz,在 CLK 的上升沿數據被鎖入內 部移位寄存器;在 CLK 的下降沿,數據從 DOUT 腳被輸出;
準備就緒,CLK 的每個上升沿將一位數據移入 MAX7219 內移位寄存器,當 16 位數據 移入完,在 LOAD 引腳信號上升沿將 16 位數據裝入 MAX7219 內的相應位置,在 MAX7219 內部硬件動態掃描顯示控制電路作用下實現以上動態顯示。
MAX7219 和 8051 的連接有兩種形式,并行接口方式和串行接口方式。本文采用并 行接口方式。如圖 4.17 所示

平地機自動找平控制系統的后向通道主要是指 PWM 信號的驅動電路,電磁換向閥兩 端的電磁鐵的驅動功率為 35W,單片機輸出的PWM 信號功率很小,不足以驅動電磁閥工 作,所以在后向通道中,我們必須加上一個驅動電路來提高 PWM 控制信號的驅動能力。 電路設計如圖 4.18 所示。[22]

而不是傳統的直接用它來控制電磁鐵,這樣使得驅動電路和主控制器完全隔離,確保控 制器的安全。
通過以上分析,實際上我們把驅動電路做成了一個類似于開關電路的模式,其開閉 狀態由 PWM 輸出的高低電平來決定,這樣可以消除 PWM 波用作光耦的控制信號后使得輸 出的信號在電平跳轉邊沿出現的一些波形失真的情況,從而實現了對電磁閥開閉時間的 精確控制。由于電磁鐵是感性元件,所以其瞬間的通斷電過程中,必然會產生較大的尖 峰脈沖,如果不加任何防范措施,這個反相的尖峰電壓將直接加在達林頓管上而將其燒 毀,所以我們在電磁鐵的正負端連上一個續流二極管,使得尖峰電壓通過續流二極管形 成的回路消耗掉,保證了達林頓管的安全。
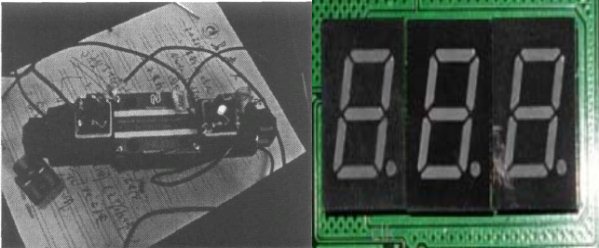
 按系統要求有兩個 4 位 7 段 LED 顯示器,在工作過程中,上 4 位顯示實際測量高 度值,下 4 位顯示設定基準值。圖 4.19為數字控制器的外觀圖,采用一體式外觀設計, 就是將 LED 顯示器,按鍵和工作狀態指示燈做在一起,這樣就可以使得操作人員能夠 很方便的了解系統的工作情況,隨時對系統參數做出調整。[17][21]
按系統要求有兩個 4 位 7 段 LED 顯示器,在工作過程中,上 4 位顯示實際測量高 度值,下 4 位顯示設定基準值。圖 4.19為數字控制器的外觀圖,采用一體式外觀設計, 就是將 LED 顯示器,按鍵和工作狀態指示燈做在一起,這樣就可以使得操作人員能夠 很方便的了解系統的工作情況,隨時對系統參數做出調整。[17][21]
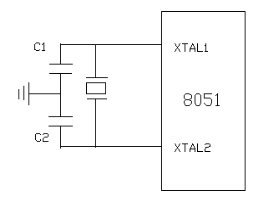
8051 芯片內部有一個用于構成振蕩器的高增益反相放大器,引腳 XTAL1 和 XTAL2 分別是此放大器的輸入端和輸出端。把放大器與作為反饋元件的晶體振蕩器或陶瓷諧振 器連接,就構成了內部自激振蕩器并產生振蕩時鐘脈沖。
(即 2 個機器周期)以上,8051 就會執行復位操作,然后把 RST 恢復為低電平。 復位操作有上電自動復位和按健手動復位兩種方式。上電自動復位是通過外部復位
電路的電容充電來實現的。電路如圖 4.21(a)。按健手動復位有電平方式和脈沖方式兩 種。其中按健電平復位是通過使復位端經電阻與 VCC 電源接通而實現的,其電路如圖
在系統硬件設計完成后,系統功能的實現主要是依靠軟件的設計來完成。本系統的 軟件設計采用模塊化設計,將系統分為若干個模塊,分別實現各項功能。這樣在系統軟 件的調試過程中,各個模塊的獨立調試有助于問題的發現和解決。在一定程度上減少了 程序錯誤的發生,同時也節約了程序的調試時間。
C 語言是一種使用非常方便的語言,使用 C 語言進行 8051 單片機開發有很大的優 勢。為此,從 20 世紀 80 年代中后期就已經開始將 C 語言向 8051 單片機上移植。近年 來,各生產單片機(微控制器)的廠家都相繼開發了一種專為單片機設計的 C 語言編譯器, 如德國 KELI 公司推出的 KELI C 就是一種高性能的 C 語言編譯器。它以代碼緊湊,使 用方便而得到用戶的廣泛使用。本系統程序的編寫和調試采用 8051 系列微控制器的開 發工具 Keil uvision2(此后簡稱 Keil)。Keil 是 8051 系列單片機的軟件開發工具,利用 該工具可以開發所有 8051 系列單片機的嵌入式應用。Keil 用來編譯 C 源碼匯編、匯編 源程序連接、重定位目標文件和庫文件、創建 HEX文件、調試目標程序。[33]
1、主程序模塊:主要完成系統各外設的初始化,并檢查系統參數設計的完整性, 調用掃描按鍵子程序等,等待各中斷的發生。
2、按鍵掃描模塊:主要完成系統中各個按鍵的狀態識別,通過識別執行相應的指 令,完成對系統的在線設置。由于系統的按鍵采用的是薄膜按鍵,所以在按鍵掃描過程 中(如自動/手動鍵)必須記住當前的狀態,假設第一次按下為自動狀態,則再次按下系 統將轉到手動狀態,如此交替循環。在靈敏度設定時,考慮到操作人員的方便性,若快 速按下增、減鍵則相應的系統值加(減)一,若是長時間按下不放,則相應的系統值將處 于連續加(減)狀態,直到按鍵松開為止。
3、顯示模塊:主要功能是顯示系統運行過程中高度偏差,以及設定的基準高度值, 以便操作員隨時對基準高度做出調整,而且采用 LED 顯示,方便直觀、簡單并且容易操 作。
數字控制器的軟件和硬件設計是一個不斷改進,不斷完善的過程,本文設計的平地 機自動找平數字控制器,需要通過實驗來驗證其性能,包括數字控制器的準確性和可靠 性,并在設計和開發過程中對數字控制器的硬件電路以及軟件進行不斷的調整,以達到 理想預期的效果。
逐步檢測數字控制器的控制功能和控制性能,適當調整數字控制器的硬件和軟件設 計,提高數字控制器的準確性和可靠性。通過實驗研究,模仿現場施工環境,驗證自動 找平控制系統的穩定性和控制效果,將測試得到的數據經過 Matlab 軟件進行數據處理 和曲線擬合,進行分析研究。
 PC 機、萬用表、示波器等。各器件如圖 6.1 所示。
PC 機、萬用表、示波器等。各器件如圖 6.1 所示。
數字式自動找平控制系統最重要的性能指標就是系統的穩定性和控制精度以及系 統的抗干擾特性。本實驗主要圍繞控制系統的這三個方面對數字式自動找平控制系統進 行相關參數的測定。
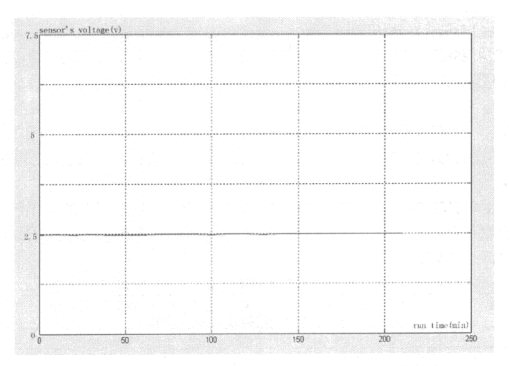
本實驗的目的是測試系統各項電壓參數以及控制器內部溫度在振動的條件下隨著 系統運行時間的變化。
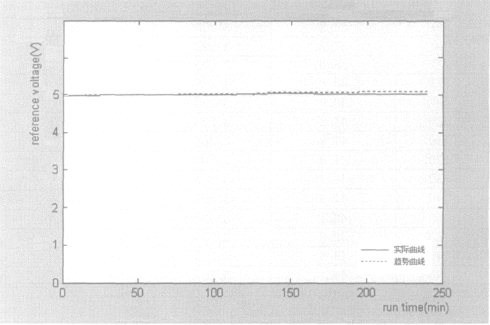
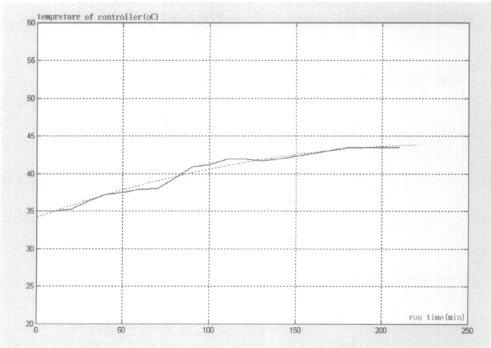
在外界環境溫度為 30℃左右的情況下,傳感器掃描高度固定在 40cm,系統連續運 行 24 個小時,觀察系統的控制器內部溫度、基準電壓值以及傳感器電源電壓值的變化
時間(min) | 基準電壓值(V) | 控制器溫度(℃) | 傳感器輸出電壓值(V) |
0 | 4.899 | 34.9 | 2.490 |
10 | 4.993 | 35.1 | 2.493 |
20 | 4.993 | 35.3 | 2.500 |
30 | 4.994 | 36.4 | 2.490 |
40 | 4.996 | 37.1 | 2.501 |
60 | 4.996 | 37.9 | 2.503 |
80 | 4.995 | 38.7. | 2.490 |
100 | 4.997 | 40.8 | 2.504 |
120 | 4.997 | 41.5 | 2.501 |
140 | 4.999 | 41.8 | 2.505 |
160 | 5.001 | 42.4 | 2.492 |
200 | 5.000 | 43.5 | 2.490 |
240 | 4.999 | 43.9 | 2.506 |
300 | 5.003 | 44.2 | 2.500 |
1440(24 小時) | 5.001 | 45.6 | 2.507 |
濾波和加了軟硬件濾波的情況下,以及系統在無干擾的情況下,實際高度變化(輸入)和 控制器顯示高度變化(輸出)之間的線性度。試驗得出三條曲線如圖 6.3 所示:
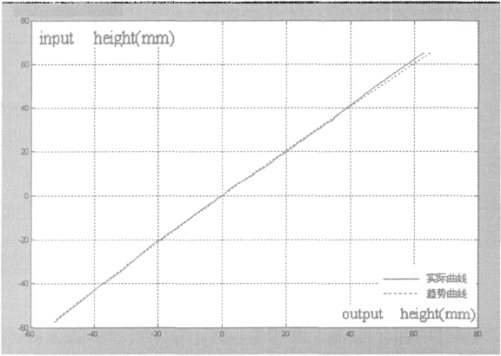

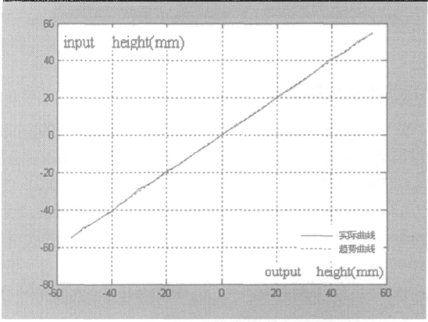
通過試驗得出系統在無外界干擾和有抗干擾措施以及在無抗干擾措施的情況下下 系統的輸入輸出線性曲線(如圖 6.3 所示),根據這三條曲線就可以對系統在有效控制區 內進行線性度分析。
根據傳感器本身的特性,在不加外部干擾的情況下,其線性度幾乎接近理性狀態值。 系統在加載了外部干擾后,其值產生了明顯的偏差(如圖 6.3.2 所示),通過對系統在有 抗干擾措施和無抗干擾措施兩種情況下,系統的輸入輸出關系曲線可以看到,信號經過 了軟硬件結合的濾波后,基本上消除了干擾信號對傳感器的影響。
 本實驗的目的主要是測試自動找平控制器在工作過程中,路基高度發生變化時,控 制信號(PWM)的輸出情況。如圖 6.4 所示
本實驗的目的主要是測試自動找平控制器在工作過程中,路基高度發生變化時,控 制信號(PWM)的輸出情況。如圖 6.4 所示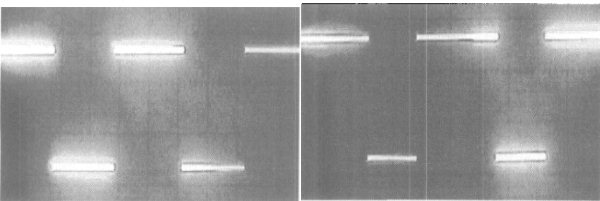 圖 6.4.3PWM 輸出波形 3圖 6.4.4PWM 輸出波形 4
圖 6.4.3PWM 輸出波形 3圖 6.4.4PWM 輸出波形 4通過操作測試實驗,驗證了本數字式自動找平控制器能夠準確的實現系統設計的各 項功能,通過檢測傳感器檢測路基的高度變化,用不同占空比的 PWM 波對電磁閥進行 精確控制。
24 小時工作,控制器內部溫度的變化為 34.9℃~45.6℃(一般的工業級芯片的工作溫度最 大可以達到 85℃),系統中基準電壓始終保持在 5.000V 左右變化,而傳感器的輸出電壓 僅在 2.49V 和 2.50V 之間變化,說明了系統在長時間工作下,能保持穩定的工作性能。
2、系統在無外界干擾和有抗干擾措施的情況下,控制器和傳感器的輸入輸出之間 的線性度較好,而在無抗干擾措施的情況下,系統的輸入輸出的線性度差。由此得出系 統設計的軟硬件相結合的多重濾波方式,基本能夠有效消除了干擾信號對控制器控制性 能的影響。
3、對控制器進行了操作試驗,試驗表明系統的 PWM 調節、參數設定、顯示等功能 實現了系統的設計要求;在自動狀態下,對路面整平的相對誤差較小,達到實際使用的
1)分析了國內外各種不同的自動找平控制系統,確定了非接觸式超聲波自動找平 控制系統的控制方案,單片機為控制系統的核心,配以外圍電路的設計,完成系統的自 動找平功能;
2)分析平地機自動找平控制系統的工作原理及影響因素,并對控制系統的各個環 節進行建模,確定了關鍵控制參數及 PID 控制算法;
3)以 8051 單片機為控制器的核心,設計了系統硬件的各個模塊:單片機系統、前 向通道模塊、后向通道模塊、數據存儲模塊、LED 顯示模塊、電源模塊等;
4)在 Keil uvision2 開發環境下,采用模塊化結構,完成了數字控制器的軟件設計, 主要包括:主程序、按鍵掃描子程序、自動找平子程序以及相應的顯示、算法等程序模 塊的軟件設計;
5)對數字控制器進行了功能試驗,試驗結果表明,該控制器能夠實現系統的各項 功能要求,采用的軟硬件相結合的方法能夠有效的消除干擾信號對控制器的影響,控制 器控制精度高,可靠性好。
隨著電子自動化技術的發展,控制器需要不斷的改進和完善,同時工程機械智能化 的迅速發展,為該領域提供了廣闊的發展前景,我們有理由相信未來的機械更具有智能 化,控制精度、可靠性更高。根據論文的研究,還需要從以下方面做些工作:
2.相比于激光傳感器,超聲波傳感器是便宜了,但超聲波傳感器還是比較貴,且 受工作環境的影響較大,這使得控制器的成本增加,誤差加大,所以必須開發研制出性 能好、價格更低的超聲波傳感器來滿足工程機械的需求;
 基于單片機的自動找平控制系統研究_陳杰榮.pdf
(3.43 MB, 下載次數: 10)
基于單片機的自動找平控制系統研究_陳杰榮.pdf
(3.43 MB, 下載次數: 10)
| 歡迎光臨 (http://m.raoushi.com/bbs/) | Powered by Discuz! X3.1 |